清洁路径规划方法、系统及自动清洁设备与流程
本发明涉及清洁设备,特别涉及一种清洁路径规划方法、系统及自动清洁设备。
背景技术:
1、随着自动化技术和人工智能技术的不断发展,洗地机、扫地机等各种自动清洁设备的应用越来越广泛,给人们的生活带了极大的便利。在传统技术中,扫地机等自动清洁设备在工作过程中,通常采用弓字形覆盖方式在待清洁区域中移动行走。自动清洁设备在采用弓字形覆盖方式行走时,均是按照预设路径顺序地依次碰到障碍物就转弯,弓字形行走的线段均平行。但是,由于待清洁区域的形状有时比较复杂,自动清洁设备按照预设路径行走时会出现需要多次转弯的情况,导致覆盖效率不高,影响清洁效果和效率。
技术实现思路
1、因此,本发明所要解决的技术问题是传统技术中由于待清洁区域的形状有时比较复杂,自动清洁设备按照预设路径行走时会出现需要多次转弯的情况,导致覆盖效率不高,影响清洁效果和效率。
2、为解决上述技术问题,本发明提供一种清洁路径规划方法,应用于自动清洁设备,所述方法包括:
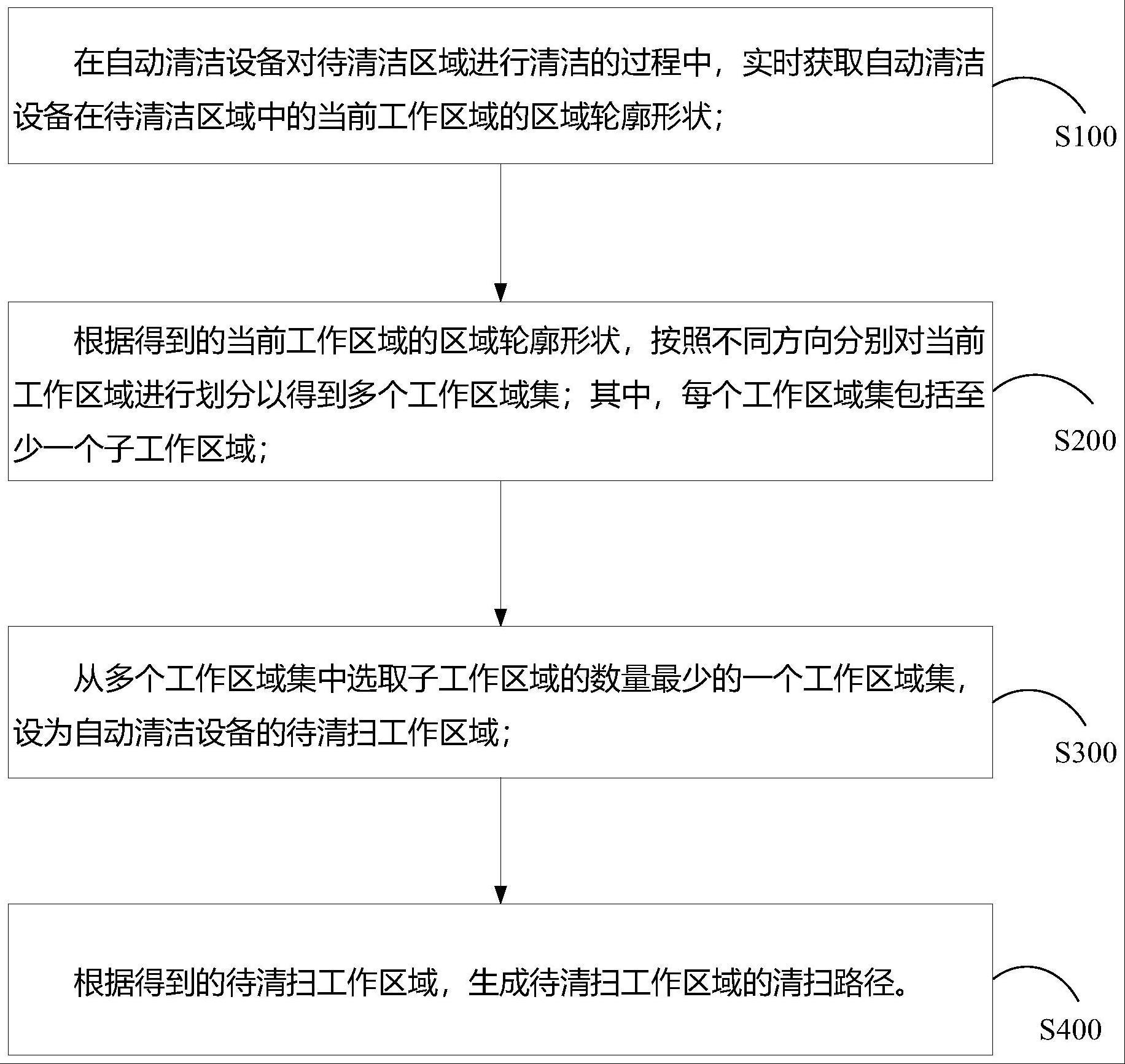
3、在自动清洁设备对待清洁区域进行清洁的过程中,实时获取所述自动清洁设备在所述待清洁区域中的当前工作区域的区域轮廓形状;
4、根据得到的所述当前工作区域的所述区域轮廓形状,按照不同方向分别对所述当前工作区域进行划分以得到多个工作区域集;其中,每个所述工作区域集包括至少一个子工作区域;
5、从多个所述工作区域集中选取子工作区域的数量最少的一个所述工作区域集,设为所述自动清洁设备的待清扫工作区域;
6、根据得到的所述待清扫工作区域,生成所述待清扫工作区域的清扫路径。
7、可选地,所述实时获取所述自动清洁设备在所述待清洁区域中的当前工作区域的形状,包括:
8、控制所述自动清洁设备在所述待清洁区域中前进,实时检测所述自动清洁设备的前进方向的周围的障碍物情况,并建立当前工作区域的障碍物地图;
9、根据得到的所述当前工作区域的所述障碍物地图,获取所述当前工作区域的所述区域轮廓形状。
10、可选地,所述根据得到的所述当前工作区域的所述区域轮廓形状,按照不同方向分别对所述当前工作区域进行划分以得到多个工作区域集,包括:
11、根据得到的所述当前工作区域的所述区域轮廓形状,分别按照横向、纵向、斜向对所述当前工作区域进行划分,得到对应的多个工作区域集;
12、其中,每个所述工作区域集包括多个子工作区域,且每个所述子工作区域为规则的方形区域。
13、可选地,所述分别按照横向、纵向、斜向对所述当前工作区域进行划分,得到对应的多个工作区域集,包括:
14、采用牛耕法覆盖方式,按照横向划分方式对所述当前工作区域进行划分,得到对应的一个工作区域集;
15、采用牛耕法覆盖方式,按照纵向划分方式对所述当前工作区域进行划分,得到对应的一个工作区域集;
16、采用牛耕法覆盖方式,按照斜向划分方式对所述当前工作区域进行划分,得到对应的一个工作区域集。
17、可选地,所述按照斜向划分方式对所述当前工作区域进行划分,包括:
18、按照东南向划分方式、或东北向划分方式、或西南向划分方式、或西北向划分方式对所述当前工作区域进行划分。
19、可选地,所述从多个所述工作区域集中选取子工作区域的数量最少的一个所述工作区域集,包括:
20、检测多个所述工作区域集中每个所述工作区域集的子工作区域的数量,并根据包含所述子工作区域的数量的多少对多个所述工作区域集进行顺次排序;
