一种基于移动机器人的辐射环境探测方法和系统
本发明属于机器人辐射探测路径规划领域,具体涉及一种基于移动机器人的辐射环境探测方法和系统。
背景技术:
1、辐射环境探测是核设施运行、辐射应急处理、环境质量监测等研究方向的重要内容。放射性物质在放射性衰变过程中发射出的粒子或射线带来的辐射量超过一定范围就会对环境中的人、物造成影响。因此,为了避免人工进行辐射探测带来的健康损害风险,通过移动机器人、无人机等先进设备搭载辐射探测仪对目标区域进行辐射探测具有重要现实意义。
2、基于移动机器人进行辐射探测时,如何准确地进行移动机器人的路径规划成为首先要考虑的问题。目前已出现一些基于移动机器人的辐射探测可以实现路径自主规划,比如申请号为cn107328418a的发明专利公开了一种移动机器人在陌生室内场景下的核辐射探测路径自主规划方法,其通过全局代价地图生成全局路径规划路线,规划出的路为线蛇形盘管状,将待测区域全部覆盖,但是该路径规划方式主要适用于核设施正常运行时或日常环境质量监测,并不适用于辐射应急处理等场景。
3、核设施发生事故时,需要快速进行周边区域的辐射探测以便快速进行辐射泄漏摸底,为评价事故后果和应急措施决策提供依据。此时需要规划出一条从起点到终点的长度最短的安全无碰撞路径,保障机器人安全快速地进行辐射探测摸底。而现有的移动机器人路径规划方法中,基于群体智能算法的路径规划方式颇受欢迎,但仍然存在易陷入局部最优、稳定性不佳等问题,影响路径规划的准确度,因此需要一种新的移动机器人路径规划方式以适用于辐射应急处理等需要快速进行辐射探测的场景。
技术实现思路
1、有鉴于此,本发明提出了一种基于移动机器人的辐射环境探测方法和系统,用于解决辐射应急处理场景下移动机器人的路径规划方式准确度不高的问题。
2、本发明第一方面,公开了一种基于移动机器人的辐射环境探测方法,用于规划移动机器人的辐射探测路径,所述移动机器人上搭载有环境感知设备和辐射探测仪,所述方法包括:
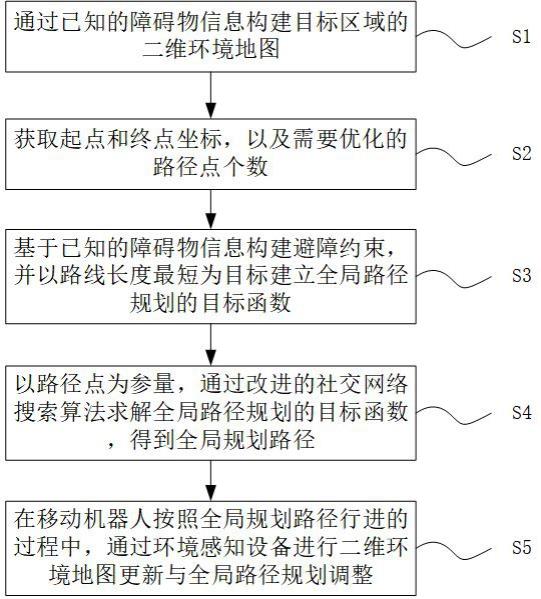
3、通过已知的障碍物信息构建目标区域的二维环境地图;
4、获取起点和终点坐标,以及需要优化的路径点个数;
5、基于已知的障碍物信息构建避障约束,并以路线长度最短为目标建立全局路径规划的目标函数;
6、以路径点为参量,通过改进的社交网络搜索算法求解全局路径规划的目标函数,得到全局最优路径。
7、在以上技术方案的基础上,优选的,所述基于已知的障碍物信息构建避障约束,并以路线长度最短为目标建立全局路径规划的目标函数具体包括:
8、设需要优化的路径点个数为 z,起点和终点坐标分别为( x0, y0)、( x z+1, y z+1),路径点坐标集合为{( x z, y z)| z=1,2,..., z};
9、全局路径规划的目标函数 f的表达式为:
10、
11、其中, ω为惩罚系数, q( t)为避障约束的惩罚函数, t=1,2,…, t, t为障碍物总数, r t为第 t个障碍物的半径,( a t, b t)为第 t个障碍物的圆心坐标, h为安全距离。
12、在以上技术方案的基础上,优选的,所述通过改进的社交网络搜索算法求解全局路径规划的目标函数,得到全局最优路径具体包括:
13、在路径点的解空间内初始化社交网络搜索算法的种群,并将种群作为协作搜索算法的团队;
14、以所述目标函数最小为适应度函数,计算各个个体的适应度,并从中选择适应度较小的m个个体作为领导者;
15、以一定的概率随机选择进入模仿、对话、争论或创新中的任意一种行为模式进行种群位置更新;其中,在对话行为模式中引入协作搜索算法的团队沟通思想进行种群位置更新;
16、重复以上过程并进行迭代运算,直到满足迭代停止条件,输出最优解。
17、在以上技术方案的基础上,优选的,所述在对话行为模式中引入协作搜索算法的团队沟通思想进行种群位置更新具体包括:
18、
19、其中,分别代表从m个领导者中随机选取的一个个体的知识、m个领导者的集体知识、所有个体的集体知识,r表示个体i与随机选择的个体j的交互效果,为第j个个体的第d维数据在第k次次迭代时的位置;
