一种环境监测智能小车的控制方法及其小车
1.本发明涉及领域,尤其涉及一种环境监测智能小车的控制方法及其小车。
背景技术:
2.医疗行业是我国国民经济的重要组成部分,是传统产业和现代产业相结合, 一、三产业为一体的产业。在医院这个特殊环境里,人流量大,住院病人又是 易感人群,很容易因为环境温度变化引起不适。不同区域的环境对病人的康复 有着至关重要的作用,因此医院环境监测是迫切需要的。医院内部对于环境、 人流、重要病区管制、特殊医疗区域监控以及防盗等有其严格的要求,目前基 于物联网技术的医院监测系统,通过数据采集(通过各种传感器进行采集,例 如温湿度传感器采集医院环境温湿度信息、烟雾传感器采集医院环境烟雾信息 等)、数据传输(有线传输和无线传输,进行数据通信)、数据分析处理(通 过终端服务器将接受的数据分析处理),然而,现在的监控系统监测装置是固 定的,常连接数十台、甚至是数百台的室内环境监测仪器。且构成的监控网络 智能覆盖区域有限,且存在监控视角;再者,只能看到数据、无法及时做出预 警及响应。
技术实现要素:
3.针对现有技术的上述不足,本发明的发明目的是,提供一种环境监测智能 小车的控制方法及其小车,解决现有基于物联网技术的医院检测系统的监测范 围有限性及不可响应的问题。
4.为达到上述发明目的,本发明所采用的技术方案为:
5.包括有如下步骤:
6.s1:设置小车进行周围环境建图的运动轨迹,将小车放在运动轨迹的初始 位置,启动小车上的激光雷达、imu传感器和物联网传感器;利用激光雷达采 集小车行驶过程中的激光雷达建图数据,激光雷达建图数据包括有激光雷达采 集的角度angle和范围range数据;
7.s2:通过小车按照运动轨迹行驶过程中采集的激光雷达建图数据,基于 hector-slam算法建立医院二维地图;同时,利用imu传感器采集小车行驶过 程中的初始位姿q0,确定小车运动过程中自身的位姿α0,以及实现小车定位;
8.s3:通过远程桌面nomachine软件远程查看树莓派中的rviz界面,并根据 医院二维地图信息设定小车的巡逻路径;
9.s4:小车沿设定的巡逻路径行驶,并启动小车和环境检测传感器,使用环 境检测传感器实时将各环境数据通过开源服务云平台onenet传输至网络终端 服务中心进行分析及预警,当传输数据超出设定的阈值,通过设置的语音播报 传感器发出警报,提醒终端处理;
10.s5:当医院的局部地区出现预警时,终端护士站的工作人员收到预警提示 信息后,通过操作远程桌面查看rviz界面内的小车位置信息,确定预警地区的 位置,进行处理。
11.进一步地,步骤s2中医院二维地图的建图与小车定位的方法包括如下步骤:
12.s21:利用hector-slam算法实现实时定位与建图,使用当前帧的激光雷达 数据与已有栅格地图数据构建误差函数;
13.所述hector-slam算法的核心扫描匹配模型为:
[0014][0015][0016][0017]
其中,p
x
和py分别为小车在世界坐标系下的横、纵坐标,为小车基于世界 坐标系y轴旋转的角度;δ为初始或上一时刻小车在世界坐标系下的位姿,δ
*
为 当前优化后小车在世界坐标系下的位姿,si(δ)为激光雷达的扫描端点转换到世 界坐标系的坐标,m(si(δ))为坐标点si(δ)占据栅格地图的占用值,即扫描匹配的 结果;s
k,x
和s
k,y
分别为每一帧每一个激光雷达的扫描端点在激光雷达坐标系下的 横、纵坐标,n代表激光雷达每帧激光扫描点的个数,k为激光雷达扫描端点的 标签,为激光雷达采集的原始数据经过极坐标转换得到,原始数据包括每 一帧的每一个激光扫描端点的角度angle和范围range数据;为 激光雷达坐标系转换到世界坐标系的旋转矩阵,为平移矩阵,由初始位姿α0决定;
[0018]
初始化激光雷达自身的激光雷达坐标系,使世界坐标系、激光雷达坐标系 和栅格地图坐标系三者重合,得到小车的初始位姿δ0,此时imu传感器的初始 位姿q0已知,通过设置权重i选择最终激光雷达的初始位姿α0;
