一种晶圆对准装置及对准方法与流程
1.本发明涉及半导体加工技术领域,特别是涉及一种晶圆对准装置及对准方法。
背景技术:
2.随着科学技术的发展,图像处理硬件技术有了飞速的进步,图像识别技术的应用也越来越广泛。通过采集到的数据信息,并对其进行分析从而获得关键信息,从而满足各行业的发展需求。在半导体行业中,图像识别及处理技术通常与显微成像结合,用来检测晶圆表面微观图案品质,或用来测量晶圆的位置。
3.键合是将多个芯片堆叠在一起,芯片间采用垂直通孔实现电连接的一种工艺,已被广泛视为一种超越“摩尔定律”的途径,国际半导体技术路线图(itrs)已将3d互连方式作为解决互连引线瓶颈问题的一种优选方案。为保证键合晶圆的电气连接性能,需要将两片晶圆上的极小的电路对正。在键合设备中,显微视觉系统用来拍摄待键合晶圆标记点,通过机器视觉学习和亚像素算法,计算出被拍摄标记点的中心位置,从而测量出两片待键合晶圆的空间位置偏差。通常待键合的两片晶圆在光刻时都会在各自划片道上刻出公母标记(mark),键合时,以公母标记作为对准的标记,标记对准,则视为电路对准。
4.现有键合设备中,使用带有两个c型臂的左右视觉系统测量上下晶圆上标记的差值,再通过运动台将差值补偿。每一个c型臂上装有上、下两套显微成像系统,分别拍摄下、上晶圆上的标记。如图9所示,以其中一套为例:视觉系统主要组件包括x向移动组件302、y向移动组件303、气浮底座301、c型臂304,其中x、y向组件带动气浮底座在机台基座300上平移,气浮底座承载着c型臂,c型臂可z向升降完成对焦,c型臂的两个悬臂上安装有两套显微成像系统。
5.c型臂可由下方的底座带动在平面内移动,并通过底座对移动位置进行反馈。气浮底座的位置可由x、y向移动组件中的光栅尺测量,理论上,c型臂端部物镜的位置也是已知的,当气浮底座保持静止时,理论上c型臂静止,视觉系统在取像时也保持静止,这样所测量到的上下晶圆标记位置差就是上下晶圆的位置差,但由于结构比较复杂,调试难度相对较大。
技术实现要素:
6.本发明的目的是提供一种晶圆对准装置及对准方法。
7.为了解决上述技术问题,本技术提供了如下技术方案:
8.一种晶圆对准装置,包括基座,所述基座上方设有下运动台和上运动台,所述基座上装有校准标记,所述上运动台上设有上承载台,所述下运动台上设有下承载台;所述上承载台的上方及下承载台的下方分别设有两套视觉系统。
9.其中,所述上承载台的中央设有微动台,所述微动台下方设有上吸盘;所述下承载台上方设有下吸盘。
10.其中,所述上运动台的顶部设有两组气浮导轨,上承载台两侧装有气浮轴承,上承
载台可相对于上运动台在y方向进行大行程移动;所述下运动台的顶部设有两组气浮导轨,下承载台两侧装有气浮轴承,下承载台可相对于下运动台在y方向进行大行程移动。
11.其中,所述校准标记为刻有标记图案的透明玻璃片。
12.其中,所述视觉系统包括对焦组件、显微系统和x向组件;
13.所述x向组件包括第一基板,第一基板上固定有第一压电陶瓷电机和第一直线导轨,所述第一压电陶瓷电机的一侧设有第一滑动板,第一滑动板可沿第一直线导轨滑动,所述第一滑动板上与第一压电陶瓷电机相邻的一侧外表面粘贴有第一陶瓷片,所述第一滑动板上设有光栅尺,第一基板上还固定有第一读数头。
