一种基于移位匹配的载机平台多约束火控方法与流程
1.本发明涉及一种基于移位匹配的载机平台多约束火控方法,属于航空制导武器火控技术领域。
背景技术:
2.红外成像型精确制导武器属于一类复合制导型航空精确制导武器,特别针对空地型红外成像型精确制导武器的具体使用场景,武器飞行过程中遇到如山峦阻碍、或武器飞行过程中要绕开敌方拦截区域的作战场景,因此对武器的火控解算及投放有特定限制。基于此背景,在红外成像型精确制导武器进行目标打击时,针对特定作战场景,需要发明一种多约束的火控算法,从而可以针对作战场景需要,通过作战任务的设计和规划,在火控算法中进行武器的投放约束限制,实现武器按指定设定的飞行高度、飞行速度和攻击范围出现火控投放窗口,实现所涉及的红外成像型型精确制导武器按约束的条件进行投放攻击,保证武器打击的有效性。
3.现有精确制导武器的火控系统中,在针对武器不能投放的飞行速度、飞行高度和攻击区域等范围内,采取的做法是在设计武器火控系统时,直接考虑在火控系统中避免该条件范围,即在设计时采取保守设计方法,直接规避受限制的火控约束条件。这样处理方式简单直接,但缺点是火控系统过于保守,不利于武器系统的灵活、有效使用。
技术实现要素:
4.本发明解决的技术问题是:针对传统精确制导武器在具体使用中,火控系统受到武器的飞行速度、飞行高度和攻击区域等范围限制时,采取的保守设计方法、规避限制条件来实现火控系统计算,造成武器系统使用时的灵活性和有效性不足问题,提出了一种基于移位匹配的载机平台多约束火控方法。
5.本发明解决上述技术问题是通过如下技术方案予以实现的:
6.一种基于移位匹配的载机平台多约束火控方法,包括:
7.测量搭载平台当前航向角,根据航向角获取制导武器挂载状态下的实时航向角;
8.测量搭载平台当前飞行高度,根据飞行高度获取制导武器挂载状态下的实时飞行高度;
9.测量搭载平台当前飞行速度,根据飞行速度获取制导武器挂载状态下的实时飞行速度;
10.通过制导武器挂载状态下的实时航向角、实时飞行高度、实时飞行速度,载入火控系统预设的约束条件,于约束条件下将战场环境的约束限制转换为约束输入变量;
11.确定各约束输入变量的范围,进行火控系统预设的约束条件下的火控系统解算,获取约束条件下的火控投放窗口参数。
12.将制导武器挂载状态下的实时航向角转化为约束输入变量的具体方法为:
13.确定制导武器挂载状态下的航向角范围,将航向角范围进行分段约束,根据当前
航向角,确定分段约束后的区间数。
14.将制导武器挂载状态下的实时飞行高度转化为约束输入变量的具体方法为:
15.确定制导武器挂载状态下的飞行高度范围,将飞行高度范围进行分段约束,根据当前飞行高度,确定分段约束后的区间数。
16.将制导武器挂载状态下的实时飞行速度转化为约束输入变量的具体方法为:
17.确定制导武器挂载状态下的飞行速度范围,将飞行速度范围进行分段约束,根据当前飞行速度,确定分段约束后的区间数。
18.火控系统预设的约束条件包括航向角约束、飞行高度约束、飞行速度约束,在同时满足航向角约束、飞行高度约束、飞行速度约束的情况下,分别确定约束航向角、约束飞行高度、约束飞行速度,计算航向方向允许投放量、最小飞行高度、最小飞行速度,作为约束条件下的火控投放窗口参数。
19.航向角约束中,将航向角区间通过二进制数0或1表示并进行划分,0表示航向角受约束的禁止投放区间,1表示航向角允许投放的区间,设置n个约束航向角值作为判断阈值,以区间形式的二进制约束航向角作为火控解算的航向角输入,进行移位和逻辑运算,其中,移位运算是从最右低位向左进行逐次移位,逻辑运算是将各区间对应的二进制值与0x01进行逻辑“与”运算,按照航向角区间数进行循环预算,直至所有向角区间解算完成,计算出航向方向允许投放范围。
