卫星太阳翼故障处理方法、相关装置及存储介质与流程
本技术实施例涉及卫星设计,尤其涉及一种卫星太阳翼故障处理方法、相关装置及存储介质。
背景技术:
1、对于非太阳同步轨道卫星,考虑到轨道光照情况复杂,通常采用太阳翼驱动机构来保障太阳翼光照实现太阳翼有效的对日定向。传统太阳翼驱动机构由机构部分、电子学部分组成。其中,机构部分负责在给定的驱动信息下控制电子的转动。电子学部前端处理部分根据太阳翼驱动机构内的驱动电机、谐波减速齿轮及轴系的设计处理驱动控制指令,给出角度信号等。电子学后端部分主要实现数字量与硬信号之间的转换,实现与星务计算机的通信,进行单机故障管理等。机电产品角度测量的常用方式有光栅码盘、旋转变压器和电位器等,由于角度测试方式难以进行备份,一般采用异构备份方法,即在太阳翼上配备数字太阳敏感器,当角度传感器故障时或太阳翼卡死时,可采用数字太阳敏感器确认太阳翼位置。
2、在对现有技术的研究和实践过程中,本技术实施例的发明人发现,虽然上述采用异构备份方法有一定的可靠性,但是成本高、质量和体积较大,为降低成本,部分太阳翼驱动装置仅保留核心步进驱动功能与零位传感功,并使用低成本的霍尔传感器配合磁钢实现零位检测,但霍尔传感器零位较宽,且对温度敏感,不同温度下零位宽度变化较大,综合精度较低,所以导致当机构故障时通过太阳翼上的数字太阳敏感器难以确定太阳翼位置。
技术实现思路
1、本技术实施例提供了一种卫星太阳翼故障处理方法、相关装置及存储介质,能够提高零位识别精度。利用整星进行太阳翼状态辅助定位。将控制逻辑集中于星务软件,实现任务管理与故障判断,故障隔离等功能,综合保障太阳翼驱动机构的高可靠、高精度应用。
2、第一方面,本技术实施例提供一种卫星太阳翼故障处理方法,该方法包括:
3、所述方法用于卫星,所述卫星包括太阳翼,其特征在于,太阳翼上部署驱动机构、零位传感器;驱动电路集成于星务计算组件,与驱动电路对应的控制逻辑集成与星务计算程序;所述方法包括:
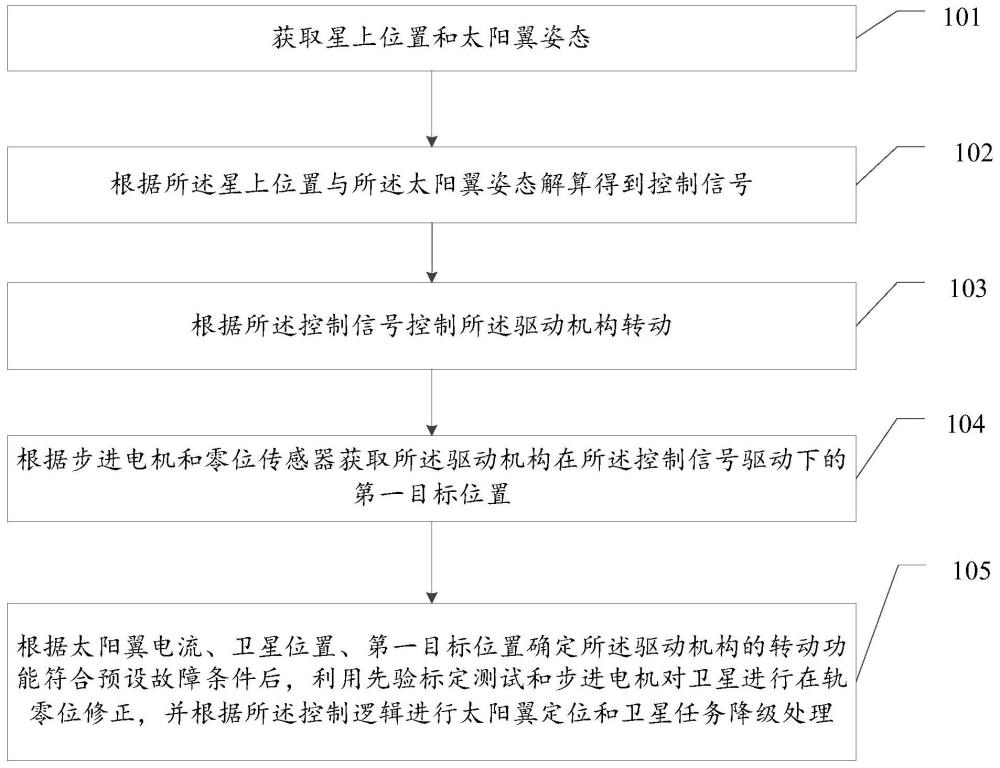
4、获取星上位置和太阳翼姿态;
5、根据所述星上位置与所述太阳翼姿态解算得到控制信号,所述控制信号用于指示驱动控制步数、驱动控制方向;
6、根据所述控制信号控制所述驱动机构转动;
7、根据步进电机和零位传感器获取所述驱动机构在所述控制信号驱动下的第一目标位置;
8、根据太阳翼电流、卫星位置、所述第一目标位置确定所述驱动机构的转动功能符合预设故障条件后,
9、利用先验标定测试和步进电机对卫星进行在轨零位修正,并根据所述控制逻辑进行太阳翼定位和卫星任务降级处理。
10、一些实施方式中,所述根据所述控制信号控制所述驱动机构转动,包括:
11、获取太阳翼的第二目标位置,所述第二目标位置根据数字零位、步进方向与步进步数得到;
12、根据所述第二目标位置,驱动步进电机进行转动计步;
13、若根据所述步进电机转动的计步确定所述步进电机在零位后,则记录所述步进电机转动当圈的零位宽度并更新零位宽度;
14、在太阳翼的驱动机构进入零位后的预宽度时进行转动步数清零;
15、根据步进步数得到所述太阳翼当前的理论位置;
