一种无人机陀螺仪非线性转动信号的尺度参数可调形态滤波方法与流程
[0001]
本发明涉及非线性陀螺仪信号降噪领域,具体涉及一种无人机陀螺仪非线性转动信号的尺度参数可调形态滤波方法,用于转动信号中混合噪声的抑制以及有效信息的保留。
背景技术:
[0002]
对于无人机陀螺仪非线性转动信号中高强度混合噪声的抑制以及有效信号提取,在微机电陀螺仪系统信号分析中具有广泛的应用。常见的非线性信号处理方法有快速傅立叶变换、小波变换和经验模态分解等,但受各自的局限影响,单一方法使用往往效果不佳。形态分析是一种非线性时频分析方法,对非线性转动信号形态滤波时,结构元素作为“探针”对信号的集合特征进行局部匹配或修正。但对传统形态滤波而言,滤波结果存在的统计偏倚现象,以及结构元素关键的尺度选取问题,直接影响到信号降噪的效果。此外有效信号中往往混杂着多种高强度噪声,一般一种结构元素对一种噪声有较好的滤波效果,待处理的信号形状不同以及噪声类型不同,不同的结构元素才能达到噪声压制的目的。对非线性转动信号,若被污染的噪声强度太大,直接对整体进行形态滤波,往往对噪声抑制不彻底。这些诸多因素对形态滤波降噪和有效信号保留带来不利的影响。
技术实现要素:
[0003]
发明目的:为了克服传统滤波方法的不足,提高转动信号降噪的有效性和保留有效信号的准确性,本发明提供一种无人机陀螺仪非线性转动信号的尺度参数可调形态滤波方法。
[0004]
技术方案:一种无人机陀螺仪非线性转动信号的尺度参数可调形态滤波方法,包括以下步骤:
[0005]
(1)提取无人机陀螺仪输出的非线性转动信号序列,构建非线性转动信号的时域图;
[0006]
(2)构造高斯白噪声序列η
(n)
以及随机脉冲噪声序列ψ
(n)
,构建高斯白噪声序列η
(n)
以及随机脉冲噪声序列ψ
(n)
的时域图;将高斯白噪声序列η
(n)
、随机脉冲噪声序列ψ
(n)
和非线性转动信号序列叠加,得到新信号序列;对新信号序列采样得到待处理信号序列f
(n)
;
[0007]
(3)选取三角形结构元素b1和半圆形结构元素b2;级联开闭形态算子,将广义形态开-闭滤波器g
oc
(f
(n)
)和形态闭-开滤波器g
co
(f
(n)
)分别定义为:
[0008][0009][0010]
定义广义形态滤波器的基本滤波单元为:
[0011][0012]
用b1和b2构建自适应多尺度广义形态滤波器;
[0013]
(4)使用变分模态分解算法对待处理信号序列f
(n)
进行k层非递归分解,得到各层模态分量u1,u2,...,u
k
;
[0014]
(5)计算各层模态分量的参数指标值,参数指标包括均方根误差和功率谱熵;
[0015]
(6)对于分解后的各层模态分量,将第一层模态分量u1保留,根据第一层模态分量及噪声,选取结构元素值s
(1)
和t
(1)
作为第一层模态分量对应的长度尺寸;并将第一层模态分量的参数指标值作为初始基准点,根据长度尺寸调整方法计算出其余各层模态分量结构元素所分别对应的长度尺寸,半圆形结构元素的长度尺寸为s
(i)
,三角形结构元素的长度尺寸为t
(i)
;
[0016]
(7)对于其余层模态分量u
i
,利用自适应多尺度广义形态滤波器,b1和b2分别以尺度s
(i)
、t
(i)
滤波,得到各层的输出序列
[0017]
(8)把保留的第一层模态分量u1和输出序列进行重构,得到新的陀螺仪信号。
[0018]
进一步地,步骤(4)对待处理信号序列f
(n)
分解的具体方法为:
[0019]
(21)初始化λ
l
、n,令其初始值均为0,设置分解模态层数k;其中,表示每层模态分量分解时的稀疏性从而导致产生的中心频率,λ
l
表示优化拉格朗日乘子;n表示迭代次数;
[0020]
(22)n=n+1,开始进行循环;将u
i
、w
i
、λ以基准因子τ更新;i从1开始一直循环到k,k为模态层数;
[0021]
对u
k
更新:
[0022][0023]
对w
k
