基于UWB定位技术的拌和站物料管控系统及方法与流程
本发明涉及智能控制,特别是基于uwb定位技术的拌和站物料管控系统及方法。
背景技术:
1、目前,混凝土拌和料场的智能化管控水平比较低,在料场进料、堆料,利用铲车等运输车辆在料仓取料、在配料斗倾倒的过程中,无法对物料信息进行识别及核对。在向配料斗处倾倒物料时,非常容易造成物料倾倒错误,整个取料和倒料的过程基本依靠车辆驾驶人员的操作经验及现场观察,料场的作业精度和效率均比较低。除此之外整个作业过程的状态无法进行数据采集,不利于后期进行智能化管理低。
2、现有的料场监控系统,通常解决的是料场运行的智能化管理,例如申请号为cn212160752u的专利给出了用于料场的无人值守工作系统、人机定位装置、防灾监控装置、料机监控装置、称重装置和运输设备识别装置等功能;实现了料场在环境及状态方面的智能化管控。申请号为cn106127444a通过绑定铲车装载物料类型与铲车作业运动轨迹关系,解决了铲车作业管理过程中物料错装问题。但以上监控管理系统在对物料进料、堆料以及由取料后向配料斗倾倒物料的操作过程中没有相应的智能监控措施,无法有效避免物料倾倒错误。而且未能将料场中的相关作业信息收集和存储,不利于后期进行智能化管理。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于uwb定位技术的拌和站物料管控系统及方法,该系统可自动识别车辆在料场中的位置信息、自动获取所取物料种类,并可根据料场实际几何尺寸定制料场进料、堆料、取料及倾倒过程的智能化管理方案。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明提供的基于uwb定位技术的拌和站物料管控系统,包括上位机控制系统、uwb基站、车载装置、铲车动作检测装置和通信装置;
4、所述车载装置包括uwb定位模块及控制电路,所述车载装置安装于作业车辆上,所述uwb基站和车载装置中uwb定位模块配合用于获取作业车辆在料场中的位置信息;
5、所述车载装置通过控制电路与铲车动作检测装置、通信装置相连,用于将获取的作业车辆的定位信息、作业车辆动作信息,然后通过通信装置传送给上位机控制系统行分析处理,并生成用于控制作业车辆的取料控制指令和物料倾倒控制指令。
6、进一步,所述uwb基站设置于料场中各料仓入口处或料场预设处。
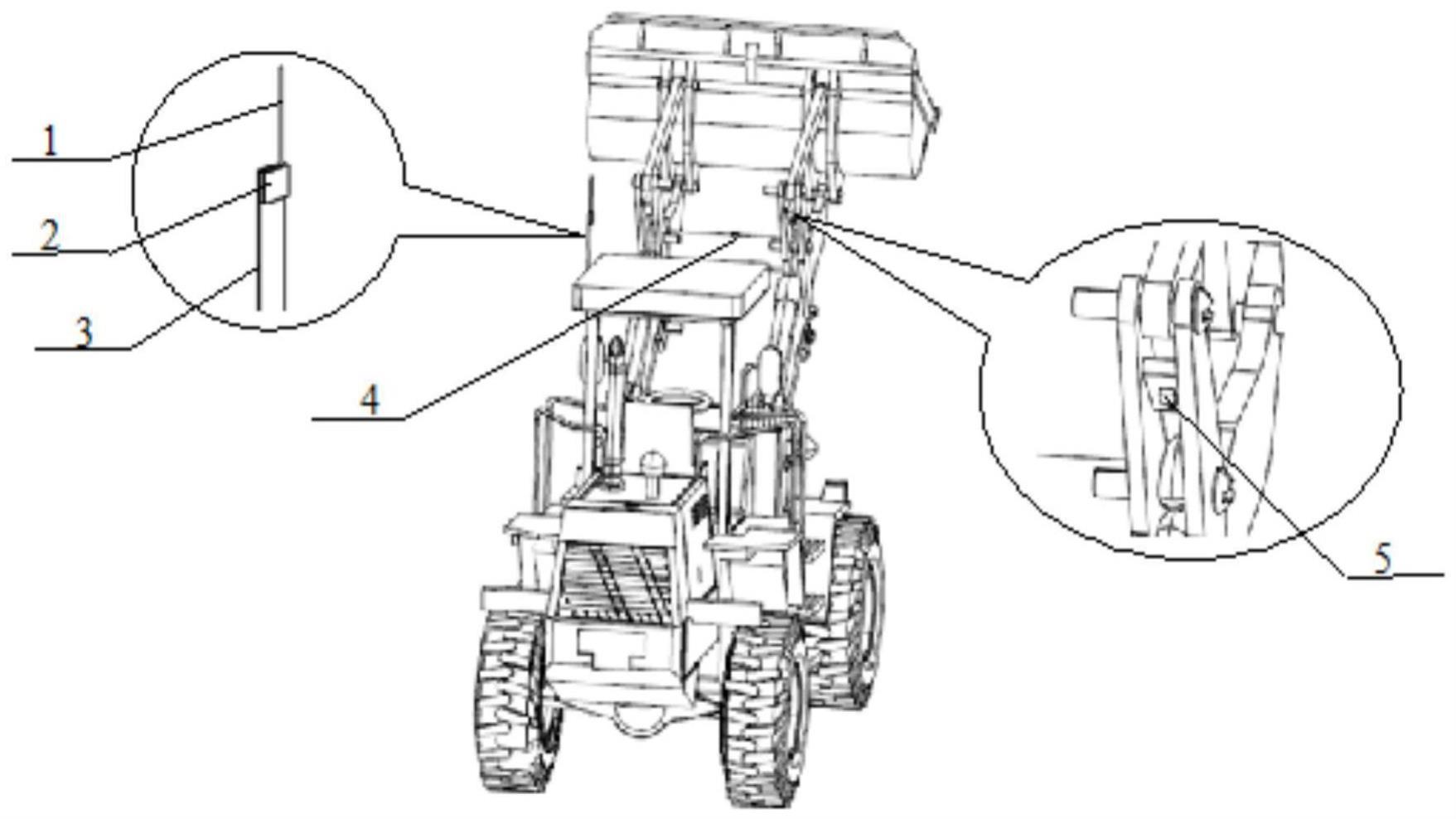
7、进一步,所述车载装置包括无线数传模块、语音模块,所述uwb定位模块包括布置于作业车辆车顶上方或侧面的uwb定位标签,所述uwb定位标签用于确定作业车辆在作业区域中的实时位置;所述无线数传模块与控制电路相连,用于将作业车辆的相关信息传回上位机控制系统;所述语音模块与控制电路相连,用于对作业车辆驾驶人员发出语音提示信号。
8、进一步,所述铲车动作检测装置包括设置于作业车辆上的传感器,所述传感器包括倾角传感器、位移传感器、行程开关中的任一种;所述铲车动作检测装置安装于铲车上,用于检测铲车在作业过程中的动作信号,并将采集的动作信号回传至控制系统,再经无线数传模块送至上位机进行处理。
9、进一步,所述通信装置为网络交换机,所述网络交换机与多个uwb基站、上位机控制系统相连。
10、进一步,所述上位机控制系统采用工业pc或通用pc中的任一种,所述上位机控制系统与通信装置、无线数传模块、料场信息显示装置相连;所述上位机控制系统对网络交换机与各个基站之间的通信状态、车载装置的工作状态进行实施监控,并信号发送回后方服务器或上传云端。
