雷达天线的装置、系统和方法与流程
1.本文所述的各方面总体上涉及雷达天线。
背景技术:
2.多输入多输出(multiple input multiple output,mimo)雷达是允许减少物理阵列孔径并允许多个天线元件的技术。例如,mimo雷达利用来自具有多个元件的发射(transmit,tx)阵列的正交信号的传输,并经由具有多个元件的接收(receive,rx)阵列处理所接收的信号。
附图说明
3.为说明简单和清楚起见,附图中示出的元件不一定是按比例绘制的。例如,为呈现清楚起见,元件中的一些元件的尺寸可以相对于其他元件被放大。此外,附图标记可在附图之间重复以指示对应或类似的元件。下文列出附图。
4.图1是根据一些说明性方面的实现雷达的交通工具的示意性框图图示。
5.图2是根据一些说明性方面的实现雷达的机器人的示意性框图图示。
6.图3是根据一些说明性方面的雷达装置的示意性框图图示。
7.图4是根据一些说明性方面的频率调制连续波(frequency-modulated continuous wave,fmcw)雷达装置的示意性框图图示。
8.图5是根据一些说明性方面的可被实现为从数字接收雷达数据值中提取距离和速率(多普勒,doppler)估计的提取方案的示意图。
9.图6是根据一些说明性方面的可被实现为基于由接收天线阵列接收到的传入无线电信号来确定到达角(angle of arrival,aoa)信息的角度确定方案的示意图。
10.图7是根据一些说明性方面的可以基于发射(tx)和接收(rx)天线的组合来实现的多输入多输出(mimo)雷达天线方案的示意图。
11.图8是根据一些说明性方面的雷达前端和雷达处理器的示意性框图图示。
12.图9是根据一些说明性方面的天线阵列的布置的示意性图示,第一图描绘经由天线阵列接收的第一rx雷达信号的第一相位,第二图描绘经由天线阵列接收的第二rx雷达信号的第二相位,用于演示可以解决的技术问题。
13.图10是根据一些说明性方面的包括雷达天线的装置的示意性图示。
14.图11a是根据一些说明性方面的天线阵列的布置的示意性图示。
15.图11b是根据一些说明性方面的描绘经由图11a的天线阵列接收的第一rx雷达信号的第一相位的第一图和描绘经由图11a的天线阵列接收的第二rx雷达信号的第二相位的第二图的示意性图示。
16.图12是根据一些说明性方面的雷达检测方案的模拟结果的示意性图示。
17.图13是根据一些说明性方面的确定用于经由雷达天线传输雷达信号的传输顺序的方法的示意流程图示。
18.图14是根据一些说明性方面的基于虚拟雷达天线信息检测一个或多个角度的方法的示意流程图示。
19.图15是根据一些说明性方面的确定一个或多个多普勒折叠因子的方法的示意性流程图图示。
20.图16是根据一些说明性方面的描绘与对应于角度的假设的相应多个假设分数相对应的多个能谱的图的示意性图示。
21.图17是根据一些说明性方面的描绘与对应于角度的假设的相应多个假设分数相对应的多个能谱的图的示意性图示。
22.图18是根据一些说明性方面的基于信噪比(signal to noise ratio,snr)损失的相位差的直方图的示意性图示。
23.图19是根据一些说明性方面的处理雷达信息的方法的示意性流程图图示。
24.图20是根据一些说明性方面的制造的产品(product of manufacture)的示意性图示。
具体实施方式
25.在下列具体实施方式中,阐述了众多特定细节以便提供对某些方面的透彻理解。然而,本领域的普通技术人员将理解,可在没有这些特定细节的情况下实践某些方面。在其他实例中,未详细描述公知的方法、过程、部件、单元和/或电路,以免使讨论模糊。
26.本文采用诸如例如“处理”、“计算”、“运算”、“确定”、“建立”、“分析”、“检查”等术语的讨论可指计算机、计算平台、计算系统或其他电子计算设备的(一个或多个)操作和/或(一个或多个)过程,这些操作和/或过程操纵被表示为计算机的寄存器和/或存储器内的物理(例如,电子)量的数据和/或将该数据变换成类似地被表示为计算机的寄存器和/或存储器或可存储执行操作和/或处理的指令的其他信息存储介质内的物理量的其他数据。
27.本文使用的术语“复数个(plurality)”和“多个(a plurality)”包括例如“多个”或“两个或更多个”。例如,“多个项目”包括两个或更多个项目。
28.在本技术中使用词“示例性”和“说明性”来意指“充当示例、实例、演示、或说明”。在本技术中被描述为“示例性”或“说明性”的任何方面或设计不一定被解释为相对于其他方面或设计为优选的或有优势的。
29.对“一个方面”、“方面”、“说明性方面”、“各方面”等的引用指示:如此描述的(一个或多个)方面和/或多方面可以包括特定特征、结构或特性,但并非每一个方面必定包括该特定的特征、结构或特性。进一步地,短语“在一个方面中”的重复使用并不一定指同一方面,尽管它可以指同一方面。
