基于平直导轨机械运动平台的仿真视线误差修正方法及系统与流程
1.本发明涉及武器制导控制仿真控制技术领域,具体地,涉及基于平直导轨机械运动平台的仿真视线误差修正方法及系统,更为具体地,涉及基于平直导轨机械式运动平台的目标视线仿真误差修正方法,是从五个维度实现机械式运动平台视线仿真误差的修正。
背景技术:
2.随着电子信息技术的快速发展,武器雷达探测系统的工作频段已从单频段扩展到了宽带宽、抗干扰性能好的多模宽频段领域。为在制导控制半实物仿真系统中实现武器宽频段电磁环境拟,需要模拟出高精度的武器-目标相对视线运动。
3.传统微波频段的武器-目标相对视线运动的模拟是通过飞行转台和微波天线阵面实现的。天线阵面以飞行转台回转中心为球心设计成了一个球面,通过阵面天线三元组的合成信号来实现目标视线的运动。该方法通过千级数量的微波目标模拟单元和信号处理单元能够实现目标视线的高精度模拟,但若阵面要扩展到多模宽频段,例如,在
±
15
°
视场的微波阵面基础上,扩展到w波段的射频阵面,则需要增加同等数量级的射频目标模拟和处理单元,w波段射频器件为3毫米级,研制成本较高,整个阵面波段扩展项目需要数亿的资金支持。
4.机械式运动平台可以搭载各类频段的射频目标信号辐射单元,实现宽频段目标的视线运动模拟,且对射频模拟单元的数量需求较少,其造价在几百万级别,具有低成本的优势。为了精确模拟目标视线,射频目标信号辐射单元需要在以飞行转台回转中心为球心的球面上运动,目前机械式运动平台有弧形和平直两种导轨,弧形导轨能够满足球面运动的要求,但与平直导轨相比较,基于弧形导轨设计的机械式运动平台其运动速度受限,无法模拟高动态的视线角速度。传统的二维(水平和竖直两个维度)平直导轨无法实现射频目标信号辐射单元的球面运动,会产生一个视线误差,因此在保证相对高动态的视线角速度的前提下,需要基于平直导轨设计控制方法对非球面运动而带来的视线仿真误差进行修正。
5.为了满足宽频段武器-目标相对视线运动的高精度仿真需求,本发明基于机械式平直导轨运动平台,对搭载在平台上的目标辐射单元运动轨迹的控制进行修正,在原有二维(水平、竖直两个维度)平台的基础上,将其扩展到五个维度(水平、竖直、前后、高低、方位)的控制,通过增加前后维度的控制将目标的运动从原先的二维平面修正到了理论球面上,并通过二维云台将目标辐射单元的波束指向修正到了转台回转中心,实现了目标视线模拟的误差修正,提高了宽频段仿真系统的高精度仿真能力,修正后的效果如图3、4所示。
6.专利文献cn113063438a(申请号:202110217951.4)公开了一种用于全物理仿真卫星视线指向的测量误差修正方法及系统,包括:步骤s1:测量全物理仿真设备三轴气浮台的转动中心坐标;步骤s2:测量卫星视线的出射点在三轴气浮台本体坐标系下的坐标分量;步骤s3:在卫星视线动态测量过程中,进行测量误差校正,获取用于全物理仿真的卫星视线指向的测量误差修正结果信息。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种基于平直导轨机械运动平台的仿真视线误差修正方法及系统。
8.根据本发明提供的一种基于平直导轨机械运动平台的仿真视线误差修正方法,包括:
9.步骤s1:仿真控制系统实时解算得到飞行转台控制指令和理论目标视线信息;
10.步骤s2:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台五维控制指令并发送至机械式运动平台;
11.步骤s3:机械式运动平台响应五维控制指令,飞行转台响应飞行转台控制指令,从而实现目标视线仿真误差修正。
12.优选地,所述步骤s1采用:武器制导控制仿真控制系统根据武器和目标信息,通过武器姿态实时解算出飞行转台控制指令;通过武器与目标相对运动关系实时解算出理论目标视线信息,并发送至飞行转台和机械式运动平台控制系统。
13.优选地,所述步骤s2采用:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令,并发送给机械式运动平台。
14.优选地,所述实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令采用:
[0015][0016]yctr
=r sinθ
[0017][0018]
其中,r为以飞行转台回转中心为球心机械式运动平台运动球面的球径,当θ和φ为0时,机械式运动平台的前后向直线导轨的控制量为0,此时测出平台到飞行转台回转中心的距离为r;θ表示理论高低向视线角;φ表示方位向视线角;x
ctr
表示直线导轨x轴向控制指令;y
ctr
表示y轴向控制指令;z
ctr
表示z轴向控制指令;
[0019][0020][0021]
其中,α表示云台高低向控制指令;β表示方位向控制指令。
[0022]
优选地,所述步骤s3采用:飞行转台响应仿真控制系统实时发出的飞行转台控制指令;机械式运动平台的直线导轨和云台实时响应机械式运动平台控制系统的控制指令,三维直线导轨实现机械式运动平台的以飞行转台回转中心为球心的球面运动控制,云台搭载目标信号辐射单元,实现目标波束指向修正,将波束控制到飞行转台回转中心。
[0023]