20.飞行高度约束中,设置一个约束飞行高度作为判断阈值,将各飞行高度区间通过二进制数0或1表示,分别确定有飞行高度约束时,各飞行高度区间对应的约束飞行高度的二进制值,将约束飞行高度的二进制值与0x01进行二进制的逻辑“与”运算,仅当结果值为0时,将约束飞行高度的二进制值向左移位,直到结果为1时停止移位计算,移位位数即计算值为0的区间数为被约束的飞行高度区间数,从而计算得到最小飞行高度。
21.飞行速度约束中,设置一个约束飞行速度作为判断阈值,将各飞行速度区间通过二进制数0或1表示,分别确定有飞行速度约束时,各飞行速度区间对应的约束飞行速度的二进制值,将约束飞行速度的二进制值与值0x01进行二进制的逻辑“与”运算,仅当结果值为0时,将约束飞行速度的二进制值向左移位,直到结果为1时停止移位计算,移位位数即计算值为0的区间数为被约束的飞行速度区间数,从而计算得到最小飞行速度。
22.航向方向允许投放量为1时,允许在当前航向角约束下进行航空制导武器投放,航向方向允许投放量为0时,不允许在当前航向角约束下进行航空制导武器投放。
23.一种载机平台多约束火控介质,载机平台多约束火控介质存储有火控程序,火控程序被处理器执行时实现如上述方法的步骤所示。
24.本发明与现有技术相比的优点在于:
25.本发明提供的一种基于移位匹配的载机平台多约束火控方法,针对空地型红外成像型精确制导武器的具体使用场景,在火控算法中设置对于投放方向角的区域、武器投放速度和武器投放高度的多个约束限制,从而解决当前精确制导武器在使用时火控系统受到武器的飞行速度、飞行高度和攻击区域等范围限制,通过采取保守设计火控系统来规避限制条件实现武器火控系统解算,造成武器系统使用时的灵活性和有效性不足问题,实现了复杂作战环境下的多约束火控投放解算,实现了精确制导武器系统的使用灵活性、有效性,大幅提高了武器使用性能。
附图说明
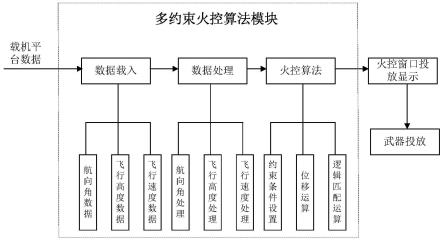
26.图1为发明提供的载机平台多约束火控方法原理图;
27.图2为发明提供的载机平台多约束火控方法流程图;
28.图3为发明提供的火控算法航向角约束实例示意图;
具体实施方式
29.一种基于移位匹配的载机平台多约束火控方法,针对空地型红外成像型精确制导武器的具体使用场景,在火控算法中设置对于投放方向角的区域、武器投放速度和武器投放高度的多个约束限制,从而实现多约束条件下的火控投放解算,具体步骤如下:
30.测量搭载平台当前航向角,根据航向角获取制导武器挂载状态下的实时航向角;
31.测量搭载平台当前飞行高度,根据飞行高度获取制导武器挂载状态下的实时飞行高度;
32.测量搭载平台当前飞行速度,根据飞行速度获取制导武器挂载状态下的实时飞行速度;
33.通过制导武器挂载状态下的实时航向角、实时飞行高度、实时飞行速度,载入火控系统预设的约束条件,于约束条件下将战场环境的约束限制转换为约束输入变量;
34.确定各约束输入变量的范围,进行火控系统预设的约束条件下的火控系统解算,获取约束条件下的火控投放窗口参数。
35.其中,将制导武器挂载状态下的实时航向角转化为约束输入变量的具体方法为:
36.确定制导武器挂载状态下的航向角范围,将航向角范围进行分段约束,根据当前航向角,确定分段约束后的区间数;
37.将制导武器挂载状态下的实时飞行高度转化为约束输入变量的具体方法为:
38.确定制导武器挂载状态下的飞行高度范围,将飞行高度范围进行分段约束,根据当前飞行高度,确定分段约束后的区间数;