14.所述对焦组件固定于所述第一滑动板的上方,所述对焦组件包括第二基板,所述第二基板与所述第一滑动板固定连接,所述第二基板的一侧固定有第二压电陶瓷电机和第二直线导轨,所述第二压电陶瓷电机的一侧设有第二滑动板,所述第二滑动板可沿第二直线导轨滑动,所述第二滑动板上与第二压电陶瓷电机相邻的一侧外表面粘贴有第二陶瓷片,所述第二滑动板上设有光栅尺,第二基板上还固定有第二读数头。
15.所述显微系统固定在所述第二滑动板的外侧,所述显微系统包括光路组件,所述光路组件与所述第二滑动板的外侧固定连接,所述光路组件的上方固定有相机,所述光路组件的侧面设有光源,所述光路组件的下方固定有物镜。
16.其中,所述对焦组件、显微系统和x向组件之间均通过螺钉固定连接,所述视觉系统通过螺钉固定在所述上承载台或下承载台上。
17.其中,所述基座上设有3个顶杆,所述下运动台安装于3个顶杆上;所述基座为大理石材质,其上表面为气浮面,上运动台的底部为气浮块,可在基座表面浮起和落下,上运动台浮起后,可由执行部件推动,在平面内平移或旋转;
18.所述上承载台相对于上运动台的移动通过直线电机驱动,由光栅尺反馈;所述下承载台相对于下运动台的移动通过直线电机驱动,由光栅尺反馈。
19.本发明晶圆对准装置的对准方法,包括以下步骤:
20.(1)由外部机械手将上、下晶圆分别装载到上、下承载台上,上、下承载台分别吸附上下晶圆;
21.(2)上、下承载台同时移动至校准标记的一侧,每个视觉系统自动对准校准标记拍照,计算每一个镜头的位置;
22.(3)下承载台保持静止,上承载台y向大行程移动,并且上承载台的两个视觉系统各自调整x向位置,将两个视觉系统的两个物镜移动到下晶圆的母标记的理论坐标所在位置;执行对焦,获取下晶圆的标记图像,此时记录上承载台及其两个视觉系统的光栅尺位置,并解算下晶圆的标记在显微系统视场中的位置,通过计算可以得出下晶圆的标记相对于校准标记的x、y坐标差;
23.(4)上、下承载台交换位置,上承载台回到拍摄校准标记的位置,并调整至步骤(2)时的位置,或记下与步骤(2)位置之间的偏差;下承载台y向大行程移动,并且下承载台的两个视觉系统各自调整x向位置,将两个视觉系统的两个物镜移动到上晶圆的标记的理论坐标所在位置,执行对焦步骤,获取上晶圆的标记图像;此时记录下承载台及其两个视觉系统的光栅尺位置,并解算上晶圆的标记在显微系统视场中的位置,通过计算可以得出上晶圆的标记相对于校准标记的x、y坐标差;
24.(5)下承载台回到步骤(2)所在的位置,通过步骤(3)、(4)中分别测出上下晶圆的标记相对于校准标记的位置差,可以算出上下晶圆的位置差,计算出偏差后,通过移动上运动台,进行晶圆位置补偿与对正;
25.(6)上、下晶圆相对位置按上一步测量值调整后,下运动台上升,将下承载台上的下晶圆托起,靠近上晶圆;在间隙达到预设值后,下承载台的两个视觉系统重新对焦校准标记,计算下承载台在上升过程中可能发生的位置偏移,补偿到上承载台的微动台运动中;补偿完成后,上晶圆被释放,上下晶圆贴合,完成对准键合。
26.与现有技术相比,本发明的晶圆对准装置及对准方法至少具有以下有益效果:
27.本发明的晶圆对准装置取消了c型臂视觉系统,使用一种独立的视觉系统实现测量功能,该视觉系统无悬臂结构且结构紧凑。使用压电陶瓷电机作为驱动可以实现精密移动和断电保持。
28.在最终上下晶圆贴合之前,上下晶圆的相对位置变化可以实时通过视觉系统拍摄校准标记测量,用于最终上下晶圆相对位置补偿。