16、当根据太阳翼电流信号和卫星位置确定所述驱动机构符合预设故障条件后,将所述理论位置设为所述目标位置;并根据预设的太阳翼输出、环境温度与太阳翼姿态的对应关系,对太阳翼的实时位置进行粗定位,得到初始位置;
17、基于所述初始位置,利用步进电机和零位传感器对太阳翼的驱动机构进行重定位,得到所述第一目标位置。
18、一些实施方式中,所述预设故障条件为长期不过零位故障模式时,根据太阳翼电流信号和卫星位置确定步进电机驱动机构符合预设故障条件,包括:
19、获取当前地面标定的步进电机整圈步数;
20、若根据所述步进电机整圈步数,确定星务计算机计步超过预设门限的次数高于预设的第一次数,则确定所述驱动机构为长期不过零故障。
21、一些实施方式中,所述根据所述星上位置与所述太阳翼姿态解算得到控制信号,包括:
22、根据卫星位置、所述太阳翼姿态、太阳的实时位置,得到所述驱动机构的实时位置;
23、根据所述实时位置与所述第二目标位置得到所述控制信号,所述控制信号指示驱动控制步数、驱动控制方向。
24、一些实施方式中,所述方法还包括:
25、根据卫星长期在轨姿态和太阳翼安装位置,确定当太阳翼初始展开时太阳翼的采光面位置;
26、将所述采光面位置设置为与默认零位重合,或设置为有定固定夹角,并将设置后的所述采光面位置作为太阳翼初始位置。
27、一些实施方式中,所述方法还包括:
28、获取梯度监测零位宽度与中心点偏移数据,以及根据在轨工况得到默认零位宽度;
29、根据所述梯度监测零位宽度与所述中心点偏移数据绘制监测表格;
30、根据所述监测表格获取卫星入轨前的零位宽度中位值,将所述零位宽度中位值作为默认零位中心点;
31、对步进电机进行步数标定;
32、对单组太阳翼的不同角度的入射光照进行标定,以标定太阳翼在不同光照条件下的输出效率分布。
33、第二方面,本技术实施例提供一种卫星太阳翼故障处理装置,具有实现对应于上述第一方面提供的卫星太阳翼故障处理方法的功能。功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,模块可以是软件和/或硬件。
34、一些实施方式中,所述卫星太阳翼故障处理装置包括:
35、收发模块,用于获取星上位置和太阳翼姿态;
36、处理模块,用于根据所述星上位置与所述太阳翼姿态解算得到控制信号,所述控制信号用于指示驱动控制步数、驱动控制方向;
37、根据所述控制信号控制所述驱动机构转动;
38、根据步进电机和零位传感器获取所述驱动机构在所述控制信号驱动下的第一目标位置;
39、根据太阳翼电流、卫星位置、所述第一目标位置确定所述驱动机构的转动功能符合预设故障条件后,利用先验标定测试和步进电机对卫星进行在轨零位修正,并根据所述控制逻辑进行太阳翼定位和卫星任务降级处理。
40、一些实施方式中,所述处理模块具体用于:
41、获取太阳翼的第二目标位置,所述第二目标位置根据数字零位、步进方向与步进步数得到;
42、根据所述第二目标位置,驱动步进电机进行转动计步;
43、若根据所述步进电机转动的计步确定所述步进电机在零位后,则记录所述步进电机转动当圈的零位宽度并更新零位宽度;
44、在太阳翼的驱动机构进入零位后的预宽度时进行转动步数清零;
45、根据步进步数得到所述太阳翼当前的理论位置;
