一种环形轨道RGV运动控制方法与流程
本发明涉及rgv控制,具体涉及一种环形轨道rgv运动控制方法。
背景技术:
1、rgv又称为有轨穿梭小车,是一种实现厂内物流智能化和无人化的运输设备,能够在固定轨道上自动运行并自动完成取货、卸货任务。按照轨道布局形式,通常可分为直线往复式、分段式和环形式三种,直线往复式占用空间最小,搬运效率介于分段式和环形式之间。因此,在大多数的无人车间和无人仓库,环形式rgv往往成为空间限制和搬运效率要求下的折中选择。
2、在环型轨道中,每辆rgv小车能够沿环型轨道同方向循环行驶,并且可以在中间任意地点停靠。因此,对于多台rgv小车同时运行的情况,在转弯过程中的运动控制会面临rgv小车运行效率低、控制精度低,以及相邻两车相互等待而引发停止运行的问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种环形轨道rgv运动控制方法,能够有效克服现有技术所存在的转弯过程中的运动控制面临运行效率低、控制精度低,以及容易引发停止运行的缺陷。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、一种环形轨道rgv运动控制方法,rgv调度系统接收下发的任务控制指令,并向rgv小车的任务控制单元分配rgv小车任务;
6、任务控制单元根据分配的rgv小车任务,结合环形轨道上其他rgv小车的运行情况,通过切换指令对rgv小车的控制模式进行切换,控制rgv小车完成与控制模式对应的运动动作以执行自动运行任务。
7、优选地,所述任务控制单元根据分配的rgv小车任务,结合环形轨道上其他rgv小车的运行情况,通过切换指令对rgv小车的控制模式进行切换,包括:
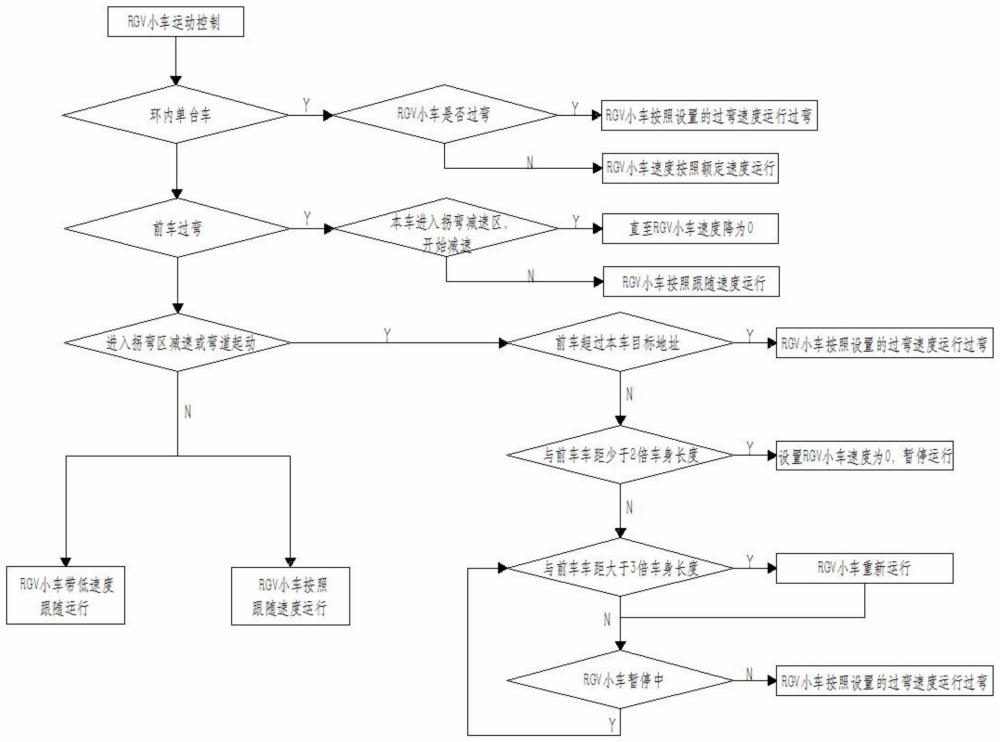
8、任务控制单元对rgv小车进行运动控制,当环形轨道内只有单台车运行时,判断rgv小车是否过弯;
9、如果rgv小车过弯,则控制rgv小车按照设置的过弯速度运行过弯,否则控制rgv小车按照额定速度运行。
10、优选地,当环形轨道内有多台车运行,且前车过弯时,判断本车是否进入拐弯减速区,开始减速;
11、如果本车进入拐弯减速区,开始减速,则控制rgv小车速度降为0,否则控制rgv小车按照跟随速度运行。
12、优选地,当环形轨道内有多台车运行,且前车不过弯,同时本车进入拐弯减速区或弯道启动时,判断前车是否超过本车目标地址;
13、如果前车超过本车目标地址,则控制rgv小车按照设置的过弯速度运行过弯,否则判断与前车车距是否少于两倍车身长度;
14、如果与前车车距少于两倍车身长度,则控制rgv小车速度为0,暂停运行,否则判断与前车车距是否大于三倍车身长度;
15、如果与前车车距大于三倍车身长度,则控制rgv小车重新运行,当与前车车距不大于三倍车身长度时或控制rgv小车重新运行后,判断rgv小车是否处于暂停状态;
16、如果rgv小车处于暂停状态,则重新判断与前车车距大于三倍车身长度,否则控制rgv小车按照设置的过弯速度运行过弯。
17、优选地,当环形轨道内有多台车运行,且前车不过弯,同时本车没有进入拐弯减速区或弯道启动时,控制rgv小车进行带低速度跟随运行,或控制rgv小车按照跟随速度运行。
18、优选地,所述rgv小车任务包括自动运行任务和维护任务,所述自动运行任务包括rgv小车任务触发条件和rgv小车任务运行,所述rgv小车任务运行包括直线运行和转弯运行。
