一种多无人机勘察路径规划方法、装置、介质和设备与流程
本发明涉及无人机勘察,尤其涉及一种多无人机勘察路径规划方法、装置、介质和设备。
背景技术:
1、灾害勘察是一直以来需要重点关注的问题,受灾地区由于面积广、受灾点多、受灾情况多变等等,在大多数情况下需要多个无人机进行协同勘察,在协同勘察中就会出现无人机勘察路径重复、杂乱,无人机需勘察的区域划分不清晰等问题,导致勘察时间过长;且由于无人机的巡航距离是有限的,如勘察路径规划规划不合理或是杂乱随机,则会导致勘察时间被大量的消耗。
技术实现思路
1、基于此,有必要针对上述问题,提出一种多无人机勘察路径规划方法、装置、介质和设备,以使多台无人机协同勘察时的路径得以被准确高效的规划,进而缩短勘察时间。
2、在第一方面,本发明提供一种多无人机勘察路径规划方法,所述方法包括:
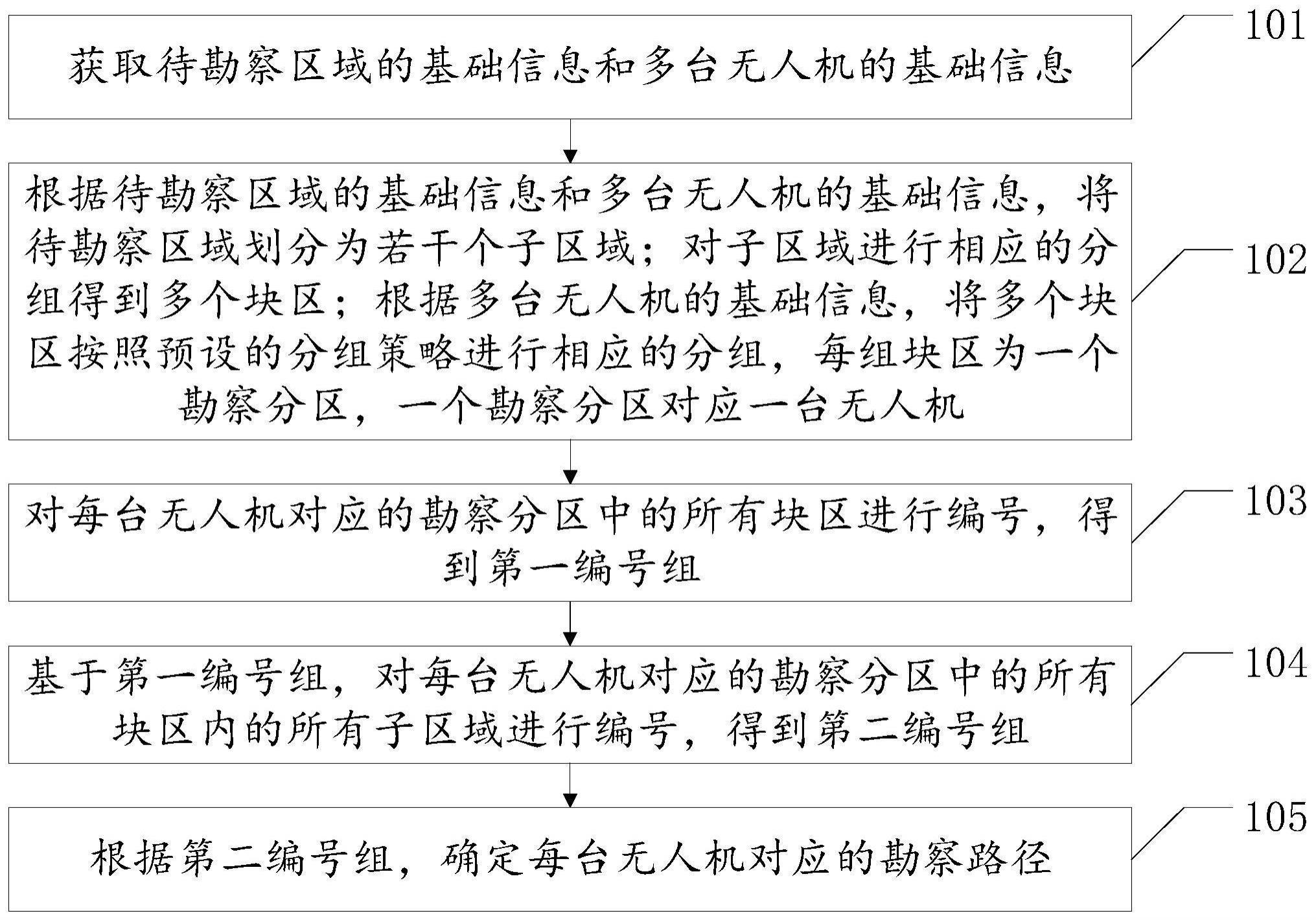
3、获取待勘察区域的基础信息和多台无人机的基础信息;
4、根据所述待勘察区域的基础信息和多台无人机的基础信息,将所述待勘察区域划分为若干个子区域;对所述子区域进行相应的分组得到多个块区;根据所述多台无人机的基础信息,将所述多个块区按照预设的分组策略进行相应的分组,每组块区为一个勘察分区,所述一个勘察分区对应一台无人机;
5、对每台无人机对应的勘察分区中的所有块区进行编号,得到第一编号组;
6、基于所述第一编号组,对所述每台无人机对应的勘察分区中的所有块区内的所有子区域进行编号,得到第二编号组;
7、根据所述第二编号组,确定所述每台无人机对应的勘察路径。
8、可选的,所述多台无人机的基础信息中包括无人机的视野范围,所述待勘察区域的基础信息中包括待勘察区域的面积;
9、所述根据所述待勘察区域的基础信息和多台无人机的基础信息,将所述待勘察区域划分为若干个子区域,具体包括:根据所述待勘察区域的面积和所述无人机的视野范围,将所述待勘察区域划分为若干个子区域;
10、所述对所述子区域进行相应的分组得到多个块区,具体包括:在所述若干个子区域中,按照指定的组合规则,将一定个数的子区域组合为一个块区,重复执行前述步骤直至所有的子区域被组合,得到多个块区;所有块区的总面积大于等于所述待勘察区域的面积。
11、可选的,所述预设的分组策略具体包括:
12、优先选择到达所述一个块区中心耗时最短的无人机作为所述块区对应的无人机;若到达所述块区中心耗时相同,则获取每台无人机的块区关联量,选择块区关联量最低的无人机作为所述块区对应的无人机;根据每个块区对应的无人机,得到每台无人机对应的一组块区;
13、获取每台无人机勘察其对应的一组块区的勘察总耗时,确定所述勘察总耗时符合无人机续航时间,则结束分组。
