一种机器人的移动控制系统、方法和机器人与流程
本发明涉及机器人移动控制的,尤其涉及一种机器人的移动控制系统、方法和机器人。
背景技术:
1、在履带式底盘移动设备/机器人的实际需求中,不同场景会产生不同的需求,比如外部环境和定位精度导致定位导航方式的不同,底盘驱动功率导致底盘驱动模式的差异等,每个需求的变动都将使产品重新设计和重新开发。每个需求的变更都需要耗费高昂的人力成本进行重新开发,开发周期长,产品稳定性不能得到保障。
2、因此,如何提高机器人在不同场景下移动控制的适用性,是目前亟待解决的技术问题。
技术实现思路
1、本发明提供的一种机器人的移动控制系统、方法和机器人,提高了机器人在不同移动控制场景下的适用性。
2、本发明实施例提供了以下方案:
3、第一方面,本发明实施例提供了一种机器人的移动控制系统,系统包括:
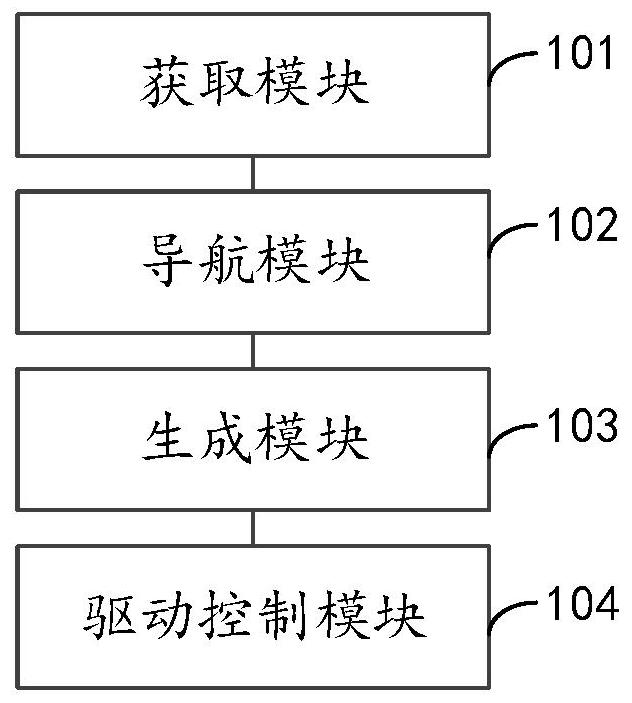
4、获取模块,用于获取机器人的移动任务的起点位置和终点位置,以及移动任务的安全等级和速度等级;
5、导航模块,用于根据安全等级配置路径计算模型;以及根据起点位置、终点位置和路径计算模型,获得移动任务的目标路径;
6、生成模块,用于根据速度等级配置轨迹点计算模型;以及根据目标路径和轨迹点计算模型,获得目标路径上所有轨迹点的行驶速度;
7、驱动控制模块,用于根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务。
8、在一种可选的实施例中,系统还包括:
9、定位模块,用于根据机器人的感知器件的器件信息配置位置计算模型,以及根据感知器件输入的感知数据和位置计算模型,获得机器人的感知位置;
10、导航模块还用于根据感知位置更新目标路径。
11、在一种可选的实施例中,感知器件包括激光雷达、相机、gps定位器、北斗定位器、rfid读卡器和二维码读卡器中的一种。
12、在一种可选的实施例中,系统还包括:
13、逆运动分解模块,用于根据机器人的驱动电机数量配置逆分解计算模型,以及根据行驶速度和逆分解计算模型,获得机器人每个驱动电机的行驶速度。
14、在一种可选的实施例中,系统还包括:
15、反馈矫正模块,用于根据机器人的路径移动精度配置反馈计算模型,以及根据目标路径中已行驶轨迹点的行驶偏差和反馈计算模型,更新目标路径中未行驶轨迹点的行驶速度。
16、在一种可选的实施例中,反馈矫正模块还用于根据机器人的感知位置和预设传感器的反馈位置的位置偏差,获得行驶偏差。
17、在一种可选的实施例中,预设传感器包括里程计、惯性导航传感器和磁导航传感器中的一种。
18、第二方面,本发明实施例还提供了一种机器人的移动控制方法,方法包括:
19、获取机器人的移动任务的起点位置和终点位置,以及移动任务的安全等级和速度等级;
20、根据安全等级配置路径计算模型,以及根据速度等级配置轨迹点计算模型;
21、根据起点位置、终点位置和路径计算模型,获得移动任务的目标路径;
22、根据目标路径和轨迹点计算模型,获得目标路径上所有轨迹点的行驶速度;
23、根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务。
24、在一种可选的实施例中,根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务之前,方法还包括:
25、根据机器人的感知器件的器件信息配置位置计算模型;
26、根据感知器件输入的感知数据和位置计算模型,获得机器人的感知位置;
27、根据感知位置更新目标路径。
28、在一种可选的实施例中,根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务之前,方法还包括:
29、根据机器人的驱动电机数量配置逆分解计算模型;
30、根据行驶速度和逆分解计算模型,获得机器人每个驱动电机的行驶速度。
31、在一种可选的实施例中,根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务之前,方法还包括:
32、根据机器人的路径移动精度配置反馈计算模型;