29.下面结合附图对本发明的晶圆对准装置及对准方法作进一步说明。
附图说明
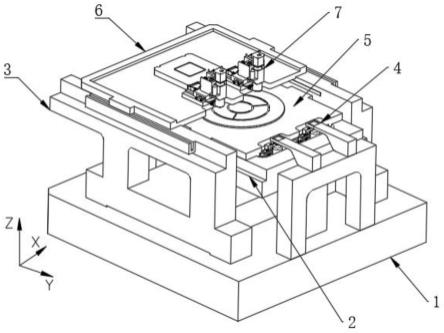
30.图1为本发明晶圆对准装置的结构示意图;
31.图2为本发明晶圆对准装置的主视图(其中,校准标记在图中未示出);
32.图3为本发明晶圆对准装置的另一结构示意图;
33.图4为上、下晶圆的标记与校准标记之间的距离示意图;
34.图5为视觉系统的结构示意图;
35.图6为x向组件的结构示意图;
36.图7为对焦组件的结构示意图;
37.图8为显微系统的结构示意图;
38.图9为现有技术中的视觉系统的结构示意图。
39.其中,1-基座,2-下运动台,3-上运动台,4-校准标记,5-下承载台,6-上承载台,7-视觉系统;
40.11-上吸盘,12-第一气浮轴承,13-第一直线电机,14-第一气浮导轨,15-第一光栅尺,16-下吸盘;17-第二气浮轴承,18-第二直线电机,19-第二气浮导轨,20-第二光栅尺;
41.21-对焦组件,22-显微系统,23-x向组件;24-第一基板,25-第一直线导轨,26-第一滑动板,27-第一读数头,28-第一压电陶瓷电机,29-第一陶瓷片;30-第二基板,31-第二直线导轨,32-第二滑动板,33-第二读数头,34-第二压电陶瓷电机,35-第二陶瓷片;36-相机,37-光源,38-光路组件,39-物镜;
42.100-上晶圆,101-公标记,200-下晶圆,201-母标记;
43.300-基座,301-气浮底座,302-x向移动组件,303-y向移动组件,304-c型臂。
具体实施方式
44.如图1-3所示,一种晶圆对准装置,包括基座1,所述基座1上方设有下运动台2和上运动台3,所述基座1上装有两处校准标记4,所述上运动台3上设有上承载台6,所述下运动
台2上设有下承载台5;所述上承载台6的上方及下承载台5的下方分别设有两套视觉系统7。
45.每一套视觉系统7都可在x向、z向独立移动。其中,上承载台6上方的两套视觉系统可称为上视觉系统,下承载台5下方的两套视觉系统可称为下视觉系统。
46.基座为大理石材质,其上表面为气浮面,上运动台3的底部为气浮块,可在基座表面浮起和落下,上运动台3浮起后,可由执行部件推动,在平面内平移或旋转。基座1上设有3个顶杆,所述下运动台2安装于3个顶杆上;下运动台2可由顶杆推动,完成垂向升降。
47.上承载台6的中央设有微动台,所述微动台下方设有上吸盘11;通过调整微动台的姿态,上吸盘11可以完成平移及偏转动作。所述下承载台5上方设有下吸盘16。
48.如图2-3所示,上运动台3的顶部设有两组第一气浮导轨14,上承载台6两侧装有第一气浮轴承12,上承载台6可相对于上运动台3在y方向进行大行程移动;所述下运动台2的顶部设有两组第二气浮导轨19,下承载台5两侧装有第二气浮轴承17,下承载台5可相对于下运动台2在y方向进行大行程移动。
49.上承载台6相对于上运动台3的移动通过第一直线电机13驱动,由第一光栅尺15反馈;所述下承载台5相对于下运动台2的移动通过第二直线电机18驱动,由第二光栅尺20反馈。