14、可选的,所述勘察分区为包含内角的多边形形状,所述对每台无人机对应的勘察分区中的所有块区进行编号,得到第一编号组,包括:
15、在所述一个勘察分区中,确定距离所述勘察分区对应的无人机的起飞位置最近的块区为起始块区,从所述起始块区开始编号;判断所述起始块区是否在所述勘察分区的内角位置;
16、若所述起始块区不在所述勘察分区的内角位置,则以所述起始块区为起始点,向所述勘察分区内距离所述起始块区最近的内角方向顺序编号,编到所述最近的内角后再按照s型编号规则依次对剩余块区进行编号;若所述起始块区在所述勘察分区的内角位置,则按照s型编号规则依次对剩余块区进行编号;得到所述一个勘察分区中的所有块区的所有编号;
17、重复上述步骤,得到所述每台无人机对应的勘察分区中的所有块区的全部编号,所述所有块区的全部编号构成第一编号组。
18、可选的,所述基于所述第一编号组,对所述每台无人机对应的勘察分区中的所有块区内的所有子区域进行编号,得到第二编号组,包括:
19、确定所述每个勘察分区中的每个块区内的起始子区域和终点子区域;
20、基于所述起点子区域和终点子区域在所述每个块区内作路径规划,基于在所述每个块区内作的路径规划得到多个勘察重叠率,在所述多个勘察重叠率中选取勘察重叠率最低的路径作为所述每个块区的最优路径;
21、基于所述最优路径和所述第一编号组,确定所述每个块区内的所有子区域的所有编号;
22、重复上述步骤,得到所述每台无人机对应的勘察分区中的所有块区内的所有子区域的全部编号,所述所有子区域的全部编号构成第二编号组。
23、可选的,所述确定所述每个勘察分区中的每个块区内的起始子区域和终点子区域,具体包括:
24、在所述一个勘察分区的起始块区中,确定距离所述无人机的起飞位置最近的子区域为起始子区域;
25、在所述一个勘察分区的最后一个编号块区内,选取距离所述无人机的起飞位置最近的子区域为终点子区域;
26、在所述一个勘察分区的最后一个编号块区或每个剩余块区中,确定距离上一个编号块区的终点子区域距离最近的子区域为起始子区域;
27、在所述一个勘察分区的起始块区或每个剩余块区中,选取与下一个编号块区相邻的子区域为终点子区域,若所述相邻的子区域不止一个,则将所有相邻的子区域作为备选终点子区域,分别以所述每个备选终点子区域为终点子区域作所述起始块区或每个剩余块区的路径规划,得到所述每个备选终点子区域对应的勘察重叠率,选取所述勘察重叠率最低的备选终点子区域为最终的终点子区域。
28、可选的,所述多台无人机的基础信息还包括无人机的飞行高度范围,所述方法还包括:
29、计算所述每台无人机对应的勘察分区内每个子区域的中点坐标,结合所述飞行高度范围,分别构建所述每个子区域对应的三维坐标;
