一种基于微型导弹的半实物仿真系统和方法与流程
本发明涉及半实物仿真领域。更具体地,涉及一种基于微型导弹的半实物仿真系统和方法。
背景技术:
1、半实物仿真技术可应用于武器系统全生命周期的论证、分析、设计和评估等多个阶段,有效缩短研制周期,降低研发成本,是一种重要的地面仿真验证手段。通过半实物仿真技术,可以及时判断导弹设计的可行性,降低研制周期以及研制成本。在半实物仿真试验中,在实物尚未具备状态,如惯性测量装置、末制导探测装置、舵系统等实物尚未生产或有其他试验使用时,通常使用数学模型来替代。
2、在实现本发明过程中,发明人发现现有技术中至少存在如下问题:在传统的半实物仿真试验中,弹上信息处理器、惯性测量装置分别与仿真主控计算机相连。由于需要在实验室环境中模拟加速度计信息,在弹上信息处理器发出信息采集命令后,通过仿真主控计算机转发信息采集命令给惯性测量装置。仿真主控计算机在接收惯性测量装置的回帧后,将加速度信息替代程仿真主控计算机中的加速度的数学模型计算结果,并转发给弹上信息处理器。然而微型导弹出于低成本考虑,惯性测量装置通常选用mems传感器,该类型传感器与弹上信息处理器集成,没有对外接口,这给半实物仿真试验模拟带来了困难。同时由于微型导弹系统结构设计简单,缺少定位块等装置,在装弹过程中,弹上信息处理器(集成mems传感器)的三个轴均存在安装误差,同时工装安装在转台时也会引入安装误差,这也给半实物仿真试验带来了困难,需要在半实物仿真试验开始前对转台安装误差进行修正。
3、因此,需要提供一种基于微型导弹的半实物仿真系统和方法。
技术实现思路
1、本发明的目的在于提供一种基于微型导弹的半实物仿真系统和方法,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
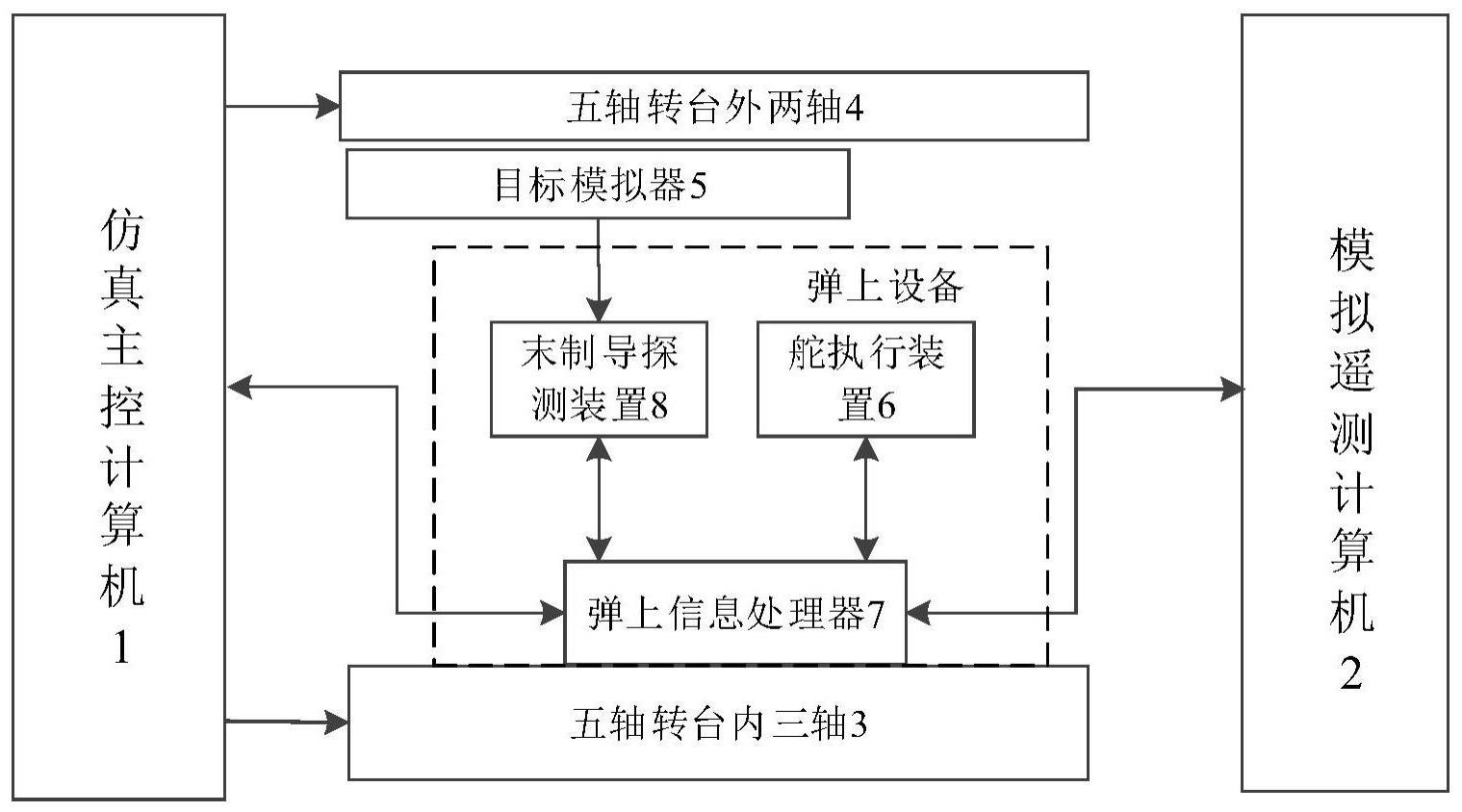
3、本发明第一方面提供一种基于微型导弹的半实物仿真系统,该系统包括仿真主控计算机、弹上设备、模拟遥测计算机和五轴转台,其中,
4、所述仿真主控计算机,用于生成微型导弹的加速度数据,实时解算目标运动,形成转台控制指令;
5、所述弹上设备,用于发送遥测信息,并根据舵指令实现卫星导弹姿态的变化;
6、所述模拟遥测计算机,用于实时接收并解析所述弹上设备发出的遥测数据;
7、所述五轴转台,用于根据所述转台控制指令模拟微型导弹在空中飞行时的姿态运动,形成与真实目标等效的物理环境。
8、可选地,所述弹上设备包括弹上信息处理器、舵执行装置和末制导探测装置,其中,
9、所述弹上信息处理器包括集成mems传感器,用于控制指令计算、发动机点火指令和计算舵执行装置的舵指令;