30.如此处所使用的,除非另外指定,否则使用序数词“第一”、“第二”、“第三”等来描述共同的对象仅指示类似对象的不同实例被提及,而不旨在暗示如此描述的对象必须按照给定的序列,无论是在时间上、在空间上、在等级上或以任何其他方式。
31.短语“至少一个”和“一个或多个”可被理解为包括大于或等于一的数量,例如,一个、两个、三个、四个、[...]等。关于一组要素的短语
“……
中的至少一个”在本文中可用于意指来自由这些要素组成的组的至少一个要素。例如,关于一组要素的短语
“……
中的至少一个”在本文中可用于意指所列要素中的一个、多个的所列要素中的一个要素、多个个体所
列要素、或多个的数个个体所列要素。
[0032]
如本文中所使用的术语“数据”可被理解为包括采用任何合适的模拟或数字形式的信息,例如,作为文件、文件的部分、文件集合、信号或流、信号或流的部分、信号或流的集合等等来提供的信息。进一步地,术语“数据”还可用于意指对信息的例如以指针的形式的引用。然而,术语“数据”不限于上述示例,并且可采取各种形式和/或可以表示如本领域中理解的任何信息。
[0033]
术语“处理器”或“控制器”可以理解为包括允许处置任何适当类型的数据和/或信息的任何种类的技术实体。可根据由处理器或控制器执行的一个或多个特定功能来处置数据和/或信息。进一步地,处理器或控制器可以被理解为任何种类的电路,例如任何种类的模拟或数字电路。处理器或控制器因此可以是或可包括模拟电路、数字电路、混合信号电路、逻辑电路、处理器、微处理器、中央处理单元(central processing unit,cpu)、图形处理单元(graphics processing unit,gpu)、数字信号处理器(digital signal processor,dsp)、现场可编程门阵列(field programmable gate array,fpga)、集成电路、专用集成电路(application specific integrated circuit,asic)等、或其任何组合。下文将进一步详细描述的相应功能的任何其他种类的实现方式也可被理解为处理器、控制器或逻辑电路。应理解,本文中详述的任何两个(或更多个)处理器、控制器、或逻辑电路可被实现为具有等效功能的单个实体等等,并且相反地,本文中详述的任何单个处理器、控制器或逻辑电路可被实现为具有等效功能的两个(或更多个)分开的实体等等。
[0034]
术语“存储器”被理解为数据或信息可以被存储在其中以供取回的计算机可读介质(例如,非暂态计算机可读介质)。对“存储器”的引用可因此被理解为是指易失性或非易失性存储器,包括随机存取存储器(random access memory,ram)、只读存储器(read-only memory,rom)、闪存、固态存储、磁带、硬盘驱动器、光驱等或其任何组合。在本文中,寄存器、移位寄存器、处理器寄存器、数据缓冲器等等也可由术语存储器包含。术语“软件”可以用来指代任何类型的可执行指令和/或逻辑,包括固件。
[0035]
可以将“交通工具”理解为包括任何类型的被驾驶对象。作为示例,交通工具可以是具有内燃机、电引擎、反应式引擎、电驱动对象、混合驱动对象或其组合的被驾驶对象。交通工具可以是或者可以包括汽车、公共汽车、小型公共汽车、货车、卡车、房车、车辆拖车、摩托车、自行车、三轮车、火车机车、火车车厢、移动机器人、个人运输机、船只、船、潜水器、潜艇、无人机、航空器、火箭等。
[0036]“地面交通工具”可被理解为包括被配置成用于(例如,在街道上、在道路上、在轨迹上、在一条或多条轨道上、越野等)横穿地面的任何类型的交通工具。
[0037]“自主交通工具”可描述能够在不具有驾驶员输入的情况下实现至少一种导航改变的交通工具。导航改变可描述或包括交通工具的转向、制动、加速/减速或与移动相关的任何其他的操作中的一者或多者的改变。即使在交通工具不是完全自主(例如,在有驾驶员或无驾驶员输入的情况下完全可操作)的情况下,也可以将交通工具描述为自主的。自主交通工具可以包括在某些时间段内可以在驾驶员控制下操作并且在其他时间段内无需驾驶员控制而操作的那些交通工具。附加地或替代地,自主交通工具可包括仅控制交通工具导航的一些方面的交通工具,交通工具导航的一些方面诸如转向(例如,在交通工具车道约束之间维持交通工具路线)或在某些情形下(例如,并非在所有情形下)进行一些转向操作,但
可将交通工具导航的其他方面(例如,在某些情形下的制动或刹车)留给驾驶员。附加地或替代地,自主交通工具可以包括:在某些情形下共享对交通工具导航的一个或多个方面(例如,动手操作,诸如响应于驾驶员的输入)的控制的交通工具;和/或在某些情形下控制交通工具导航的一个或多个方面(例如,放手操作,诸如独立于驾驶员的输入)的交通工具。附加地或替代地,自主交通工具可以包括在某些情形下(诸如,在某些环境状况下(例如,空间区域、道路状况等))控制交通工具导航的一个或多个方面的交通工具。在一些方面,自主交通工具可以处置交通工具的制动、速率控制、速度控制、转向和/或其他附加操作中的一些或所有方面。自主交通工具可以包括可以在没有驾驶员的情况下操作的那些交通工具。交通工具的自主性级别可以由交通工具的汽车工程师协会(society of automotive engineers,sae)级别进行描述或确定(例如,由sae例如在sae j3016 2018:“道路机动交通工具的驾驶自动化系统相关术语的分类和定义(taxonomy and definitions for terms related to driving automation systems for on road motor vehicles)”中定义)或由其他相关专业组织进行描述或确定。sae级别可以具有范围从最小级别(例如,0级(说明性地,基本上没有驾驶自动化))到最大级别(例如,5级(说明性地,完全驾驶自动化))的值。