19、优选地,所述维护任务的执行过程,包括:
20、当rgv小车需要维护保养或出现故障需要维修时,rgv小车的任务控制单元接收rgv调度系统分配的维护任务;
21、当rgv小车维护保养或故障维修完成时,rgv小车手动运行至环形轨道中,rgv小车的任务控制单元继续接收rgv调度系统分配的rgv小车任务。
22、优选地,所述环形轨道内的rgv小车通过无线网络进行实时通信,所述rgv小车通过输送线与rgv调度系统进行实时通信以接收分配的rgv小车任务。
23、(三)有益效果
24、与现有技术相比,本发明所提供的一种环形轨道rgv运动控制方法,能够有效解决环形轨道rgv在转弯、直行过程中面临的rgv小车运行效率低、控制精度低,以及相邻两车相互等待而引发停止运行的问题,最大限度保证了rgv小车的运行效率和rgv停止运行时对停车精度的要求,是一种能够充分满足工业需求,且成本更低的环形轨道rgv运动控制方法。
技术特征:
1.一种环形轨道rgv运动控制方法,其特征在于:rgv调度系统接收下发的任务控制指令,并向rgv小车的任务控制单元分配rgv小车任务;
2.根据权利要求1所述的环形轨道rgv运动控制方法,其特征在于:所述任务控制单元根据分配的rgv小车任务,结合环形轨道上其他rgv小车的运行情况,通过切换指令对rgv小车的控制模式进行切换,包括:
3.根据权利要求2所述的环形轨道rgv运动控制方法,其特征在于:当环形轨道内有多台车运行,且前车过弯时,判断本车是否进入拐弯减速区,开始减速;
4.根据权利要求3所述的环形轨道rgv运动控制方法,其特征在于:当环形轨道内有多台车运行,且前车不过弯,同时本车进入拐弯减速区或弯道启动时,判断前车是否超过本车目标地址;
5.根据权利要求4所述的环形轨道rgv运动控制方法,其特征在于:当环形轨道内有多台车运行,且前车不过弯,同时本车没有进入拐弯减速区或弯道启动时,控制rgv小车进行带低速度跟随运行,或控制rgv小车按照跟随速度运行。
6.根据权利要求1-5中任意一项所述的环形轨道rgv运动控制方法,其特征在于:所述rgv小车任务包括自动运行任务和维护任务,所述自动运行任务包括rgv小车任务触发条件和rgv小车任务运行,所述rgv小车任务运行包括直线运行和转弯运行。
7.根据权利要求6所述的环形轨道rgv运动控制方法,其特征在于:所述维护任务的执行过程,包括:
8.根据权利要求7所述的环形轨道rgv运动控制方法,其特征在于:所述环形轨道内的rgv小车通过无线网络进行实时通信,所述rgv小车通过输送线与rgv调度系统进行实时通信以接收分配的rgv小车任务。
技术总结
本发明涉及RGV控制,具体涉及一种环形轨道RGV运动控制方法,RGV调度系统接收下发的任务控制指令,并向RGV小车的任务控制单元分配RGV小车任务;任务控制单元根据分配的RGV小车任务,结合环形轨道上其他RGV小车的运行情况,通过切换指令对RGV小车的控制模式进行切换,控制RGV小车完成与控制模式对应的运动动作以执行自动运行任务;本发明提供的技术方案能够有效克服现有技术所存在的转弯过程中的运动控制面临运行效率低、控制精度低,以及容易引发停止运行的缺陷。
技术研发人员:姜跃君,王焘
受保护的技术使用者:安歌科技(六安)有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!