11、进一步,所述上位机控制系统设置有料场中料仓和配料斗布局图生成模块,用于标定料场中所布置的多个基站位置,以及确认各个料仓和料斗的边界位置,并生成料场的料仓和料斗布局图。
12、进一步,所述上位机控制系统包括料场实时状态监控及预警系统,所述料场实时状态监控及预警系统用于实时收集料场中各部件的工作状态,并根据工作状态生成预警信号。
13、本发明提供的料场智能管控方法,包括以下步骤:
14、获取料场布局、布置基站位置信息,料仓和料斗的边界位置信息,上位机控制系统根据获取的位置信息,自动生成料场中料仓和料斗布局图;
15、获取作业车辆运输的物料种类信息,将车辆的定位信息及所运载物料种类信息上传至上位机系统,上位机系统根据其运载的物料种类信息,结合料场布局图,将满足该物料堆放的料仓信息发送到车载装置;
16、作业车辆将料仓信息和车辆实时位置回传至上位机控制系统,上位机控制系统根据车辆的实时位置与料仓信息中的目标料仓的位置参数进行比对,如果所运输的物料可在当前料仓处堆放,则发提示信号,进行卸料操作;如果车辆位置物料种类与当前料仓不匹配,则表明物料种类不能在当前料仓堆放,则发报警信号并更换料仓位置,直至车辆定位信息符合堆料料仓要求,完成物料的卸料堆放。
17、进一步,还包括以下步骤:
18、上位机控制系统根据施工工艺要求,将拌和作业中取料信息通过无线数据传输系统传输至作业车辆搭载的车载装置中;
19、作业车辆根据的取料信息取料,获取作业车辆位置信息;
20、当作业车辆在料仓中时,控制电路读取铲车动作检测装置所检测的铲车状态,并将其状态信息回传至上位机控制系统,上位机控制系统根据取料车辆的定位信息,结合作业车辆动作信息,综合判断作业车辆当前是否处于铲料状态,如果满足铲料动作,则将当前料仓信息及所堆放物料信息回传至上位机控制系统;
21、上位机根据取料车辆回传的取料信息,根据预先设定的作业流程,将当前物料需要倾倒的目标配料斗信息发送至车载装置,同时上位机控制系统根据目标配料斗信息,在对应配料斗处信息显示装置上显示相应倾倒信息;
22、作业车辆结合配料斗倾倒指示信号,行驶至配料斗处,同时车载装置中uwb定位模块将车辆定位信息回传至上位机控制系统,上位机控制系统根据车辆的实际位置与目标配料斗的位置参数进行比对,如果所运输的物料可在当前配料斗处倾倒,则发出提示信号,进行倾倒操作,如果车辆位置与当前配料斗位置不匹配,则表明所运载物料不能在当前配料斗倾倒,则发报警信号提示驾驶人员更换配料斗位置,直至车辆定位信息符合目标配料斗要求,完成物料的倾倒操作;
23、倾倒结束后,驾驶人员驾驶车辆进行下一物料的取料,直至完成作业要求。
24、本发明的有益效果在于:
25、本发明提供的一种基于uwb定位技术的拌和站物料管控系统,可实现对所处料场的作业车辆的实时定位信息进行采集,从而实现在料场进料过程中,可根据进料车辆所运载物料类型自动匹配正确料仓堆料,还可以实现车辆在取料时自动获取物料信息,自动识别所取物料种类,在进行物料倾倒时与配料斗信息进行匹配,以便保证倾倒种类正确。同时对车俩驾驶人员发送明显提示信息,使操作方便可靠。同时,系统采用无线数传将整个作业过程中的相关信息上传至上位机控制系统及云平台,供统计及分析,以便定制料场智能化管理方案;该系统自动化程度高,无需人工过多干预,有效提高作业的准确性和效率。
26、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!