机器人及其行走装置的控制方法及系统、设备与介质与流程
本发明涉及工业智能机器人,尤其涉及一种机器人及其行走装置的控制方法及系统、设备与介质。
背景技术:
1、航空发动机的内部的结构复杂,转子内腔狭小,转子外部流道空间非常有限,在试车过程或者装配到单元体后,为了确保内腔和流道状态正常,需要检查内腔和流道,目前大多数检查通过孔探仪,孔探仪是由一根末端带摄像头的线缆组成,由于自由度限制,检测转子组件时,需要转动转子才能检测一周,转动静子时,由于孔探仪末端的自由度有限,存在很多检测盲区,并且检查过程及其复杂且耗时很长,需要专业的操作人员经过培训才能操作孔探仪,因此,操作过程复杂、检测范围局限、耗时较长等等问题增加了发动机的装配周期和和试车检测维修时间。另一方面,现有的检测通常是在开阔空间,已有的检测机器人通常是在室外或者室内无空间限制的场景,发动机内部狭小空间的检测并不适用。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中航空发动机内部检测操作复杂且耗时长的缺陷,提供一种机器人及其行走装置的控制方法及系统、设备与介质。
2、本发明是通过下述技术方案来解决上述技术问题:
3、本发明提供了一种机器人的行走装置,包括本体和单足行走单元;所述单足行走单元包括肩膀本体支架、肩部机构、大腿机构、小腿机构;
4、所述肩膀本体支架设置于所述本体;所述肩部机构设置于所述肩膀本体支架,所述肩部机构相对于所述本体起落;所述大腿机构设置于所述肩部机构,所述大腿机构基于所述肩部机构转动;所述小腿机构设置于所述大腿机构,所述小腿机构基于所述大腿机构转动。
5、较佳地,所述大腿机构和所述小腿机构的运动方向一致;所述肩部机构的运动方向垂直于所述大腿机构的运动方向。
6、较佳地,包括至少四个独立控制的所述单足行走单元。
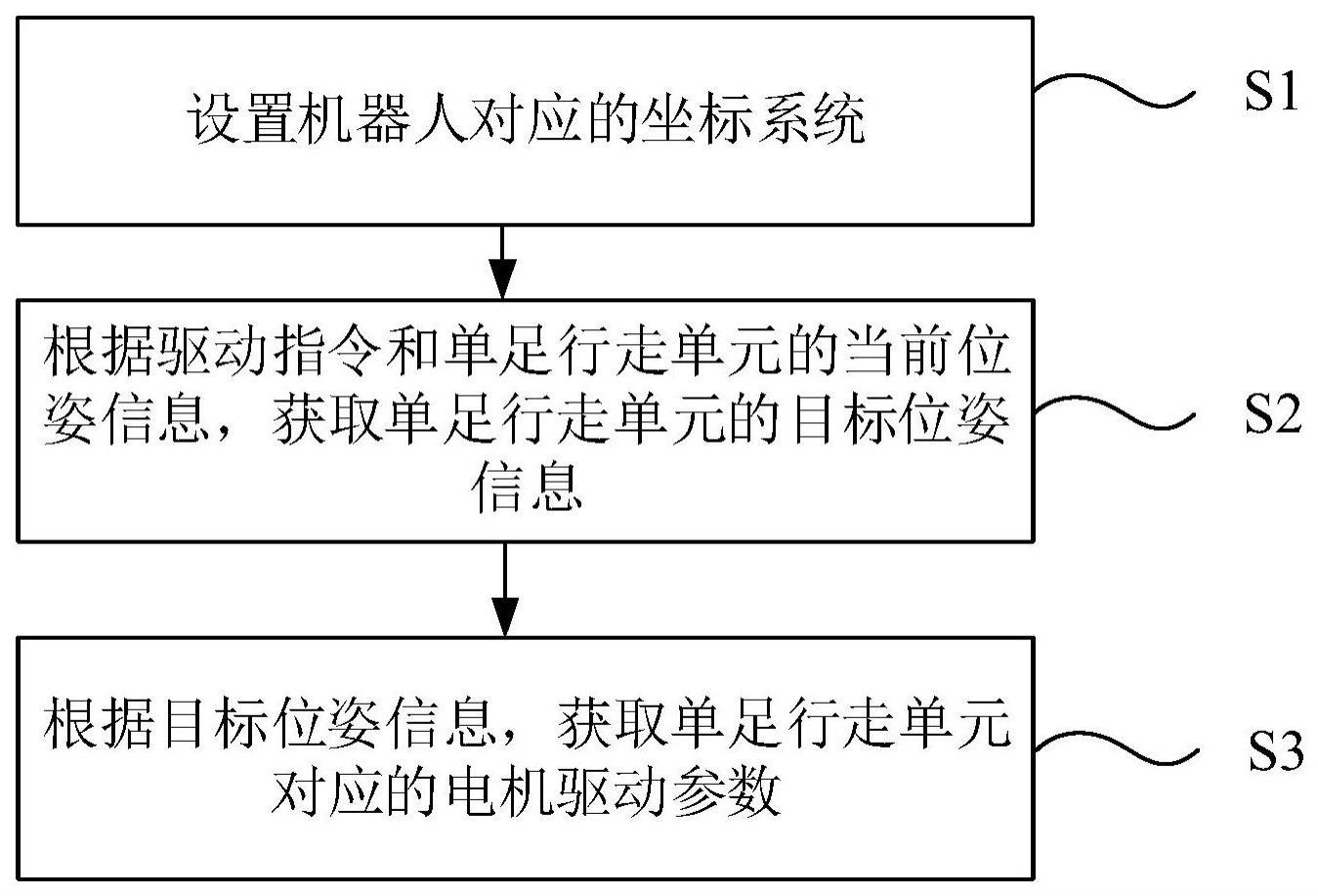
7、本发明还提供了一种机器人的行走装置的控制方法,应用于上述的机器人的行走装置,包括:
8、设置所述机器人对应的坐标系统;
9、根据驱动指令和所述单足行走单元的当前位姿信息,获取所述单足行走单元的目标位姿信息;其中,所述驱动指令、所述当前位姿信息和所述目标位姿信息基于所述坐标系统描述;
10、根据所述目标位姿信息,获取所述单足行走单元对应的电机驱动参数。