50.校准标记4为刻有标记图案的透明玻璃片(从上或从下都可以看到该图案),其相对于基座始终是静止的,并具有良好的刚性。标记图案可以为标定点、标定图案、标准图案、校准图案等,只要图案可以被视觉系统完整拍摄到,视觉系统可以计算出图案的中心位置,就可以使用。在本实施例中,校准标记采用“呈矩阵形式排列的4个小正方形”以及“位于4个小正方形中心的十字星”的组合图案。
51.如图5-8所示,视觉系统7包括对焦组件21、显微系统22和x向组件23;
52.x向组件23包括第一基板24,第一基板24上固定有第一压电陶瓷电机28和第一直线导轨25,所述第一压电陶瓷电机28的一侧设有第一滑动板26,第一滑动板26可沿第一直线导轨25滑动,所述第一滑动板26上与第一压电陶瓷电机28相邻的一侧外表面粘贴有第一陶瓷片29,所述第一滑动板26上设有光栅尺,第一基板24上还固定有第一读数头27。通过光栅尺和第一读数头27之间的相对运动测量位置。第一直线导轨25优先选择交叉滚柱导轨,也可以选择宽幅滚珠导轨。运动时,第一压电陶瓷电机的触点拨动第一陶瓷片,带动第一滑动板移动。
53.对焦组件21固定于所述第一滑动板26的上方,所述对焦组件21包括第二基板30,所述第二基板30与所述第一滑动板26固定连接,所述第二基板30的一侧固定有第二压电陶瓷电机34和第二直线导轨31,所述第二压电陶瓷电机34的一侧设有第二滑动板32,所述第二滑动板32可沿第二直线导轨31滑动,所述第二滑动板32上与第二压电陶瓷电机34相邻的一侧外表面粘贴有第二陶瓷片35,所述第二滑动板32上设有光栅尺,第二基板30上还固定有第二读数头33。通过光栅尺和第二读数头33之间的相对运动测量位置。第二直线导轨31优先选择交叉滚柱导轨,也可以选择宽幅滚珠导轨。运动时,第二压电陶瓷电机的触点拨动第二陶瓷片,带动第二滑动板移动。
54.显微系统22固定在所述第二滑动板32的外侧,所述显微系统22包括光路组件38,所述光路组件38与所述第二滑动板32的外侧固定连接,所述光路组件38的上方固定有相机36,所述光路组件38的侧面设有光源37,所述光路组件38的下方固定有物镜39。
55.对焦组件21、显微系统22和x向组件23之间均通过螺钉固定连接,所述视觉系统7通过螺钉固定在所述上承载台6或下承载台5上。
56.使用时,通过各轴调整位置,将显微系统对准被检测物,对焦组件升降调整至物镜合焦高度,断开电机使能,显微系统静止在当前位置,拍摄图像。当需要检测多个被测物时,各轴的移动量通过光栅尺被测出,可用于计算各被测物之间的距离,或用作其它移动轴的补偿计算。
57.该晶圆对准装置的对准方法,包括以下步骤:
58.(1)由外部机械手将上、下晶圆分别装载到上、下承载台上,上、下承载台分别吸附上下晶圆;
59.(2)上、下承载台同时移动至校准标记的一侧,每个视觉系统自动对准校准标记拍照,计算每一个镜头的位置;此步骤相当于以校准标记为基准,将各镜头的x、y坐标清零。
60.(3)下承载台保持静止;在实际中可能存在实时位置误差,这可以通过下视觉系统实时拍摄校准标记进行测量;
61.关于承载台保持静止可以有两种方法:
①
承载台保持气浮状态,同时电机保持使能状态,实时控制承载台保持当前位置;
②
承载台断开气浮,落在或真空吸附在气浮导轨上,电机断开使能(即断掉电机控制,电机不出力);