[0019]
α0=(1-i)δ0+iq0[0020]
通过极坐标转换计算第一帧激光雷达扫描数据所有激光点扫描端点在激光 坐标系下的位姿δ
′0,即
[0021]
δ
′0=(range0*cos(angle0),range0*sin(angle0),angle0)
t
[0022]
其中,range0为激光点扫描端点在激光雷达坐标系下的范围数据,angle0为 激光点扫描端点在激光雷达坐标系下的角度数据;
[0023]
获取第二帧的激光雷达建图数据中的角度angle和范围range数据,并将角 度angle和范围range数据进行极坐标转换,计算激光雷达坐标系下第二帧数据 的坐标;根据第二帧激光雷达建图数据相对于第一帧激光雷达建图数据的位姿 增量δα,得到小车第二帧的位姿δ1:
[0024]
δ1=α0+δα
[0025]
imu传感器的位姿q1已知,进一步通过α0=(1-i)δ0+iq0进行位姿数据融 合得到小车此时位姿α1,即α1=(1-i)δ1+iq1;
[0026]
获取第二帧所有激光扫描端点数据在栅格地图坐标系下的坐标;
[0027]
s22:根据相邻两帧所有激光扫描端点匹配误差最小值,计算所有激光扫描 端点
在栅格地图中占用偏差总量的最小值:
[0028][0029]
进一步通过taylor展开为:
[0030][0031]
即:2(m-n*δα)=0
[0032]
对δα进行求导:
[0033][0034][0035][0036]
通过已知初始位姿α0和每一帧所有激光扫描端点的坐标数据计算位 姿增量δα:
[0037]
δ1=α0+δα
[0038]
通过2(m-n*δα)=0计算小车当前优化后的位姿δ1,实现小车定 位。
[0039]
进一步地,步骤s4中的环境检测传感器包括有环境温湿度传感器、空气质 量传感器、温湿度传感器和光照传感器。
[0040]
进一步地,物联网传感器为esp8266物联网传感器;空气质量传感器为 co2、pm2.5传感器;小车的控制板为树莓派开发板。
[0041]
进一步地,包括底板和固定在底板上方的顶板,底板与顶板之间还固定有 外壳前挡板、左侧板、后板和右侧板,底板上设置有若干全向轮和带动全向轮 的全向轮电机。
[0042]
进一步地,底板与顶板之间还设置电机驱动板支撑架,电机驱动板支撑架 与底板之间设置有电池,电机驱动板支撑架上方还固定有电机驱动板和控制板, 电机驱动板和控制板通过若干六角形螺柱固定在底板上。
[0043]
进一步地,电池的外部设置有u型隔板,u型隔板由三块隔板插接组成,u 型隔板的两端与后板固定连接,u型隔板的底部固定在底板上。
[0044]
进一步地,还包括有安装全向轮电机的l形固定板,l形固定板的一段设 置有安装全向轮电机的通孔,全向轮电机固定在通孔内;l形固定板的另一段通 过若干螺钉固定在底板的底侧。
[0045]
进一步地,底板的四周下部外围固定有边侧围板;位于底板前、后侧的边 侧围板为弧形板,弧形板凹向车身前侧;位于底板左、右侧的边侧围板设置有 与l形固定板配合的矩形开口。
[0046]
本发明的有益效果为:
[0047]
1.本发明能够对医院的环境进行大面积覆盖监测。本智能小车平台能够充分 发挥智能小车的灵活性,进行医院大面积覆盖环境监测,解决当前基于互联网 技术的医院检测系统的监测范围有限性问题。实现规划智能小车在不同楼层执 行巡逻任务的路径轨迹,
能够避免禁行区域及有效提高巡逻效率。
[0048]
2.激光雷达实时进行扫描,建立当前医院环境的医院二维地图,激光雷达融 合imu传感器进行定位,能够提供更加精准的智能小车定位信息,从而快速准 确的进行下一步处理。
[0049]
3.本发明的小车结合其控制方法,用于医院环境的巡逻智能监测,可以通过 移动终端移动到医院的指定位置,用于监测医院的实时动态情况,能够实现对 医院环境的多项环境温度的采集,通过物联网传感器进行数据传输,终端通过 数据分析,采用语音播报模块进行危险预报,总站护士通过小车定位系统准确 的知晓环境异常的位置,并及时做出相应处理。