根据本发明提供的一种基于平直导轨机械运动平台的仿真视线误差修正系统,包括:
[0024]
模块m1:仿真控制系统实时解算得到飞行转台控制指令和理论目标视线信息;
[0025]
模块m2:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动
平台五维控制指令并发送至机械式运动平台;
[0026]
模块m3:机械式运动平台响应五维控制指令,飞行转台响应飞行转台控制指令,从而实现目标视线仿真误差修正。
[0027]
优选地,所述模块m1采用:武器制导控制仿真控制系统根据武器和目标信息,通过武器姿态实时解算出飞行转台控制指令;通过武器与目标相对运动关系实时解算出理论目标视线信息,并发送至飞行转台和机械式运动平台控制系统。
[0028]
优选地,所述模块m2采用:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令,并发送给机械式运动平台。
[0029]
优选地,所述实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令采用:
[0030][0031]yctr
=r sinθ
[0032][0033]
其中,r为以飞行转台回转中心为球心机械式运动平台运动球面的球径,当θ和φ为0时,机械式运动平台的前后向直线导轨的控制量为0,此时测出平台到飞行转台回转中心的距离为r;θ表示理论高低向视线角;φ表示方位向视线角;x
ctr
表示直线导轨x轴向控制指令;y
ctr
表示y轴向控制指令;z
ctr
表示z轴向控制指令;
[0034][0035][0036]
其中,α表示云台高低向控制指令;β表示方位向控制指令。
[0037]
优选地,所述模块m3采用:飞行转台响应仿真控制系统实时发出的飞行转台控制指令;机械式运动平台的直线导轨和云台实时响应机械式运动平台控制系统的控制指令,三维直线导轨实现机械式运动平台的以飞行转台回转中心为球心的球面运动控制,云台搭载目标信号辐射单元,实现目标波束指向修正,将波束控制到飞行转台回转中心。
[0038]
与现有技术相比,本发明具有如下的有益效果:本发明设计了一种基于平直导轨机械式运动平台的目标视线仿真误差修正方法,补偿了原二维平直导轨机械式运动平台的目标运动视线非线性误差,提高了武器制导控制系统的高精度仿真能力。
附图说明
[0039]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0040]
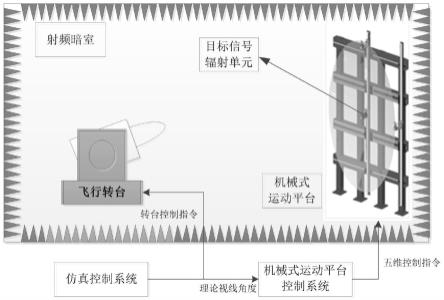
图1为本发明所描述的武器制导控制仿真系统组成及工作原理示意图。
[0041]
图2为本发明所描述的机械式直线运动平台五维控制示意图。
[0042]
图3为本发明所描述的机械式运动平台三自由度平直导轨角度误差修正示意图。
[0043]
图4为本发明所描述的机械式运动平台二维云台波束修正示意图。
具体实施方式
[0044]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0045]
本发明提供的一种基于平直导轨机械式运动平台的目标视线仿真误差修正方法,涉及武器制导控制仿真控制技术领域,它解决了机械式平直导轨运动平台目标视线仿真误差的问题。机械式平直导轨运动平台搭载目标信号辐射单元,配合飞行转台模拟武器和目标的相对视线运动,机械式运动平台采用前后、水平、竖直三个方向的平直导轨以及高低、方位两个方向的云台,通过五个维度,从角位置和波束指向两个方面对视线的仿真误差进行修正,有效地提高了宽频段仿真系统的高精度仿真能力。
[0046]
实施例1
[0047]
根据本发明提供的一种基于平直导轨机械运动平台的仿真视线误差修正方法,包括:
[0048]
步骤s1:仿真控制系统实时解算得到飞行转台控制指令和理论目标视线信息;
[0049]
具体地,所述步骤s1采用:武器制导控制仿真控制系统根据武器和目标信息,通过武器姿态实时解算出飞行转台控制指令;通过武器与目标相对运动关系实时解算出理论目标视线信息,并发送至飞行转台和机械式运动平台控制系统。
[0050]
步骤s2:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台五维控制指令并发送至机械式运动平台;
[0051]
具体地,所述步骤s2采用:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令,并发送给机械式运动平台。
[0052]
步骤s3:机械式运动平台响应五维控制指令,飞行转台响应飞行转台控制指令,从而实现目标视线仿真误差修正。
[0053]
具体地,所述实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令采用:
[0054][0055]yctr
=r sinθ
[0056][0057]
其中,r为以飞行转台回转中心为球心机械式运动平台运动球面的球径,当θ和φ为0时,机械式运动平台的前后向直线导轨的控制量为0,此时测出平台到飞行转台回转中心的距离为r;θ表示理论高低向视线角;φ表示方位向视线角;x