39.将制导武器挂载状态下的实时飞行速度转化为约束输入变量的具体方法为:
40.确定制导武器挂载状态下的飞行速度范围,将飞行速度范围进行分段约束,根据当前飞行速度,确定分段约束后的区间数。
41.火控系统预设的约束条件包括航向角约束、飞行高度约束、飞行速度约束,在同时满足航向角约束、飞行高度约束、飞行速度约束的情况下,分别确定约束航向角、约束飞行高度、约束飞行速度,计算航向方向允许投放量、最小飞行高度、最小飞行速度,作为约束条件下的火控投放窗口参数。
42.航向角约束中,将航向范围划分为多个区间,各航向角区间通过二进制数0或1表示,其中0表示航向角受约束的禁止投放区间,1表示航向角允许投放的区间,设置一个或多个约束航向区间作为判断阈值,对应的以区间形式的二进制约束航向角作为火控解算的航向角输入,进行移位和逻辑运算,其中移位运算是从最右低位向左进行逐次移位,逻辑运算是将个区间对应的二进制值与0x01进行逻辑“与”(&)运算,按照航向角区间数进行循环预算,直至整个航向角区间解算完成,计算出航向方向允许投放范围;如图3所示;
43.飞行高度约束中,设置一个约束飞行高度作为判断阈值,将各飞行高度区间通过二进制数0或1表示,分别确定有飞行高度约束时,各飞行高度区间对应的约束飞行高度的
二进制值,将约束飞行高度的与值0x01进行二进制的逻辑“与”(&)运算,仅当结果值为0时,将约束飞行高度的二进制值向左移位,移位位数为被约束的飞行高度区间数,根据移位后二进制值及移位次数计算得到最小飞行高度;
44.飞行速度约束中,设置一个约束飞行速度作为判断阈值,将各飞行速度区间通过二进制数0或1表示,分别确定有飞行速度约束时,各飞行速度区间对应的约束飞行速度的二进制值,将约束飞行速度与0x01进行二进制的逻辑“与”(&)运算,仅当结果值为0时,将约束飞行速度的二进制值向左移位,移位位数为被约束的飞行速度区间数,根据移位后二进制值及移位次数计算最小飞行速度;
45.航向方向区间值允许投放量为1时,允许在当前航向角区间约束下进行航空制导武器投放,航向方向允许投放量为0时,不允许在当前航向角约束下进行航空制导武器投放;
46.当各飞行高度区间对应的约束飞行高度的二进制值、各飞行速度区间对应的约束飞行速度的二进制值,按照从右到左从低位到高位的次序与0x01进行逻辑“与”(&)运算,当结果值为0时,输入的飞行高度区间二进制值继续向左移位进行下一次逻辑“与”运算,直到结果为1时停止移位计算,移位位数即计算值为0的区间数为被约束的区间数,从而得到火控系统约束的最小飞行速度和飞行高度。
47.下面根据具体实施例进行进一步说明:
48.在当前实施例中,利用载机搭载平台挂载制导武器,获取航向角φ、飞行速度v、飞行高度h等信息,结合特定任务场景下所涉及到的各个约束条件,于约束条件下将战场环境的约束限制转换为约束输入变量,具体流程如下:
49.通过搭载的载机平台的惯性装置测得搭载平台当前的航向角φ1,根据搭载的载机平台的航向角得到航空制导武器挂载时的航向信息φ1,并同时获得航空制导武器飞行高度h1、航空制导武器的飞行速度v1;
50.基于航空制导武器挂载中实时的飞行航向角φ1、飞行高度h1和飞行速度信息v1,载入实时飞行数据,结合约束条件将实际的战场环境多个约束限制转化为火控算法的设计输入变量;
51.根据各个约束量范围,采用移位匹配算法,通过移位运算和逻辑匹配,进行多约束条件下的火控解算,得到多约束条件下的参数,展示于火控投放窗口。
52.如图1所示,在本实施例中,假设当前(特定点)飞行状态载机飞行数据为:飞行航向角φ=1.2
°