附图说明
[0050]
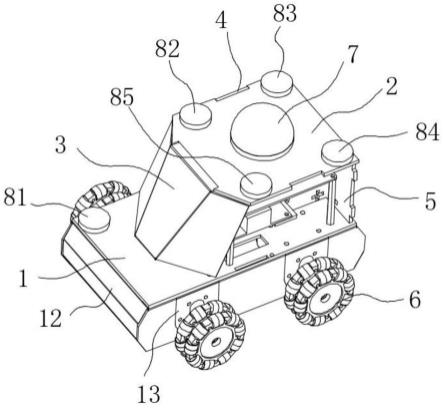
图1为本发明的整体外形示意图;
[0051]
图2为本发明另一个方向的整体外形示意图;
[0052]
图3为本发明的正视图。
[0053][0054]
图中主要部件符号说明如下:
[0055]
1、底板;2、顶板;3、前边侧挡板;4、边侧板;5、后板;6、全向轮;7、 激光雷达;
[0056]
9、控制板;10、电池;11、电机驱动板;12、边侧围板;13、l形固定板;
[0057]
81、超声波传感器;82、物联网传感器;83、imu传感器;84、环境温湿 度传感器;85、空气质量传感器。
具体实施方式
[0058]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理 解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的 普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精 神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保 护之列。
[0059]
环境监测智能小车的控制方法,包括有如下步骤:
[0060]
s1:设置小车进行周围环境建图的运动轨迹,将小车放在运动轨迹的初始 位置,启动小车上的激光雷达、imu传感器和物联网传感器;利用激光雷达采 集小车行驶过程中的激光雷达建图数据,激光雷达建图数据包括有激光雷达采 集的角度angle和范围range数据;
[0061]
s2:通过小车按照运动轨迹行驶过程中采集的激光雷达建图数据,基于 hector-slam算法建立医院二维地图;同时,利用imu传感器采集小车行驶过 程中的初始位姿q0,确定小车运动过程中自身的位姿α0,以及实现小车定位;
[0062]
步骤s2中医院二维地图的建图与小车定位的方法包括如下步骤:
[0063]
s21:利用hector-slam算法实现实时定位与建图,使用当前帧的激光雷达 数据与已有栅格地图数据构建误差函数;
[0064]
所述hector-slam算法的核心扫描匹配模型为:
[0065][0066][0067][0068]
其中,p
x
和py分别为小车在世界坐标系下的横、纵坐标,为小车基于世界 坐标系y轴旋转的角度;δ为初始或上一时刻小车在世界坐标系下的位姿,δ
*
为 当前优化后小车在世界坐标系下的位姿,si(δ)为激光雷达的扫描端点转换到世 界坐标系的坐标,m(si(δ))为坐标点si(δ)占据栅格地图的占用值,即扫描匹配的 结果;s
k,x
和s
k,y
分别为每一帧每一个激光雷达的扫描端点在激光雷达坐标系下的 横、纵坐标,n代表激光雷达每帧激光扫描点的个数,k为激光雷达扫描端点的 标签,为激光雷达采集的原始数据经过极坐标转换得到,原始数据包括每 一帧的每一个激光扫描端点的角度angle和范围range数据;为 激光雷达坐标系转换到世界坐标系的旋转矩阵,为平移矩阵,由初始位姿α0决定;
[0069]
初始化激光雷达自身的激光雷达坐标系,使世界坐标系、激光雷达坐标系 和栅格地图坐标系三者重合,得到小车的初始位姿δ0,此时imu传感器的初始 位姿q0已知,通过设置权重i选择最终激光雷达的初始位姿α0;
[0070]
α0=(1-i)δ0+iq0[0071]
通过极坐标转换计算第一帧激光雷达扫描数据所有激光点扫描端点在激光 坐标系下的位姿δ
′0,即
[0072]
δ
′0=(range0*cog(angle0),range0*sin(angle0),angle0)
t
[0073]
其中,range0为激光点扫描端点在激光雷达坐标系下的范围数据,angle0为 激光点扫描端点在激光雷达坐标系下的角度数据;
[0074]