11、较佳地,所述坐标系统包括空间基准坐标系、机身坐标系和若干行走坐标系集合;所述设置所述机器人对应的坐标系统的步骤包括:
12、设置所述空间基准坐标系,所述空间基准坐标系在所述机器人的行走过程中不发生变化;
13、设置所述机身坐标系,所述机身坐标系和所述空间基准坐标系用于联合表征所述机器人的空间位姿;
14、分别设置每个所述单足行走单元空间位姿对应的所述行走坐标系集合;所述行走坐标系集合、所述机身坐标系和所述空间基准坐标系用于联合表征所述单足行走单元的空间位姿。
15、较佳地,所述行走坐标系集合包括肩部坐标系、大腿坐标系、小腿坐标系和足端坐标系;其中,所述肩部坐标系对应于所述肩部机构,所述大腿坐标系对应于所述大腿机构,所述小腿坐标系对应于所述小腿机构;所述驱动指令包括足端驱动指令;所述足端驱动指令对应于位于所述小腿机构末端的足端的空间位姿;
16、根据驱动指令和所述单足行走单元的当前位姿信息,获取所述单足行走单元的目标位姿信息的步骤包括:
17、根据所述足端驱动指令和所述本体的当前位姿信息,确定所述足端相对于所述本体的目标位姿信息;
18、所述根据所述目标位姿信息,获取所述单足行走单元对应的电机驱动参数的步骤包括:
19、根据所述足端相对于所述本体的目标位姿信息,对所述足端坐标系、所述小腿坐标系、所述大腿坐标系和所述肩部坐标系进行传递计算,以确定所述单足行走单元中的所述小腿机构、所述大腿机构和所述肩部机构分别对应的目标位姿信息;
20、分别根据所述小腿机构、所述大腿机构和所述肩部机构分别对应的目标位姿信息,确定所述小腿机构和所述大腿机构连接部对应的电机驱动参数、所述大腿机构和所述肩部机构连接部对应的电机驱动参数,以及所述肩部机构和所述本体连接部对应的电机驱动参数。
21、本发明还提供了一种机器人的行走装置的控制系统,应用于上述的机器人的行走装置,包括:
22、坐标系统设置模块,用于设置所述机器人对应的坐标系统;
23、位姿信息获取模块,用于根据驱动指令和所述单足行走单元的当前位姿信息,获取所述单足行走单元的目标位姿信息;其中,所述驱动指令、所述当前位姿信息和所述目标位姿信息基于所述坐标系统描述;
24、驱动参数获取模块,用于根据所述目标位姿信息,获取所述单足行走单元对应的电机驱动参数。
25、较佳地,所述坐标系统包括空间基准坐标系、机身坐标系和若干行走坐标系集合;所述坐标系统设置模块包括:
26、基准坐标设置单元,用于设置所述空间基准坐标系,所述空间基准坐标系在所述机器人的行走过程中不发生变化;
