无人机的控制方法、情感状态的确定方法和无人机系统与流程
本技术涉及无人机,具体而言,涉及一种无人机的控制方法、情感状态的确定方法、无人机的控制装置、情感状态的确定装置和无人机系统。
背景技术:
1、目前传统无人机的控制方法通常仅依赖于用户通过遥控器下发的速度和高度,不具备对用户情感状态的感知和响应能力。
2、现有技术中的无人机控制方法中无人机的电源设备的输出功率通常是预定的,不具备对用户情感需求的感知和响应能力。
技术实现思路
1、本技术的主要目的在于提供一种无人机的控制方法、情感状态的确定方法、无人机的控制装置、情感状态的确定装置和无人机系统,以至少解决目前传统无人机的控制方法通常仅依赖于用户通过遥控器下发的速度和高度,不具备对用户情感状态的感知和响应能力的问题。
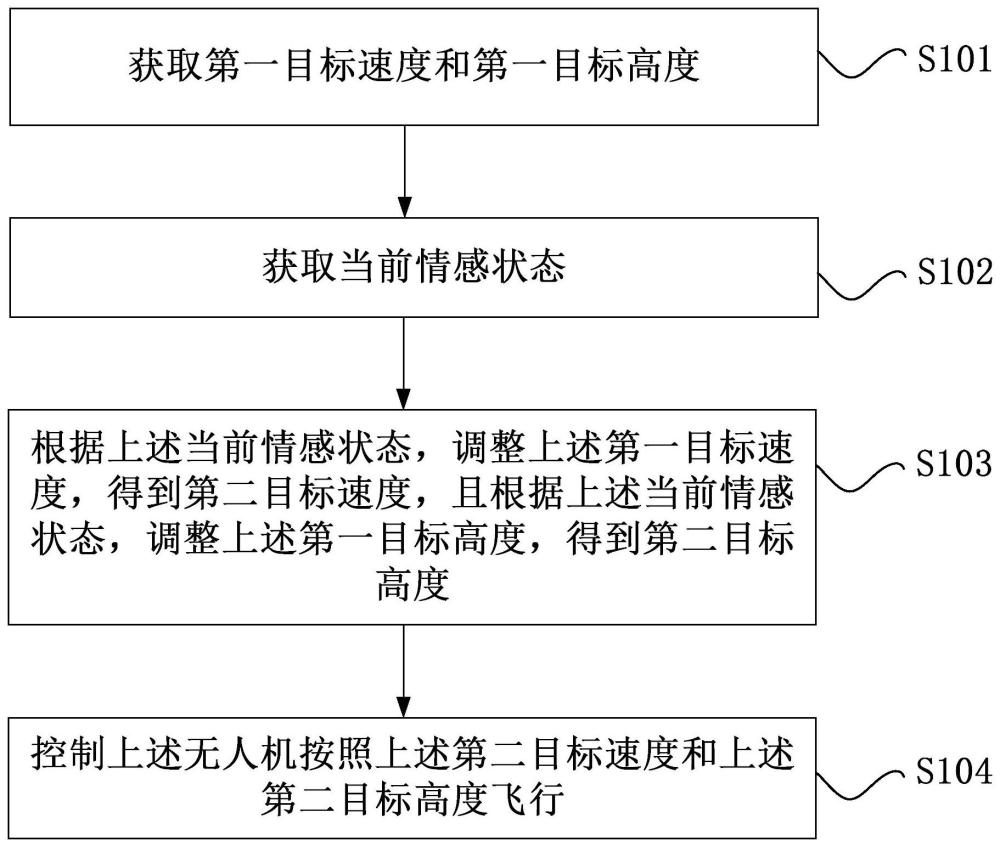
2、为了实现上述目的,根据本技术的一个方面,提供了一种无人机的控制方法,所述方法包括:获取第一目标速度和第一目标高度,所述第一目标速度为当前时刻下遥控器下发的控制指令中无人机的速度,所述第一目标高度为所述当前时刻下所述遥控器下发的所述控制指令中的所述无人机的高度;获取当前情感状态,所述当前情感状态为用户在所述当前时刻的情感状态,所述情感状态为以下之一:积极、偏积极、中性、偏消极、消极;根据所述当前情感状态,调整所述第一目标速度,得到第二目标速度,且根据所述当前情感状态,调整所述第一目标高度,得到第二目标高度,调整规则为:所述情感状态越消极所述无人机的速度越慢,所述情感状态越消极所述无人机的高度越低;控制所述无人机按照所述第二目标速度和所述第二目标高度飞行。
3、可选地,根据所述当前情感状态,调整所述第一目标速度,得到第二目标速度,且根据所述当前情感状态,调整所述第一目标高度,得到第二目标高度,包括:根据所述当前情感状态和第一映射关系,确定第一目标变化量,且根据所述当前情感状态和第二映射关系,确定第二目标变化量,所述第一映射关系为所述用户的所述情感状态和所述无人机的速度的变化量之间的映射关系,所述第一目标变化量为所述第一映射关系中所述当前情感状态对应的所述无人机的速度的变化量,所述第一映射关系的规则为:所述情感状态越消极所述无人机的速度越慢,所述第二映射关系为所述用户的所述情感状态和所述无人机的高度的变化量之间的映射关系,所述第二目标变化量为所述第二映射关系中所述当前情感状态对应的所述无人机的高度的变化量,所述第二映射关系的规则为:所述情感状态越消极所述无人机的高度越低;计算所述第一目标速度与所述第一目标变化量的和,得到所述第二目标速度,且计算所述第一目标高度与所述第二目标变化量的和,得到所述第二目标高度。