46、当根据太阳翼电流信号和卫星位置确定所述驱动机构符合预设故障条件后,将所述理论位置设为所述目标位置;并根据预设的太阳翼输出、环境温度与太阳翼姿态的对应关系,对太阳翼的实时位置进行粗定位,得到初始位置;
47、基于所述初始位置,利用步进电机和零位传感器对太阳翼的驱动机构进行重定位,得到所述第一目标位置。
48、一些实施方式中,所述预设故障条件为长期不过零位故障模式时,所述处理模块具体用于:
49、获取当前地面标定的步进电机整圈步数;
50、若根据所述步进电机整圈步数,确定星务计算机计步超过预设门限的次数高于预设的第一次数,则确定所述驱动机构为长期不过零故障。
51、一些实施方式中,所述处理模块具体用于:
52、根据卫星位置、所述太阳翼姿态、太阳的实时位置,得到所述驱动机构的实时位置;
53、根据所述实时位置与所述第二目标位置得到所述控制信号,所述控制信号指示驱动控制步数、驱动控制方向。
54、一些实施方式中,所述处理模块还用于:
55、根据卫星长期在轨姿态和太阳翼安装位置,确定当太阳翼初始展开时太阳翼的采光面位置;
56、将所述采光面位置设置为与默认零位重合,或设置为有定固定夹角,并将设置后的所述采光面位置作为太阳翼初始位置。
57、一些实施方式中,所述处理模块还用于:
58、获取梯度监测零位宽度与中心点偏移数据,以及根据在轨工况得到默认零位宽度;
59、根据所述梯度监测零位宽度与所述中心点偏移数据绘制监测表格;
60、根据所述监测表格获取卫星入轨前的零位宽度中位值,将所述零位宽度中位值作为默认零位中心点;
61、对步进电机进行步数标定;
62、对单组太阳翼的不同角度的入射光照进行标定,以标定太阳翼在不同光照条件下的输出效率分布。
63、第三方面,本技术实施例提供一种计算机设备,所述计算机设备包括:至少一个处理器和存储器;其中,所述存储器用于存储计算机程序,所述处理器用于调用所述存储器中存储的计算机程序来执行上述第一方面、第一方面的任一种实施方式中的步骤。
64、第四方面,本技术实施例提供一种计算机可读存储介质,具有实现对应于上述第一方面提供的卫星太阳翼故障处理方法的功能。所述功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,所述模块可以是软件和/或硬件。具体的,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本技术实施例中第一方面、第一方面的任一种实施方式中的步骤。
65、相较于现有技术,本技术实施例提供的方案中,获取星上位置和太阳翼姿态,根据所述星上位置与所述太阳翼姿态解算得到控制信号,所述控制信号用于指示驱动控制步数、驱动控制方向;根据所述控制信号控制所述驱动机构转动;根据步进电机和零位传感器获取所述驱动机构在所述控制信号驱动下的第一目标位置;根据太阳翼电流、卫星位置确定所述驱动机构的转动功能符合预设故障条件后,利用先验标定测试和步进电机对卫星进行在轨零位修正,并根据所述控制逻辑进行太阳翼定位和卫星任务降级处理。采用本方案,一方面,能够提高零位识别精度,利用整星进行太阳翼状态辅助定位。另一方面,将控制逻辑集中于星务软件,实现任务管理与故障判断,故障隔离等功能。由此可见,本方案能够综合保障太阳翼驱动机构的高可靠、高精度应用。
- 还没有人留言评论。精彩留言会获得点赞!