30、所述根据所述第二编号组,确定所述每台无人机对应的勘察路径,具体包括:
31、基于所述第二编号组中每个子区域的编号和所述每个子区域对应的三维坐标,生成每个子区域的三维坐标序列,所述三维坐标序列为所述每台无人机对应的勘察路径。
32、在第二方面,本发明提供一种多无人机勘察路径规划装置,所述装置包括:
33、获取模块,用于获取待勘察区域的基础信息和多台无人机的基础信息;
34、确定区域模块,用于根据所述待勘察区域的基础信息和多台无人机的基础信息,将所述待勘察区域划分为若干个子区域;对所述子区域进行相应的分组得到多个块区;根据所述多台无人机的基础信息,将所述多个块区按照预设的分组策略进行相应的分组,每组块区为一个勘察分区,所述一个勘察分区对应一台无人机;
35、第一编号模块,用于对每台无人机对应的勘察分区中的所有块区进行编号,得到第一编号组;
36、第二编号模块,用于基于所述第一编号组,对所述每台无人机对应的勘察分区中的所有块区内的所有子区域进行编号,得到第二编号组;
37、确定勘察路径模块,用于根据所述第二编号组,确定所述每台无人机对应的勘察路径。
38、在第三方面,本发明提供一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,使得所述处理器执行如上述方法中的任一步骤。
39、在第四方面,本发明提供一种计算机设备,包括存储器和处理器,其特征在于,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述方法中的任一步骤。
40、采用本发明实施例,具有如下有益效果:
41、本发明提供了一种多无人机勘察路径规划方法,该方法包括:获取待勘察区域的基础信息和多台无人机的基础信息;根据待勘察区域的基础信息和多台无人机的基础信息,将待勘察区域划分为若干个子区域;对子区域进行相应的分组得到多个块区;根据多台无人机的基础信息,将多个块区按照预设的分组策略进行相应的分组,每组块区为一个勘察分区,一个勘察分区对应一台无人机;对每台无人机对应的勘察分区中的所有块区进行编号,得到第一编号组;基于第一编号组,对每台无人机对应的勘察分区中的所有块区内的所有子区域进行编号,得到第二编号组;根据第二编号组,确定每台无人机对应的勘察路径。本发明通过将待勘察区域依次由小到大的划分为子区域、块区、勘察分区,使得可以在勘察分区内分层进行多无人机路径规划,第一层是对勘察分区内的块区进行初步路径规划,第二层是继续对块区内的子区域进行具体的路径规划;这种分层路径规划思想使得多台无人机的路径重叠率大大下降,且勘察路径清晰明了,有效的缩短了无人机的勘察时间。
- 还没有人留言评论。精彩留言会获得点赞!