,飞行高度:h=7500m,飞行速度:v=230m/s;
53.本实施例中具体约束条件为:
54.(1)武器航向方向投放范围:[0
°
,40
°
],[60
°
,120
°
],[140
°
,220
°
],[240
°
,340
°
];
[0055]
(2)武器投放高度:h>6000m;
[0056]
(3)武器投放速度:v>200m/s。
[0057]
该多约束火控算法的流程如图2所示,具体包括以下几个步骤:
[0058]
步骤一:火控系统开始工作后,通过搭载的载机平台的惯性装置测得搭载平台当前的航向角φ2=1.2
°
,根据搭载的载机平台的航向角得到航空制导武器挂载时的航向角信息φ2=1.2
°
;
[0059]
步骤二:通过搭载的载机平台的惯性装置测得搭载平台当前的飞行高度h2=
7500m,根据搭载的载机平台的飞行高度得到挂载时的航空制导武器飞行高度h2=7500m;
[0060]
步骤三:通过搭载的载机平台的惯性装置测得搭载平台当前的飞行速度v2=230m/s,根据搭载的载机平台的飞行速度得到挂载时的航空制导武器的飞行速度v2=230m/s;
[0061]
步骤四:基于前述步骤得到的航空制导武器挂载中实时的飞行航向角φ2、飞行高度h2和飞行速度信息v2,载入实时飞行数据,进行数据处理,其中,投放航向角平均以20
°
划分为一个区间,共计分为18个区间,即:区间1:[0
°
,20
°
),区间2:[20
°
,40
°
),
……
,区间18:[340
°
,360
°
]。根据投放航向角约束条件1,对应的区间3:[40
°
,60
°
),区间7:[120
°
,140
°
),区间12:[220
°
,240
°
)和区间17:[320
°
,340
°
)为不可投放区域,对应火控系统中航向角约束输入值为:0b101111011110111011。飞行高度范围平均以1000米的范围划分为一个区间分为8个区间,即:区间1[4000,5000),区间2[5000,6000),
……
,区间8[11000,12000],根据约束条件2,投放高度约束对应为区间2,即6000米高度以下为武器不可投放区域,对应火控系统中投放高度约束输入值为:“0b11111100”。飞行速度范围平均以20米/秒的范围划分为一个区间,共计分为8个区间,即:区间1为[140,160),区间2为[160,180),
……
,区间8为[280,300]。根据约束条件3,对应为区间3,对应火控系统中投放速度约束输入值为:“0b11111000”。
[0062]
步骤五:根据步骤四中所设计的具体的各个约束量范围,采用移位匹配算法,通过移位运算和逻辑匹配,进行多约束条件下的火控解算,得到多约束条件下的火控投放窗口。其中,航向方向上,在火控算法中进行移位匹配运算中,按照从左到右的次序依次与0x01进行“&”的匹配逻辑运算,其中第3、7、12和17区间的对应位置计算结果为0时,代表航向方向该区域不允许投放,其它区间的对应计算结果为1,代表航向方向这些区域允许投放。同理,飞行高度和飞行速度的移位匹配运算也同航向方向运算过程一样,得到本发明中火控算法中多约束实施例的实际仿真效果,火控系统中采用本方明提出的多约束火控算法,仿真中绿色区域为火控解算出的允许投放区域,武器可进行投放攻击;红色区域为限制约束区域,武器可不能进行投放攻击。
[0063]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0064]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1