21、根据对多个所述工作区域集的顺次排序,获取包含所述子工作区域的数量最少的一个所述工作区域集。
22、可选地,所述设为所述自动清洁设备的待清扫工作区域,包括:
23、设置包含所述子工作区域的数量最少的一个所述工作区域集为所述自动清洁设备的待清扫工作区域。
24、可选地,所述根据得到的所述待清扫工作区域,生成所述待清扫工作区域的清扫路径,包括:
25、根据得到的所述待清扫工作区域,采用弓字形覆盖方式在所述待清扫工作区域中生成全部清扫线;
26、根据得到的所述待清洁区域的全部清扫线,形成所述自动清洁设备在所述待清扫工作区域中的清扫路径;
27、根据得到的所述清扫路径,控制所述自动清洁设备按照所述清扫路径对所述待清扫工作区域进行清洁。
28、此外,本发明还提出一种清洁路径规划系统,应用于自动清洁设备,包括:
29、工作区域形状获取模块,用于在自动清洁设备对待清洁区域进行清洁的过程中,实时获取所述自动清洁设备在所述待清洁区域中的当前工作区域的区域轮廓形状;
30、工作区域划分模块,与所述工作区域形状获取模块通信连接,用于根据得到的所述当前工作区域的所述区域轮廓形状,按照不同方向分别对所述当前工作区域进行划分以得到多个工作区域集;其中,每个所述工作区域集包括至少一个子工作区域;
31、清扫区域选取模块,与所述工作区域划分模块通信连接,用于从多个所述工作区域集中选取子工作区域的数量最少的一个所述工作区域集,设为所述自动清洁设备的待清扫工作区域;
32、清扫路径生成模块,与所述清扫区域选取模块通信连接,用于根据得到的所述待清扫工作区域,生成所述待清扫工作区域的清扫路径。
33、此外,本发明还提出一种自动清洁设备,包括:
34、设备本体;
35、工作区域检测机构,设于所述设备本体上;以及,
36、控制处理器,设于所述设备本体上,并与多个所述工作区域检测机构通信连接;
37、其中,所述控制处理器用于:
38、在自动清洁设备对待清洁区域进行清洁的过程中,实时获取所述自动清洁设备在所述待清洁区域中的当前工作区域的区域轮廓形状;
39、根据得到的所述当前工作区域的所述区域轮廓形状,按照不同方向分别对所述当前工作区域进行划分以得到多个工作区域集;其中,每个所述工作区域集包括至少一个子工作区域;
40、从多个所述工作区域集中选取子工作区域的数量最少的一个所述工作区域集,设为所述自动清洁设备的待清扫工作区域;
41、根据得到的所述待清扫工作区域,生成所述待清扫工作区域的清扫路径。
42、本发明提供的技术方案,具有以下优点:
43、本发明提供的清洁路径规划方法,通过对自动清洁设备的当前工作区域的区域轮廓形状进行实时监测,可以根据当前工作区域的区域轮廓形状对其进行采用多种方式进行划分,分别得到包含至少一个子工作区域的工作区域集,并可从中选取子工作区域数量最少的一个工作区域集作为自动清洁设备的待清扫工作区域,并生成该待清扫工作区域的清扫路径。这样,使得自动清洁设备可以根据当前工作区域的轮廓形状,设置和选取合适的清扫路径对当前工作区域进行清洁时,使得自动清洁设备在清洁过程中行走的子工作区域最少,转弯次数相对就会较少,通过较少的转弯次数和清扫路径就可以达到全面的清扫覆盖效果,提高了覆盖效率和清洁效率,也可达到良好的清洁效果。
- 还没有人留言评论。精彩留言会获得点赞!