27、机身坐标设置单元,用于设置所述机身坐标系,所述机身坐标系和所述空间基准坐标系用于联合表征所述机器人的空间位姿;
28、单足坐标设置单元,用于分别设置每个所述单足行走单元空间位姿对应的所述行走坐标系集合;所述行走坐标系集合、所述机身坐标系和所述空间基准坐标系用于联合表征所述单足行走单元的空间位姿。
29、较佳地,所述行走坐标系集合包括肩部坐标系、大腿坐标系、小腿坐标系和足端坐标系;其中,所述肩部坐标系对应于所述肩部机构,所述大腿坐标系对应于所述大腿机构,所述小腿坐标系对应于所述小腿机构;所述驱动指令包括足端驱动指令;所述足端驱动指令对应于位于所述小腿机构末端的足端的空间位姿;
30、所述驱动参数获取模块具体用于:根据所述足端驱动指令和所述本体的当前位姿信息,确定所述足端相对于所述本体的目标位姿信息;
31、所述驱动参数获取模块具体用于:
32、根据所述足端相对于所述本体的目标位姿信息,对所述足端坐标系、所述小腿坐标系、所述大腿坐标系和所述肩部坐标系进行传递计算,以确定所述单足行走单元中的所述小腿机构、所述大腿机构和所述肩部机构分别对应的目标位姿信息;
33、分别根据所述小腿机构、所述大腿机构和所述肩部机构分别对应的目标位姿信息,确定所述小腿机构和所述大腿机构连接部对应的电机驱动参数、所述大腿机构和所述肩部机构连接部对应的电机驱动参数,以及所述肩部机构和所述本体连接部对应的电机驱动参数。
34、本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的机器人的行走装置的控制方法。
35、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的机器人的行走装置的控制方法。
36、本发明还提供了一种机器人,其特征在于,包括摄像装置和上述的行走装置及电子设备。
37、本发明的积极进步效果在于:本发明的机器人及其行走装置的控制方法及系统、设备与介质基于灵活可控的机器人行走控制设计,能够结合航空发动机的特点,保证机器人在航空发动机的内腔和流道中自由行走,且单腿四自由度的运动结构能够保证机器人随时调整身体姿态获得更灵活的运动方式。同时,该机器人可以通过单目的摄像头获取航空发动机内部的实际状态,快速检测流道是否有异物,内腔是否有漏油,叶片是否有烧蚀等等状况,辅助发动机的快速健康状态检查。
- 还没有人留言评论。精彩留言会获得点赞!