一种基于图像分析的机器人路线规划系统及方法
本发明涉及自动控制,具体而言,涉及一种基于图像分析的机器人路线规划系统及方法。
背景技术:
1、机器人路线规划系统是一种利用计算机技术和传感器数据,为机器人设计和规划合理的移动路径的系统。其目的是让机器人能够在复杂和未知的环境中自主导航,避开障碍物,并在目标点之间高效地移动。这种系统广泛应用于自动驾驶车辆、无人机、服务机器人、工业自动化等领域。
2、传统的基于传感器的方法可以有效帮助机器人避免碰撞障碍物,但这些方法存在着一些局限性。传感器的视野有限,它们只能感知到特定方向和距离范围内的障碍物,而在复杂环境中,传感器难以准确感知这些复杂结构,基于传感器获取的信息无法为机器人路线规划提供有效支持,造成路线规划不合理。无法有效保证机器人躲避障碍。
3、因此,有必要设计一种基于图像分析的机器人路线规划系统及方法用以解决当前机器人路线规划技术中存在的问题。
技术实现思路
1、鉴于此,本发明提出了一种基于图像分析的机器人路线规划系统及方法,旨在解决传统机器人路线规划中复杂环境识别困难,无法保证机器人准确避障的问题。
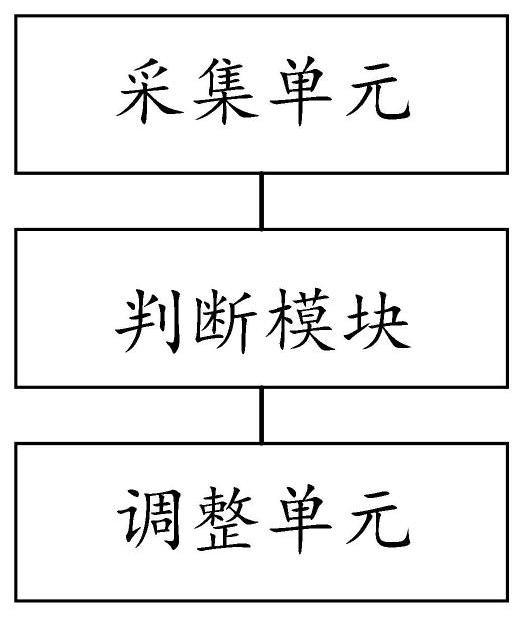
2、一个方面,本发明提出了一种基于图像分析的机器人路线规划系统,包括:
3、采集单元,被配置为采集机器人运行前方的图像信息,根据所述图像信息判断所述机器人的运行方向是否存在障碍物;
4、判断单元,被配置为当所述采集单元判定所述机器人的运行方向存在障碍物时,获取机器人与所述障碍物的实时距离,根据所述实时距离对所述机器人的运行速度进行调整,并根据调整后的运行速度判断所述机器人是否可完成绕行;
5、调整单元,被配置为当所述判断单元判定所述机器人不可完成绕行时,获取所述障碍物的高度尺寸,根据所述高度尺寸判断所述机器人是否可完成翻越;
6、当所述调整单元判定所述机器人可完成翻越时,根据所述障碍物的高度尺寸对调整后的运行速度进行二次调整,并以二次调整后的运行速度完成翻越。
7、进一步的,所述采集单元采集机器人运行前方的图像信息,根据所述图像信息判断所述机器人的运行方向是否存在障碍物,包括:
8、所述采集单元用于根据所述图像信息获取所述机器人对图像信息判断的置信度d1,预先设定置信度阈值d0,根据所述置信度d1与所述置信度阈值d0的比对关系判断所述机器人的运行方向是否存在障碍物;
9、当d1≥d0时,所述采集单元判定所述机器人的运行方向存在障碍物;
10、当d1<d0时,所述采集单元判定所述机器人的运行方向不存在障碍物。
11、进一步的,所述判断单元获取机器人与所述障碍物的实时距离,根据所述实时距离对所述机器人的运行速度进行调整,并根据调整后的运行速度判断所述机器人是否可完成绕行,包括:
12、所述判断单元还用于预先设定第一预设距离l1、第二预设距离l2和第三预设距离l3,且l1<l2<l3;预先设定第一预设速度调整系数a1、第二预设速度调整系数a2和第三预设速度调整系数a3,且a1<a2<a3;根据实时距离l0与各预设距离的大小关系选取速度调整系数对运行速度v0进行调整,获取调整后的运行速度;
13、当l1≤l0<l2时,选取所述第一预设速度调整系数a1对所述运行速度v0进行调整,获取调整后的运行速度v0*a1;
14、当l2≤l0<l3时,选取所述第二预设速度调整系数a2对所述运行速度v0进行调整,获取调整后的运行速度v0*a2;
15、当l3≤l0时,选取所述第三预设速度调整系数a3对所述运行速度v0进行调整,获取调整后的运行速度v0*a3。
16、进一步的,在选取第i预设速度调整系数ai对所述运行速度v0进行调整,获取调整后的运行速度v0*ai后,i=1,2,3,所述判断单元根据调整后的运行速度判断所述机器人是否可完成绕行,还包括:
17、所述判断单元还用于获取所述障碍物的宽度尺寸k0,预先设定第一预设宽度k1、第二预设宽度k2和第三预设宽度k3,且k1<k2<k3;预先设定第一预设转弯角度j1、第二预设转弯角度j2和第三预设转弯角度;
18、根据所述宽度尺寸k0与各预设宽度的大小关系,确定所述机器人的转弯角度;
19、当k1≤k0<k2时,所述判断单元确定所述机器人的转弯角度为j1;
20、当k2≤k0<k3时,所述判断单元确定所述机器人的转弯角度为j2;
21、当k3≤k0时,所述判断单元确定所述机器人的转弯角度为j3。
22、进一步的,所述判断单元在确定所述机器人的转弯角度为j i后,i=1,2,3,根据调整后的运行速度判断所述机器人是否可完成绕行,还包括:
23、所述判断单元还用于根据所述调整后的运行速度v0*ai确定所述机器人的允许转弯角度,根据所述调整后的运行速度v0*ai与标准运行速度vb获取速度差值△v=v0*ai-vb;预先设定第一预设差值△v1、第二预设速度差值△v2和第三预设差值△v3,且△v1<△v2<△v3;预先设定第一预设允许转弯角度jy1、第二预设允许转弯角度jy2和第三预设允许转弯角度jy3,且jy1<jy2<jy3,根据所述速度差值△v与各预设差值的大小关系,确定所述机器人的允许转弯角度;
24、当△v1≤△v<△v2时,所述判断单元确定所述机器人的允许转弯角度为jy3;
25、当△v2≤△v<△v3时,所述判断单元确定所述机器人的允许转弯角度为jy2;
26、当△v3≤△v时,所述判断单元确定所述机器人的允许转弯角度为jy1。
27、进一步的,所述判断单元在确定所述机器人的允许转弯角度为jyi后,i=1,2,3,根据调整后的运行速度判断所述机器人是否可完成绕行,还包括:
28、所述判断单元还用于比对所述转弯角度j i和允许转弯角度jyi,i=1,2,3,根据比对结果判断所述机器人是否可完成绕行;
29、当j i>jy i时,所述判断单元判定所述机器人不可完成绕行;
30、当j i≤jy i时,所述判断单元判定所述机器人可完成绕行。
31、进一步的,当所述判断单元判定所述机器人不可完成绕行时,所述调整单元获取所述障碍物的高度尺寸,根据所述高度尺寸判断所述机器人是否可完成翻越,包括:
32、所述调整单元还用于预先设定第一预设高度h1;根据高度尺寸h0与所述第一预设高度h1的大小关系,判断所述机器人是否可完成翻越;
33、当h0≥h1时,所述调整单元判定所述机器人不可完成翻越;
34、当h0<h1时,所述调整单元判定所述机器人可完成翻越。
35、进一步的,当所述调整单元判定所述机器人可完成翻越时,根据所述障碍物的高度尺寸对调整后的运行速度进行二次调整,并以二次调整后的运行速度完成翻越,包括:
36、所述调整单元还用于预先设定第二预设高度h2和第三预设高度h3,且h1>h2>h3;
37、根据所述高度尺寸h0与各预设高度的大小关系,选取速度调整系数对所述调整后的运行速度v0*ai进行二次调整,获取二次调整后的运行速度。
38、进一步的,所述调整单元根据所述高度尺寸h0与各预设高度的大小关系,选取速度调整系数对所述调整后的运行速度v0*ai进行二次调整,获取二次调整后的运行速度,包括
39、当h0<h3时,选取所述第三预设速度调整系数a3对所述调整后的运行速度v0*ai进行二次调整,获取二次调整后的运行速度v0*ai*a3;
40、当h3≤h0<h2时,选取所述第二预设速度调整系数a2对所述调整后的运行速度v0*ai进行二次调整,获取二次调整后的运行速度v0*ai*a2;
41、当h2≤h0<h1时,选取所述第一预设速度调整系数a1对所述调整后的运行速度v0*ai进行二次调整,获取二次调整后的运行速度v0*ai*a1。
42、与现有技术相比,本发明的有益效果在于:通过图像分析,机器人可以获得更丰富的环境信息,包括障碍物的位置、大小、类型等,从而实现对复杂结构和不可见障碍物的感知,弥补了传感器视野有限的问题。判断单元在采集单元判定机器人的运行方向存在障碍物时,实时获取机器人与障碍物的距离,并根据距离对机器人的运行速度进行调整。这种动态调整速度的策略可以确保机器人在遇到障碍物时及时减速,避免碰撞,并且在遇到不同距离的障碍物时做出适当反应,提高了机器人的安全性和避障效果。当判断单元判定机器人无法完成绕行时,调整单元会获取障碍物的高度尺寸,并根据高度尺寸判断机器人是否有能力完成翻越。如果机器人具备翻越能力,调整单元将对之前调整的运行速度进行二次调整,以适应翻越操作。系统实现了在障碍物无法绕行时的备选方案,进一步提高了机器人的适应性和灵活性。
43、另一方面,本发明还提出了一种基于图像分析的机器人路线规划方法,包括:
44、步骤s100:采集机器人运行前方的图像信息,根据所述图像信息判断所述机器人的运行方向是否存在障碍物;
45、步骤s200:当判定所述机器人的运行方向存在障碍物时,获取机器人与所述障碍物的实时距离,根据所述实时距离对所述机器人的运行速度进行调整,并根据调整后的运行速度判断所述机器人是否可完成绕行;
46、步骤s300:当所述机器人不可完成绕行时,获取所述障碍物的高度尺寸,根据所述高度尺寸判断所述机器人是否可完成翻越;
47、当判定所述机器人可完成翻越时,根据所述障碍物的高度尺寸对调整后的运行速度进行二次调整,并以二次调整后的运行速度完成翻越。
48、可以理解的是,上述基于图像分析的机器人路线规划方法及系统具备相同的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!