更新:
[0024][0025]
对λ更新:
[0026][0027]
给定判定精度e>0,若满足判定表达式:
[0028][0029]
则确定迭代结束;
[0030]
(23)迭代结束后得到各层模态分量u1,u2,...,u
k
。
[0031]
进一步地,步骤(5)各层模态分量的参数指标值的计算方法为:
[0032]
(31)设均方根误差为rmse,计算公式为:
[0033]
[0034]
(32)设信号功率谱熵为pse,获得pse的步骤是:
[0035]
1)功率谱计算公式:
[0036][0037]
其中n是f(n)的长度,x(ω)是对f(n)进行fft得到的处理结果。
[0038]
2)根据能量守恒定律,利用频率分量的归一化可以得到频谱密度函数:
[0039]
∑x2(t)δt=∑|x(ω)|2δω
[0040]
3)功率谱熵定义为
[0041][0042]
其中表示第一个子带谱值在整个功率谱上的比重。
[0043]
进一步地,步骤(6)中,其余层模态分量结构元素所分别对应的长度尺寸计算方法为:
[0044]
将第一层模态分量的参数指标值作为初始基准点,依据每层模态分量计算出的参数指标值计算其余层模态分量结构元素所分别对应的长度尺寸,半圆形结构元素长度尺寸s
(i)
为:
[0045][0046]
三角形结构元素长度尺寸t
(i)
为:
[0047][0048]
本发明提供一种无人机陀螺仪非线性转动信号的尺度参数可调形态滤波方法,相比较现有技术,具有以下优点:
[0049]
1、本发明通过采用自适应多尺度广义形态滤波结合vmd进行非迭代分解,把高强度混合噪声分解至不同分量,并对不同噪声有针对性抑制,去噪更加有效彻底。
[0050]
2、本发明结合参数指标提出的可靠尺度调整标准,实现结构元素的多尺度自适应调整,可获得滤波效果颇佳的尺寸参数。
[0051]
3、本发明能避免统计偏倚现象的出现,很好地保留了有效信息。
附图说明
[0052]
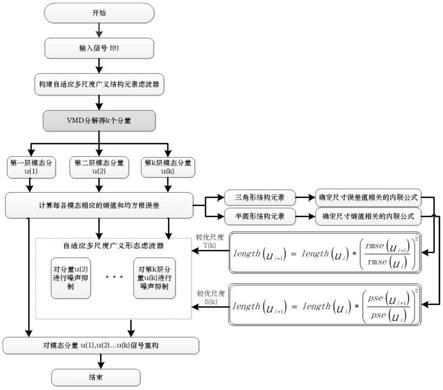
图1为本发明非线性转动信号的尺度参数可调的形态滤波方法的流程图;
[0053]
图2(a)为实施例中构建的有效信号及待处理信号;
[0054]
图2(b)为实施例中处理信号的分解结果。
[0055]
图3为实验中处理信号各模态分量进行形态滤波后的结果。
[0056]
图4为实验中各分量进行重构后得到的新的陀螺仪信号。
具体实施方式
[0057]
下面结合附图和具体实施例,对本发明作进一步说明。
[0058]
本实施例中提取的陀螺仪输出的非线性转动信号为f(t)=e
3t
*sin(3t)+η(t)+φ(t),下面采用非线性转动信号的尺度参数可调的形态滤波方法对该转动信号进行滤波,并用实验证明其滤波效果。如图1所示,该方法包括以下步骤:
[0059]
(1)提取陀螺仪输出的非线性转动信号f(t)=e
3t
*sin(3t)+η(t)+φ(t),并构建非线性转动信号的时域图;
[0060]
(2)构造高斯白噪声序列η
(n)
以及随机脉冲噪声序列ψ
(n)
,并构建高斯白噪声序列η
(n)
以及随机脉冲噪声序列ψ
(n)
的时域图;其中,高斯白噪声η
(n)
的均值为0,方差为1,强度α=2;随机脉冲噪声ψ
(n)
的均值为0,强度β=1,;将高斯白噪声序列η
(n)
、随机脉冲噪声序列ψ
(n)
和非线性转动信号f(t)叠加得到新信号序列;再对新信号序列进行采样,采样点数是1000个,采样频率为1024hz,得到有效信号及待处理信号序列f
(n)
,如图2(a)所示。
[0061]
(3)选取三角形结构元素(tse)b1用于滤除信号中随机脉冲噪声和半圆形结构元素(sse)b2用于滤除高斯白噪声,级联开闭形态算子,则将广义形态开-闭和形态闭-开虑波器分别定义为:
[0062][0063][0064]
定义广义形态滤波器的基本滤波单元为:
[0065][0066]