62.此时,上承载台y向大行程移动,并且上承载台的两个视觉系统各自调整x向位置,将两个视觉系统的两个物镜移动到下晶圆的母标记的理论坐标所在位置;执行对焦,获取下晶圆的母标记图像,此时记录上承载台及其两个视觉系统的光栅尺位置,并解算下晶圆的母标记在显微系统视场中的位置,通过计算可以得出下晶圆的母标记相对于校准标记的x、y坐标差;其中,公标记和母标记在上晶圆或者下晶圆均可,比如公标记在上晶圆、母标记在下晶圆,或者公标记在下晶圆、母标记在上晶圆,仅需保证两个标记是相反的即可。本实施例仅以前一种情况为例。
63.(4)上、下承载台交换位置,上承载台回到拍摄校准标记的位置,并调整至步骤(2)时的位置,或记下与步骤(2)位置之间的偏差;下承载台y向大行程移动,并且下承载台的两个视觉系统各自调整x向位置,将两个视觉系统的两个物镜移动到上晶圆的公标记的理论坐标所在位置,执行对焦步骤,获取上晶圆的公标记图像;此时记录下承载台及其两个视觉系统的光栅尺位置,并解算上晶圆的公标记在显微系统视场中的位置,通过计算可以得出上晶圆的公标记相对于校准标记的x、y坐标差;
64.(5)下承载台回到步骤(2)所在的位置,计算出偏差后进行晶圆位置补偿与对正;其中,步骤(3)和步骤(4)中各向光栅尺读出的移动距离如图4所示,晶圆上两组标记分别定义为标记1和标记2。对于第1组,δx1=xm1-xf1,δy1=ym1-yf1,δx1、δy1即为第1组晶圆mark空间坐标差值,同理,δx2、δy2即为第2组晶圆mark空间坐标差值。
65.其中,定义上晶圆100和下晶圆200的标记分别为公标记101(十字星图案)和母标记201(图案为呈矩阵形式排列的4个小正方形),xm1表示1号公标记的x坐标相对于校准标记的差值,xf1表示1号母标记的x坐标相对于校准标记的差值,这两个差值相减就是1号公、母标记的x向间距,y同理。
66.如果承载台回到校准位置时,通过视觉系统测量,与第一步中的位置存在偏差,需要将偏差值(设置机台坐标系,约定x、y向的正方向,所有与正方向同向的取正值,与正方向
反向的取负值)补偿到计算中,仍然可以计算出比较准确的上、下晶圆标记空间坐标差值。当知道两片晶圆对应位置标记坐标的偏差后,就可以将这个偏差值转换成其中一片的移动量,完成两片晶圆对准。本装置的上运动台可以完成平面内的粗动,并且上承载台的微动台可以完成平面内的精动。
67.(6)上、下晶圆相对位置按上一步测量值调整后,下运动台上升,将下承载台上的下晶圆托起,靠近上晶圆;在间隙达到预设值后,下承载台的两个视觉系统重新对焦校准标记,计算下承载台在上升过程中可能发生的位置偏移,补偿到上承载台的微动台运动中;补偿完成后,上晶圆被释放,上下晶圆贴合,完成对准键合。
68.首先,在本装置中,视觉系统结构紧凑,不存在较长的悬臂,由于自身摆动所产生的测量误差非常小。其次,虽然存在较多的运动轴,但每个轴的位置都可以被准确的测量出来,最终补偿到位置误差计算中。第三,使用压电陶瓷电机驱动视觉系统,断掉使能后,压电陶瓷电机的自锁特性可以使视觉系统保持绝对静止。第四,在上、下承载台(也可认为上、下晶圆)调整相对位置时,以及在下承载台上升至准备键合的位置后,承载台在运动过程中产生的误差可以实时通过视觉系统和校准标记测量,并补偿到微动台精动中。
69.总体而言,本晶圆对准装置和对准方法可以将全部位置数据和误差变成已知,用于最终的计算补偿,可以降低检测误差,提高对准精度。
70.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1