20、分别为第i个个体的第d维数据在第k次、k+1次迭代时的位置,在0~1范围内生成均匀分布的随机数,为m个领导者中随机选取的一个个体的历史最优解, b为从{1,2,…, m}中随机选取的一个序号;为第m个个体的位置,m=1,2,…,m,为第i个个体在第k次迭代时的最优解,i=1,2,…,n,n为种群数量;α、 β为权重调节系数, f i、 f j分别为个体i、j的适应度。
21、在以上技术方案的基础上,优选的,所述以一定的概率随机选择进入模仿、对话、争论或创新中的任意一种行为模式进行种群位置更新的过程中,在争论行为模式中引入基于能力评价的分组学习机制进行位置更新:
22、
23、其中,为个体i的学习能力,通过随机方式更新,l为预设的能力阈值,p为均值为0、方差为1的标准正态分布,为m个领导者的位置均值,λ为取值1或2的常数。
24、在以上技术方案的基础上,优选的,所述以一定的概率随机选择进入模仿、对话、争论或创新中的任意一种行为模式进行种群位置更新的过程中,在创新行为模式中,位置更新公式为:
25、
26、其中 μ(0,1),为服从参数为的莱维分布。
27、在以上技术方案的基础上,优选的,所述方法还包括:
28、在移动机器人按照全局最优路径行进的过程中,通过环境感知设备判断是否出现影响当前全局最优路径的未知障碍物,若是,获取未知障碍物信息,更新目标区域的二维环境地图,以当前位置为起点,重新进行全局路径规划;环境感知设备包括摄像头和激光雷达。
29、本发明第二方面,公开一种基于移动机器人的辐射环境探测系统,所述系统包括:
30、环境地图构建模块:用于通过已知的障碍物信息构建目标区域的二维环境地图;
31、目标函数建立模块:用于获取起点和终点坐标,以及需要优化的路径点个数;基于已知的障碍物信息构建避障约束,并以路线长度最短为目标建立全局路径规划的目标函数;
32、路径规划模块:用于以路径点为参量,通过改进的社交网络搜索算法求解全局路径规划的目标函数,得到全局最优路径;
33、路径调整模块:用于在移动机器人按照全局最优路径行进的过程中,通过环境感知设备判断是否出现影响当前全局最优路径的未知障碍物,若是,获取未知障碍物信息,更新目标区域的二维环境地图,以当前位置为起点,重新进行全局路径规划;环境感知设备包括摄像头和激光雷达。
34、本发明第三方面,公开一种电子设备,包括:至少一个处理器、至少一个存储器、通信接口和总线;
35、其中,所述处理器、存储器、通信接口通过所述总线完成相互间的通信;
36、所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令,以实现如本发明第一方面所述的方法。
37、本发明第四方面,公开一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使计算机实现如本发明第一方面所述的方法。
38、本发明相对于现有技术具有以下有益效果:
39、1)本发明采用移动机器人搭载辐射探测仪进行辐射环境探测,在进行路径规划的过程中,基于已知的障碍物信息构建避障约束,并以路线长度最短为目标建立全局路径规划的目标函数,通过协作搜索算法来改进社交网络搜索算法,形成混合智能优化算法来求解目标函数,在保障求解速度的同时提高解的质量,从而提高辐射探测的效率;
40、2)本发明在社交网络搜索算法的对话行为模式中引入协作搜索算法的团队沟通思想进行种群位置更新,加强个体之间的信息交换,在争论行为模式中引入基于能力评价的分组学习机制进行位置更新,兼顾局部探索和全局开发,以此形成改进的社交网络搜索算法,减少原始的社交网络搜索算法因随机性太强带来的稳定性不佳、易陷入局部最优解的不足,提高算法的稳健性。
41、3)在移动机器人按照全局最优路径行进的过程中,通过环境感知设备判断是否出现影响当前全局最优路径的未知障碍物,并以当前位置为起点重新进行全局路径规划,可以适用于环境发生变化的情况下或者部分环境未知情况下的辐射探测,提高移动机器人辐射探测的鲁棒性和适应性。
- 还没有人留言评论。精彩留言会获得点赞!