4、可选地,控制所述无人机按照所述第二目标速度和所述第二目标高度飞行,包括:获取当前速度和当前高度,所述当前速度为所述当前时刻下所述无人机的速度,所述当前高度为所述当前时刻下所述无人机的高度;确定第三目标变化量和第四目标变化量,所述第三目标变化量为所述第二目标速度与所述当前速度的差值,所述第四目标变化量为所述第二目标高度与所述当前高度的和;获取多个当前转速,一个所述当前转速为所述当前时刻下所述无人机的一个电机的转速;根据所述第三目标变化量、所述第四目标变化量和第三映射关系,确定多个第五目标变化量,所述第三映射关系为所述无人机的速度的变化量、所述无人机的高度的变化量和所述无人机的各所述电机的转速的变化量之间的映射关系,一个所述第五目标变化量为所述第三映射关系中一个目标变化量组合对应的一个所述电机的转速,一个所述目标变化量组合包括一个所述第三目标变化量和一个所述第四目标变化量,所述第五目标变化量与所述当前转速一一对应;计算所述当前转速与对应的所述第五目标变化量的和,得到多个目标转速,所述目标转速与所述当前转速一一对应;控制各所述电机按照对应的目标转速转动。
5、可选地,在获取当前情感状态之后,所述方法还包括:获取当前输出功率,所述当前输出功率为所述当前时刻下所述无人机的电源设备的输出功率;根据所述当前情感状态和第四映射关系,确定第六目标变化量,所述第四映射关系为所述用户的所述情感状态和所述无人机的电源设备的输出功率的变化量之间的映射关系,所述第六目标变化量为所述第四映射关系中所述当前情感状态对应的所述无人机的电源设备的输出功率的变化量,所述第四映射关系的规则为:所述情感状态越消极所述电源设备的所述输出功率越小;计算所述当前输出功率与所述第六目标变化量的和,得到目标功率;将所述电源设备的输出功率调整至所述目标功率。
6、根据本技术的另一个方面,提供了一种情感状态的确定方法,所述方法包括:在用户操控无人机的过程中,获取当前音频数据和当前图像数据,所述当前音频数据为所述用户在当前时刻的语音的音频数据,所述当前图像数据为所述用户在所述当前时刻的面部的图像数据;将所述当前音频数据和所述当前图像数据输入到情感预测模型,得到当前情感状态,所述情感预测模型通过采用多组历史数据训练神经网络得到的,所述多组历史数据中的每一组所述历史数据均包括历史时段内获取的:所述用户的语音的音频数据、所述用户的面部的图像数据、所述用户的所述情感状态。
7、可选地,所述情感预测模型包括:语音分析模型、图像分析模型和特征融合模型,所述语音分析模型用于提取所述当前音频数据的特征向量,所述图像分析模型用于提取所述当前图像数据的特征向量,所述特征融合模型用于至少根据所述当前音频数据的特征向量和所述当前图像数据的特征向量确定所述当前情感状态。
8、可选地,所述情感预测模型还包括:语音识别模型,所述语音识别模型用于提取所述当前音频数据的文本的特征向量,所述特征融合模型用于根据所述当前音频数据的特征向量、所述当前图像数据的特征和所述当前音频数据的文本的特征向量确定所述当前情感状态。