10、所述舵执行装置,用于接收弹上信息处理器计算的舵指令,通过改变舵偏角,实现导弹姿态的变化;
11、所述末制导探测装置,用于接收目标反射的信息,形成目标视线角。
12、可选地,所述五轴转台包括五轴转台内三轴和五轴转台外两轴,其中,
13、所述五轴转台内三轴包括弹上信息处理器和末制导探测装置,用于模拟导弹在空中飞行时绕弹体坐标系旋转的姿态运动;
14、所述五轴转台外两轴包括目标模拟器,用于提供与弹目相对距离和目标视线角相关的目标特性,形成与真实目标等效的物理环境,所述目标模拟器,用于模拟目标信息。
15、可选地,所述系统还包括供电模块,所述供电模块用于对所述弹上设备供电。
16、本发明第二方面提供一种基于微型导弹的半实物仿真方法,该方法包括
17、根据仿真主控计算机产生的加速度数据,实时解算目标运动,与所述系统的其他设备进行信息交换,根据导弹的姿态与位置形成转台控制指令;
18、根据所述弹上设备计算的舵指令,通过改变舵偏角,实现卫星导弹姿态的变化;
19、通过模拟遥测计算机实时接收并解析所述弹上设备发出的遥测数据;
20、五轴转台根据所述转台控制指令模拟微型导弹在空中飞行时的姿态运动,形成与真实目标等效的物理环境。
21、可选地,所述根据所述弹上设备实现卫星导弹姿态变化包括
22、舵执行装置接收弹上信息处理器对控制指令和舵执行装置的舵指令计算结果,通过改变舵偏角,实现导弹姿态的变化;
23、根据弹上设备中的末制导探测装置接收的目标反射的信息,形成目标视线角。
24、可选地,所述五轴转台包括五轴转台内三轴和五轴转台外两轴,其中,
25、所述五轴转台内三轴包括弹上信息处理器和末制导探测装置,根据所述转台控制指令模拟导弹在空中飞行时绕弹体坐标系旋转的姿态运动;
26、所述五轴转台外两轴包括目标模拟器,根据与弹目相对距离和目标视线角的特性,形成与真实目标等效的物理环境。
27、可选地,所述方法还包括在半实物仿真试验开始前对所述弹上信息处理器和所述末制导探测装置进行误差修正,所述误差修正包括
28、根据误差修正矩阵和转换矩阵得到修正后转台坐标系到弹体坐标系的转移矩阵;
29、根据所述修正后转台坐标系到弹体坐标系的转移矩阵得到五轴转台内三轴的控制角度;
30、将五轴转台处于转台零位状态,得到滚转安装误差角度;
31、根据所述滚转安装误差角度得到俯仰安装误差角度;
32、根据所述滚转安装误差角度和俯仰安装误差角度得到偏航安装误差角度。
33、可选地,所述方法还包括进行微型导弹系统半实物仿真试验,所述半实物仿真试验根据所述弹地通信接口和状态字对弹上设备的参试情况进行试验。
34、本发明的有益效果如下:
35、本发明提供一种基于微型导弹的半实物仿真系统和方法,在试验开展前,利用mems传感器中的加速度计对安装误差进行修正,解决了由于微型导弹通常结构设计简单,装弹过程中无法保证弹体坐标系与转台坐标系完全重合,而带来的初始安装误差问题;在试验进行中,通过使用弹地通信接口进行复用开展半实物仿真试验,解决了由于微型导弹惯性测量装置与弹上信息处理器集成一起,惯性测量装置缺少对外接口,无法使用传统半实物仿真方法开展半实物仿真试验的问题。
技术特征:
1.一种基于微型导弹的半实物仿真系统,其特征在于,该系统包括仿真主控计算机、弹上设备、模拟遥测计算机和五轴转台,其中,
2.根据权利要求1所述的系统,其特征在于,所述弹上设备包括弹上信息处理器、舵执行装置和末制导探测装置,其中,
3.根据权利要求1所述的系统,其特征在于,所述五轴转台包括五轴转台内三轴和五轴转台外两轴,其中,
4.根据权利要求1所述的系统,其特征在于,所述系统还包括供电模块,所述供电模块用于对所述弹上设备供电。
5.一种基于微型导弹的半实物仿真方法,其特征在于,利用权利要求1-4任一权利要求所述的一种基于微型导弹的半实物仿真系统,该方法包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述弹上设备实现卫星导弹姿态变化包括
7.根据权利要求5所述的方法,其特征在于,所述五轴转台包括五轴转台内三轴和五轴转台外两轴,其中,
8.根据权利要求7所述的方法,其特征在于,所述弹上信息处理器包括集成mems传感器,所述集成mems传感器通过复用弹地通信接口与所述仿真主控计算机进行通信,周期性地向仿真主控计算机发送数据采集指令。
9.根据权利要求5所述的方法,其特征在于,所述方法还包括在半实物仿真试验开始前对所述弹上信息处理器和所述末制导探测装置进行误差修正,所述误差修正包括
10.根据权利要求5所述的方法,其特征在于,所述方法还包括进行微型导弹系统半实物仿真试验,所述半实物仿真试验根据所述弹地通信接口和状态字对弹上设备的参试情况进行试验。
技术总结
本发明公开一种基于微型导弹的半实物仿真系统和方法,该系统包括仿真主控计算机,用于生成微型导弹的加速度数据,实时解算目标运动,形成转台控制指令;弹上设备,用于发送遥测信息,并根据舵指令实现卫星导弹姿态的变化;模拟遥测计算机,用于实时接收并解析所述弹上设备发出的遥测数据;五轴转台,用于根据所述转台控制指令模拟微型导弹在空中飞行时的姿态运动,形成与真实目标等效的物理环境。本发明解决了微型导弹系统安装误差以及缺少对外接口对半实物仿真试验的影响。
技术研发人员:刘涛,王晓雷,王智广,刘柏廷
受保护的技术使用者:北京仿真中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!