一种轧线辗道高度驱动调整控制系统的制作方法
本发明涉及轧线辗道调节,具体为一种轧线辗道高度驱动调整控制系统。
背景技术:
1、轧线辗道高度调整是实现轧机辊线辗道的高度精确调整,以确保金属材料在轧制过程中能够达到所需的厚度和尺寸。目前的轧线支撑辊,在对芯棒位进行调整时,采用一台电机驱动大梁对九个辊子实现高度调整,但对单个辊道进行高度调整时,较为困难;同样,在对毛管位进行调整时,采用一台电机驱动前四个辊子,单个辊道调整也较困难。连轧前台的轧线支撑辊,在对芯棒位进行调整时,采用一台电机驱动安装在大梁尾端的蜗轮丝杆减速器对九个轧线辊进行统一高度调整。
2、由于大梁、芯棒位液压缸、轧线辊及传动轴联轴器之间存在装配尺寸差及磨损,致使实际调整过程中,无法保证九个轧线辊高度一致。在调整过程中,经常出现轧线辊高度不一致。需对个别轧线辊进行单独调整作业,但对单个轧线辊进行高度调整时,不仅需要耗费很多的时间,也需要向相关经验的维修人员进行操作,增加了生产成本的投入,为此本发明提出一种轧线辗道高度驱动调整控制系统。
技术实现思路
1、针对现有技术的不足,本发明提供了一种轧线辗道高度驱动调整控制系统,解决了现有技术中的在调整过程中,经常出现轧线辊高度不一致,需对个别轧线辊进行单独调整作业,耗时耗力的问题。
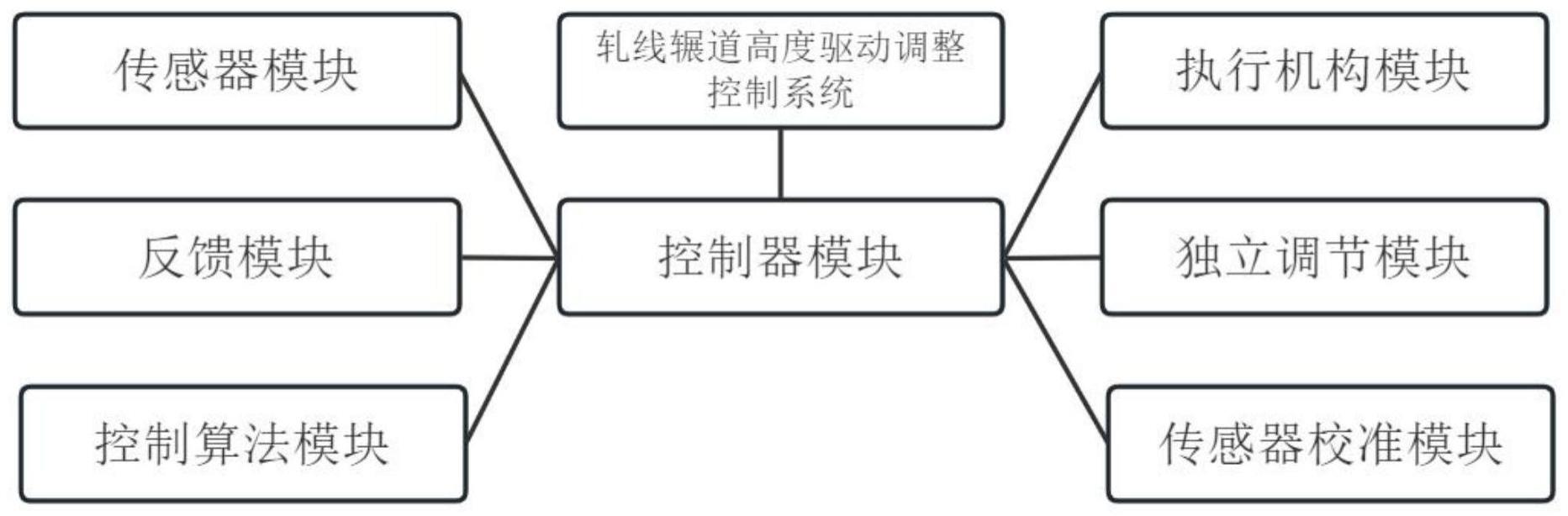
2、为实现以上目的,本发明通过以下技术方案予以实现:一种轧线辗道高度驱动调整控制系统,包括:
3、传感器模块:用于测量轧机辊线辗道的高度或变形,实时获取辗道高度数据;
4、反馈模块:用于接收传感器模块提供地碾道高度数据,并将其反馈给控制系统;
5、控制算法模块:用于根据监测到地碾道高度数据和预设的目标值,计算出调整辗道高度的控制指令;
6、执行机构模块:用于将控制指令转化为实际地碾道高度调整动作;
7、控制器模块:用于接收来自反馈模块地碾道高度数据,通过控制算法模块生成调整指令,并将指令发送给执行机构模块;
8、独立调节模块:用于识别接收的传感器信号和识别发出的控制调整指令,并将指令发送至对应的轧线辗道;
9、传感器校准模块:用于通过与已知准确值进行比较,测量传感器的偏差并进行校准,修正传感器输出的误差。
10、优选的,所述传感器模块包括:
11、位移传感器单元:用于测量轧机辊线辗道的位移或相对位置;
12、压力传感器单元:用于测量轧机辊对辗道施加的压力;
13、角度传感器单元:用于测量轧机辊线辗道的角度或倾斜;
14、变形传感器单元:用于测量轧机辊线辗道的变形情况。
15、优选的,所述反馈模块包括:
16、传感器信号接收单元:用于接收来自传感器模块的信号,将其转换成电信号或数字信号;
17、数据处理单元:用于对传感器信号进行处理和分析,提取所需地碾道高度信息;
18、数据反馈单元:用于接收经过处理地碾道高度数据,并将其反馈给控制系统或控制器;
19、信号转换单元:用于信号的转换、放大和适配,确保传感器信号和控制系统之间的兼容性和传递正常。
20、优选的,所述控制算法模块包括:
21、目标设定单元:用于设定轧线辗道的目标高度或目标变形;
22、反馈控制单元:用于从反馈模块接收到的实时辗道高度数据,与设定目标进行比较,并生成相应的控制指令;
23、控制器调节单元:用于根据设计的控制策略和算法参数进行调整;
24、控制指令生成单元:用于接收反馈控制单元生成的控制指令并进行进一步处理,以生成适合执行机构的调节信号;
25、协调与同步单元:用于确保各个辗道之间的调节和控制协调一致。
26、优选的,所述执行机构模块包括:
27、电动驱动单元:用于提供执行机构的运动和调节能力,并接收控制指令并转化为适当的运动或力输出;
28、机械驱动单元:用于将电动驱动输入转化为有效的机械运动,以实现辊线辗道高度的调整;
29、位置反馈单元:用于监测执行机构的运动或位置信息,并将反馈给控制系统;
30、调节单元:用于调整执行机构的工作状态和特性,以满足辊线辗道高度调整的要求。