33、根据目标路径中已行驶轨迹点的行驶偏差和反馈计算模型,更新目标路径中未行驶轨迹点的行驶速度。
34、在一种可选的实施例中,根据目标路径中已行驶轨迹点的行驶偏差和反馈计算模型,更新目标路径中未行驶轨迹点的行驶速度之前,方法还包括:
35、根据机器人的感知位置和预设传感器的反馈位置的位置偏差,获得行驶偏差。
36、第三方面,本发明实施例还提供了一种机器人,机器人包括第一方面中任一的移动控制系统。
37、本发明的一种机器人的移动控制系统、方法和机器人与现有技术相比,具有以下优点:
38、本发明的机器人移动控制系统包括获取模块、导航模块、生成模块和驱动控制模块;获取模块用于获取机器人的移动任务的起点位置和终点位置,以及移动任务的安全等级和速度等级;导航模块用于根据安全等级配置路径计算模型;以及根据起点位置、终点位置和路径计算模型,获得移动任务的目标路径;生成模块用于根据速度等级配置轨迹点计算模型;以及根据目标路径和轨迹点计算模型,获得目标路径上所有轨迹点的行驶速度;驱动控制模块用于根据目标路径和所有轨迹点的行驶速度,控制机器人执行移动任务。该控制系统可以基于移动任务的不同需求对不同模块的计算模型进行配置,配置得到的各计算模型能够符合该移动任务的控制需求,每个模块面对不同的需求可以自适应变更计算模型,且变更不影响整体的系统架构,基于各计算模型可以获得更适用的目标路径和行驶速度,更匹配对应移动任务的控制场景需求,进而提高了机器人在不同移动控制场景下的适用性。
技术特征:
1.一种机器人的移动控制系统,其特征在于,所述系统包括:
2.根据权利要求1所述的机器人的移动控制系统,其特征在于,所述系统还包括:
3.根据权利要求2所述的机器人的移动控制系统,其特征在于,所述感知器件包括激光雷达、相机、gps定位器、北斗定位器、rfid读卡器和二维码读卡器中的一种。
4.根据权利要求1所述的机器人的移动控制系统,其特征在于,所述系统还包括:
5.根据权利要求1所述的机器人的移动控制系统,其特征在于,所述系统还包括:
6.根据权利要求5所述的机器人的移动控制系统,其特征在于,所述反馈矫正模块还用于根据所述机器人的感知位置和预设传感器的反馈位置的位置偏差,获得所述行驶偏差。
7.根据权利要求6所述的机器人的移动控制系统,其特征在于,所述预设传感器包括里程计、惯性导航传感器和磁导航传感器中的一种。
8.一种机器人的移动控制方法,其特征在于,所述方法包括:
9.根据权利要求8所述的机器人的移动控制方法,其特征在于,所述根据所述目标路径和所述所有轨迹点的行驶速度,控制所述机器人执行所述移动任务之前,所述方法还包括:
10.根据权利要求8所述的机器人的移动控制方法,其特征在于,所述根据所述目标路径和所述所有轨迹点的行驶速度,控制所述机器人执行所述移动任务之前,所述方法还包括:
11.根据权利要求8所述的机器人的移动控制方法,其特征在于,所述根据所述目标路径和所述所有轨迹点的行驶速度,控制所述机器人执行所述移动任务之前,所述方法还包括:
12.根据权利要求11所述的机器人的移动控制方法,其特征在于,所述根据所述目标路径中已行驶轨迹点的行驶偏差和所述反馈计算模型,更新所述目标路径中未行驶轨迹点的行驶速度之前,所述方法还包括:
13.一种机器人,其特征在于,所述机器人包括权利要求1-7任一所述的移动控制系统。
技术总结
本发明公开了一种机器人的移动控制系统、方法和机器人,涉及机器人移动控制的技术领域。移动控制系统包括获取模块、导航模块、生成模块和驱动控制模块;该控制系统可以基于移动任务的不同需求对不同模块的计算模型进行配置,配置得到的各计算模型能够符合该移动任务的控制需求,每个模块面对不同的需求可以自适应变更计算模型,且变更不影响整体的系统架构,基于各计算模型可以获得更适用的目标路径和行驶速度,更匹配对应移动任务的控制场景需求,进而提高了机器人在不同移动控制场景下的适用性。
技术研发人员:徐荣,苏利杰,陈治国,汪子恂
受保护的技术使用者:中车长江运输设备集团有限公司科技开发分公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!