ctr
表示直线导轨x轴向控制指令;y
ctr
表示y轴向控制指令;z
ctr
表示z轴向控制指令;
[0058][0059]
[0060]
其中,α表示云台高低向控制指令;β表示方位向控制指令。
[0061]
所述步骤s3采用:飞行转台响应仿真控制系统实时发出的飞行转台控制指令;机械式运动平台的直线导轨和云台实时响应机械式运动平台控制系统的控制指令,三维直线导轨实现机械式运动平台的以飞行转台回转中心为球心的球面运动控制,云台搭载目标信号辐射单元,实现目标波束指向修正,将波束控制到飞行转台回转中心。
[0062]
根据本发明提供的一种基于平直导轨机械运动平台的仿真视线误差修正系统,包括:
[0063]
模块m1:仿真控制系统实时解算得到飞行转台控制指令和理论目标视线信息;
[0064]
具体地,所述模块m1采用:武器制导控制仿真控制系统根据武器和目标信息,通过武器姿态实时解算出飞行转台控制指令;通过武器与目标相对运动关系实时解算出理论目标视线信息,并发送至飞行转台和机械式运动平台控制系统。
[0065]
模块m2:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台五维控制指令并发送至机械式运动平台;
[0066]
具体地,所述模块m2采用:机械式运动平台控制系统接收理论目标视线信息,实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令,并发送给机械式运动平台。
[0067]
模块m3:机械式运动平台响应五维控制指令,飞行转台响应飞行转台控制指令,从而实现目标视线仿真误差修正。
[0068]
具体地,所述实时解算机械式运动平台三维直线导轨x轴向、y轴向、z轴向和二维云台高低向、方位向的五维的控制指令采用:
[0069][0070]yctr
=r sinθ
[0071][0072]
其中,r为以飞行转台回转中心为球心机械式运动平台运动球面的球径,当θ和φ为0时,机械式运动平台的前后向直线导轨的控制量为0,此时测出平台到飞行转台回转中心的距离为r;θ表示理论高低向视线角;φ表示方位向视线角;x
ctr
表示直线导轨x轴向控制指令;y
ctr
表示y轴向控制指令;z
ctr
表示z轴向控制指令;
[0073][0074][0075]
其中,α表示云台高低向控制指令;β表示方位向控制指令。
[0076]
所述模块m3采用:飞行转台响应仿真控制系统实时发出的飞行转台控制指令;机械式运动平台的直线导轨和云台实时响应机械式运动平台控制系统的控制指令,三维直线导轨实现机械式运动平台的以飞行转台回转中心为球心的球面运动控制,云台搭载目标信号辐射单元,实现目标波束指向修正,将波束控制到飞行转台回转中心。
[0077]
实施例2
[0078]
实施例2是实施例1的优选例
[0079]
本发明要解决的技术问题是提供一种基于平直导轨的机械式运动平台五维控制方法,通过前后、水平、竖直三个维度的平直导轨将目标辐射单元的运动控制在以飞行转台回转中心为球心的球面上,同时结合云台控制目标信号辐射单元高低、方位向的波束指向,从而实现机械式直线运动平台目标视线角仿真误差的修正。
[0080]
本发明提供的一种基于平直导轨机械式运动平台的目标视线仿真误差修正方法的实施基于武器制导控制仿真系统,该系统主要包含仿真控制系统、射频暗室、飞行转台、机械式运动平台控制系统和机械式运动平台以及平台上安装的目标信号辐射单元。系统组成及工作原理如图1所示,仿真控制系统实时给出理论视线角度和飞行转台控制指令,机械式运动平台控制系统实时解算出五维的平台控制指令,机械式运动平台搭载目标信号辐射单元响应五维控制指令,飞行转台响应转台控制指令,配合模拟武器-目标相对视线运动。图2为机械式直线运动平台五维控制示意图,该平台通过前后(z轴向)、水平(x轴向)、竖直(y轴向)三个方向的直线导轨以及高低、方位两个方向的云台来实现目标视线运动的模拟。图3所示,原先的二维(水平x轴和竖直y轴两个维度)机械式运动平台上,目标只能在二维平面上运动,会产生图3中所标示出的角误差ε,增加了z向的前后维度后,可以将目标的运动修正到上以飞行转台回转中心为球心的理论球面上。如图4所示为机械式运动平台二维云台波束修正示意图,云台方位向和高低向的运动修正了目标信号辐射单元波束指向的误差,修正前波束指向目标信号辐射单元的正前方,修正后波束指向于转台回转中心。最终通过五个维度的控制,可以实现目标视线的高精度模拟。
[0081]
本发明通过武器制导控制仿真控制系统、飞行转台、机械式运动平台、机械式运动平台控制系统和目标信号辐射单元,采用机械式运动平台三维平直导轨和二维云台的五维控制方法,实现了宽频段武器制导控制仿真系统的高精度目标视线模拟。
[0082]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0083]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0084]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1