31、优选的,所述控制器模块包括:
32、错误检测和校准单元:用于检测控制系统中的错误或偏差,并进行纠正;
33、控制算法实施单元:用于负责实施具体的控制算法;
34、关节控制单元:用于管理和协调系统中的各个模块和单元的工作;
35、控制参数调整单元:用于负责调整控制算法中的参数,以优化系统的性能和响应特性。
36、优选的,所述独立调节模块包括:
37、反馈信号接收单元:用于接收传感器模块的信号并进行中转;
38、反馈信号判断单元:用于判断接收的传感器信号来自哪个独立轧线辗道;
39、执行信号接收单元:用于接收控制算法模块发出的控制指令信号并进行中转;
40、执行信号判断单元:用于根据接收的传感器信号判断该控制指令对应的轧线辗道,进而发送至独立轧线辗道对应的执行机构。
41、优选的,所述传感器校准模块包括:
42、校准标准单元:用于提供已知准确值的设备或标准;
43、校准程序单元:用于执行校准过程中整点校准程序的算法和逻辑;
44、数据采集单元:用于采集传感器的测量值,并将其提供给校准程序单元进行处理;
45、数据比较与处理单元:用于比较传感器测量值和校准标准单元提供的准确值,并计算校准系数或修正值;
46、指令生成和发送单元:用于发送校准指令给传感器,以执行校准过程;
47、温度补偿单元:用于结合传感器的温度测量和校准标准单元提供的准确值,计算出相应的校准系数或修正值,校准传感器在温度变化时的测量误差。
48、优选的,所述传感器校准模块和所述控制器模块之间通过i2c串行接口进行连接,通过数字通信协议与控制器进行数据交换,实现传感器校准所需的数据传输和通信。
49、优选的,所述传感器校准模块和所述传感器模块之间通过采用与传感器本身相匹配的接口和连接方式建立数据链接。
50、工作原理:当轧机辊线碾道开始工作时,传感器模块会实时的监测各个轧线辗道的高度,并将检测的信号传递至反馈模块,通过反馈模块内的数据处理单元和数据反馈单元将信号内的高度信息提取,并进行传递,同时会将信号转换为与控制器模块适配的信号,信号会先进入独立调节模块进行中转,记录信号传递的轧线辗道,之后信号进入控制器模块,再由控制算法模块将接收的信号和预先设定的数据进行对比,判断轧线辗道的高度数据是否准确,当数据不匹配时,会根据计算的误差生成相应的控制指令,发出的控制指令会经独立调节模块进行中转,进而将控制指令精准地发送至出现误差的轧线辗道和其对用的执行机构模块上。接收控制指令后执行机构模块开始工作,通过液压动力对轧线辗道上的支撑辊进行高度的调节,随着支撑辊高度的变化,位置反馈单元会将信息实时地和传感器模块进行同步,随后传感器模块继续执行上述步骤,直至轧线辗道的高度达到预先设定的值。同时随着系统的运行,传感器模块的检测精度也会随着发生偏差,此时传感器校准模块会收集传感器的实时工作数据,并将其传递至控制器模块,随后通过数据比对与处理单元将传感器工作数据和标准数据进行对比,当传感器的工作数据出现偏差时,此时指令生成和发送单元会将调整控制指令发送至传感器模块,将传感器模块的工作数据校准,避免在调节轧线辗道高度时出现误差。
51、本发明提供了一种轧线辗道高度驱动调整控制系统。具备以下有益效果:
52、1、本发明通过传感器模块、独立调节模块和控制算法模块的配合,使得控制系统在调节轧线辗道高度时,能够统一对辗道内的支撑辊进行高度的调节,或是对单一的支撑辊进行调节,降低人工的投入。
53、2、本发明通过独立调节模块、执行机构模块和传感器模块的配合,当轧线辗道内的其中一个或几个支撑辊出现高度偏差时,能够便捷快速地将对应的支撑辊高度调节至预先设定的高度值,不需要工人花费大量的时间和精力去逐一的调整,进而节省出多余的时间对轧线辗道进行点检。
54、3、本发明通过传感器模块、传感器校准模块和控制器模块的配合,使得系统在运行时,能够实时地检测传感器的工作状态,当传感器的工作数据出现变化或偏差时,能够及时地对传感器进行校准,保证轧线辗道高度调节的精准性。
- 还没有人留言评论。精彩留言会获得点赞!