9、根据本技术的再一个方面,提供了一种无人机的控制装置,所述装置包括:第一获取单元,用于获取第一目标速度和第一目标高度,所述第一目标速度为当前时刻下遥控器下发的控制指令中无人机的速度,所述第一目标高度为所述当前时刻下所述遥控器下发的所述控制指令中的所述无人机的高度;第二获取单元,用于获取当前情感状态,所述当前情感状态为用户在所述当前时刻的情感状态,所述情感状态为以下之一:积极、偏积极、中性、偏消极、消极;调整单元,用于根据所述当前情感状态,调整所述第一目标速度,得到第二目标速度,且根据所述当前情感状态,调整所述第一目标高度,得到第二目标高度,调整规则为:所述情感状态越消极所述无人机的速度越慢,所述情感状态越消极所述无人机的高度越低;控制单元,用于控制所述无人机按照所述第二目标速度和所述第二目标高度飞行。
10、根据本技术的又一个方面,提供了一种情感状态的确定装置,所述装置包括:第三获取单元,用于在用户操控无人机的过程中,获取当前音频数据和当前图像数据,所述当前音频数据为所述用户在当前时刻的语音的音频数据,所述当前图像数据为所述用户在所述当前时刻的面部的图像数据;确定单元,用于将所述当前音频数据和所述当前图像数据输入到情感预测模型,得到当前情感状态,所述情感预测模型通过采用多组历史数据训练神经网络得到的,所述多组历史数据中的每一组所述历史数据均包括历史时段内获取的:所述用户的语音的音频数据、所述用户的面部的图像数据、所述用户的所述情感状态。
11、根据本技术的一个方面,提供了一种无人机系统,包括:摄像模块,用于实现任意一种所述的无人机的控制方法;遥控器,所述遥控器与所述摄像模块通信连接;无人机,所述无人机包括:控制模块,所述控制模块与所述遥控器通信连接,所述控制模块用于实现任意一种所述的情感状态的确定方法。
12、应用本技术的技术方案,通过上述实施例,首先,获取当前时刻遥控器下发的无人机的速度以及当前时刻遥控器下发的无人机的高度,之后,获取用户在当前时刻的情感状态,然后,基于情感状态越消极无人机的速度越慢,情感状态越消极无人机的高度越低的调整规则,根据用户在当前时刻的情感状态调整当前时刻遥控器下发的无人机的速度以及当前时刻遥控器下发的无人机的高度,得到第二目标速度和第二目标高度,最后,控制无人机按照第二目标速度和第二目标高度飞行,即本技术控制无人机按照根据用户的情感状态调整遥控器下发的无人机的速度以及高度得到的第二目标速度和第二目标高度飞行,从而解决了目前传统无人机的控制方法通常依赖于用户通过遥控器下发的速度和高度,不具备对用户情感状态的感知和响应能力,该方法解决了目前传统无人机的控制方法通常仅依赖于用户通过遥控器下发的速度和高度,不具备对用户情感状态的感知和响应能力的问题。
- 还没有人留言评论。精彩留言会获得点赞!