获取第二帧的激光雷达建图数据中的角度angle和范围range数据,并将角 度angle和范围range数据进行极坐标转换,计算激光雷达坐标系下第二帧数据 的坐标;根据第二帧激光雷达建图数据相对于第一帧激光雷达建图数据的位姿 增量δα,得到小车第二帧的位姿δ1:
[0075]
δ1=α0+δα
[0076]
imu传感器的位姿q1已知,进一步通过α0=(1-i)δ0+iq0进行位姿数据融 合得到小车此时位姿α1,即α1=(1-i)δ1+iq1;
[0077]
获取第二帧所有激光扫描端点数据在栅格地图坐标系下的坐标;
[0078]
s22:根据相邻两帧所有激光扫描端点匹配误差最小值,计算所有激光扫描 端点在栅格地图中占用偏差总量的最小值:
[0079][0080]
进一步通过taylor展开为:
[0081][0082]
即:2(m-n*δα)=0
[0083]
对δα进行求导:
[0084][0085][0086][0087]
通过已知初始位姿α0和每一帧所有激光扫描端点的坐标数据计算位 姿增量δα:
[0088]
δ1=α0+δα
[0089]
通过2(m-n*δα)=0计算小车当前优化后的位姿δ1,实现小车定 位。根据融合后的第二帧时刻小车位姿和已知的第二帧所有的激光点在激光坐 标系下的坐标,获得第二帧所有激光点在栅格地图中的坐标,即世界坐标系中 的坐标,将其即映射到栅格地图中;通过小车不断的移动,imu传感器采集位 姿、激光雷达不断的采集激光雷达数据,使每帧激光雷达采集的所有激光点的 坐标数据映射到栅格地图上形成医院二维地图的轮廓,通过相邻两帧之间不断 的代算求解完成医院二维地图的建立;直到小车运动到预定行驶轨迹的终点, 完成所有帧的激光雷达数据采集;最后完成医院二维地图的建立,同时完成小 车自身的定位。
[0090]
s3:通过远程桌面nomachine软件远程查看树莓派中的rviz界面,并根据 医院二维地图信息设定小车的巡逻路径;
[0091]
s4:小车沿设定的巡逻路径行驶,并启动小车和环境检测传感器,使用环 境检测传感器实时将各环境数据通过开源服务云平台onenet传输至网络终端 服务中心进行分析及预警,当传输数据超出设定的阈值,通过设置的语音播报 传感器发出警报,提醒终端处理;
[0092]
s5:当医院的局部地区出现预警时,终端护士站的工作人员收到预警提示 信息后,通过操作远程桌面查看rviz界面内的小车位置信息,确定预警地区的 位置,进行处理。
[0093]
本实施例中,物联网传感器为esp8266物联网传感器;空气质量传感器为 co2、pm2.5传感器;小车的控制板为树莓派开发板。
[0094]
本实施例中,如图1、2和3所示,图1为拆去右侧板的整体外形示意图, 图3为拆去右侧板的正视图,环境监测智能小车包括底板1和固定在底板1上 方的顶板2,底板1与顶板2之间还固定有外壳前挡板3、左侧板4、后板5和 右侧板,底板上设置有若干全向轮6和带动
全向轮6的全向轮电机。
[0095]
本实施例中,底板1与顶板2之间还设置电机驱动板支撑架,电机驱动板 支撑架与底板1之间设置有电池10,电机驱动板支撑架上方还固定有电机驱动 板11和控制板9,电机驱动板和控制板9通过若干六角形螺柱固定在底板1上。
[0096]
本实施例中,电池10的外部设置有u型隔板,u型隔板由三块隔板插接组 成,u型隔板的两端与后板5固定连接,u型隔板的底部固定在底板1上。
[0097]
本实施例中,小车还包括有安装全向轮电机的l形固定板13,l形固定板 13的一段设置有安装全向轮电机的通孔,全向轮电机固定在通孔内;l形固定 板13的另一段通过若干螺钉固定在底板的底侧。
[0098]
本实施例中,底板1的四周下部外围固定有边侧围板;位于底板1前、后 侧的边侧围板为弧形板,弧形板凹向车身前侧;位于底板1左、右侧的边侧围 板设置有与l形固定板13配合的矩形开口。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1