用上述结构元素b1、b2构建自适应多尺度广义形态滤波器;
[0067]
(4)初始化设置k值,在经过综合考虑分析后,设置k=6为最佳,使用变分模态分解算法对待处理信号序列f
(n)
进行分解,得6层模态分量;vmd具体参数初始化设置为平衡参数字alpha为2000,噪音差tau为0,收敛公差标准tol为1e-7;如图2(b)所示为信号分解图。多层分解方法具体包括如下步骤:
[0068]
(21)初始化λ
l
、n,令其初始值均为0,将分解模态数k设置为6;其中,表示每层模态分量分解时的稀疏性从而导致产生的中心频率,λ
l
表示优化拉格朗日乘子;n表示迭代次数;
[0069]
(22)n=n+1,开始进行循环;将u
i
、w
i
、λ以基准因子τ进行更新;k从1开始一直循环到6;
[0070]
对u
k
更新:
[0071][0072]
对w
k
更新:
[0073][0074]
对λ更新:
[0075][0076]
(23)给定判定精度e>0,若满足判定表达式:
[0077][0078]
则确定迭代结束,得到各层模态分量u1,u2,...,u
k
;
[0079]
(5)引入均方根误差(rmse)和功率谱熵(pse)两项参数指标,计算得出每层模态分量参数指标值,如表一所示;
[0080]
参数指标值计算包括如下步骤:
[0081]
(51)均方根误差的计算公式为:
[0082][0083]
(52)设信号功率谱熵为pse,pse是香农熵在频域上的扩展,与信号的频率分量分布有关。获得pse的步骤是:
[0084]
1)功率谱计算公式:
[0085][0086]
其中n是f
(n)
的长度,x(ω)是用fft得到的处理结果。
[0087]
2)根据能量守恒定律,利用频率分量的归一化可以得到频谱密度函数:
[0088]
∑x2(t)δt=∑|x(ω)|2δω
[0089]
3)功率谱熵定义为
[0090][0091]
其中表示第一个子带谱值在整个功率谱上的比重。
[0092]
表一
[0093][0094][0095]
rmse值作为描述随机脉冲噪声状态的指标值,对应tse的降噪效果;pse值作为描
述高斯白噪声状态的指标值,对应sse的降噪效果,即:
[0096]
pse
→
高斯白噪声η
(n)
→
sse,
[0097]
rmse
→
脉冲噪声ψ
(n)
→
tse;
[0098]
(6)对第一层低频有效信号模态u1保留;根据第一层模态分量及噪声,选取结构元素值s
(1)
和t
(1)
,确保用该组结构元素值进行多尺度形态滤波后能够最大程度保留原始分量,将s
(1)
和t
(1)
作为第一层分量的滤波尺寸,依据尺度调整标准计算出其余分量结构元素分别对应的长度尺寸,sse长度尺寸为s
(i)
,tse长度尺寸为t
(i)
;
[0099]
尺度调整标准具体为:
[0100]
把第一层分量的参数指标计算值作为基准点,依据每层分量计算出的参数指标值,计算其余各层模态分量的结构元素分别对应的长度尺寸,sse长度尺寸为:
[0101][0102]
tse长度尺寸为:
[0103][0104]
如表一所示,对各层模态分量,计算得出两个结构元素各自所选用的长度尺寸。
[0105]
(7)对于其他分量u
k
,b1、b2分别以尺度t
(i)
、s
(i)
对各模态进行滤波,得各层的输出序列如图3所示为对原分量形态滤波后得到的结果。
[0106]
(8)把保留的第一层低频分量和滤波降噪提取后的分量进行重构,得到新的陀螺仪信号f
(n)
,如图4所示。
[0107]
经过试验证明,本实施例提出的一种非线性信号的尺度参数可调的形态滤波方法能自适应给出效果颇佳的长度参数,对高强度混合噪声能有针对性地高效抑制,克服传统虑波统计偏倚问题,降低了对高强度污染信号处理的难易度,并很好地保留了有效信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1