[0038]
短语“交通工具操作数据”可被理解为描述与交通工具的操作有关的任何类型的特征。作为示例,“交通工具操作数据”可描述交通工具的状态,诸如,交通工具的轮胎的类型、交通工具的类型、和/或交通工具的制造的时限。更一般地,“交通工具操作数据”可描述或包括静态特征或静态交通工具操作数据(说明性地,不随时间改变的特征或数据)。作为另一示例,附加地或替代地,“交通工具操作数据”可描述或包括在交通工具的操作期间改变的特征,例如,在交通工具的操作期间的环境状况(诸如,天气状况或道路状况)、燃料水平、液位、交通工具的驱动源的操作参数等。更一般地,“交通工具操作数据”可描述或包括变化的特征或变化的交通工具操作数据(说明性地,时变特征或数据)。
[0039]
一些方面可与各种设备和系统结合使用,各种设备和系统例如,雷达传感器、雷达设备、雷达系统、交通工具、车载系统、自主车载系统、车载通信系统、车载设备、空中平台、水上平台、道路基础设施、运动捕获基础设施、城市监测基础设施、静态基础设施平台、室内平台、移动平台、机器人平台、工业平台、传感器设备、用户装备(user equipment,ue)、移动设备(mobile device,md),无线站(station,sta)、传感器设备、非车载设备、移动或便携式设备等。
[0040]
一些方面可与射频(radio frequency,rf)系统、雷达系统、车载雷达系统、自主系统、机器人系统、检测系统等结合使用。
[0041]
一些说明性方面可与具有10千兆赫(gigahertz,ghz)以上的起始频率的频带(例如,具有10ghz与120ghz之间的起始频率的频带)中的rf频率结合使用。例如,一些说明性方面可与具有30ghz以上(例如,45ghz以上,例如,60ghz以上)的起始频率的rf频率结合使用。例如,一些说明性方面可与汽车雷达频带(例如,76ghz与81ghz之间的频带)结合使用。然而,其他方面可以利用任何其他合适的频带(例如,140ghz以上的频带、300ghz的频带、亚太赫兹(terahertz,thz)频带、thz频带、红外(infra red,ir)频带和/或任何其他频带)来实现。
[0042]
如本文中所使用,术语“电路”可指代下列各项、作为下列各项的部分或包括下列各项:专用集成电路(asic)、集成电路、电子电路、执行一个或多个软件或固件程序的处理
器(共享的、专用的、或组)和/或存储器(共享的、专用的、或组)、组合逻辑电路、和/或提供所描述的功能的其他合适的硬件部件。在一些方面中,电路能以一个或多个软件或固件模块实现,或者与电路相关联的功能可由一个或多个软件或固件模块实现。在一些方面中,电路可包括在硬件中至少部分地可操作的逻辑。
[0043]
术语“逻辑”可以例如指嵌入在计算装置的电路中的计算逻辑和/或存储在计算装置的存储器中的计算逻辑。例如,该逻辑可由计算装置的处理器访问以执行计算逻辑从而执行计算功能和/或操作。在一个示例中,逻辑可以被嵌入在各种类型的存储器和/或固件(例如,各种芯片和/或处理器的硅块)中。逻辑可以被包括在各种电路中,和/或作为各种电路的一部分实现,各种电路例如,无线电电路、接收机电路、控制电路、发射机电路、收发机电路、处理器电路等。在一个示例中,逻辑可被嵌入在易失性存储器和/或非易失性存储器中,该易失性存储器和/或非易失性存储器包括随机存取存储器、只读存储器、可编程存储器、磁存储器、闪存存储器、持久存储器等。逻辑可由一个或多个处理器使用耦合到该一个或多个处理器的存储器(例如,寄存器、缓冲器、栈等)来执行,例如,如执行逻辑所必需的。
[0044]
本文中使用的关于信号的术语“传递(communicating)”包括发射信号和/或接收信号。例如,能够传递信号的装置可以包括用于发射信号的发射机和/或用于接收信号的接收机。动词“传递”可以用来指发射动作或接收动作。在一个示例中,短语“传递信号”可以指由发射机发射信号的动作,并且可能不一定包括由接收机接收信号的动作。在另一个示例中,短语“传递信号”可以指由接收机接收信号的动作,并且可能不一定包括由发射机发射信号的动作。
[0045]
本文使用的术语“天线”可包括一个或多个天线元件、部件、单元、组件和/或阵列的任何合适的配置、结构和/或布置。在一些方面中,天线可以使用单独的发射天线元件和接收天线元件来实现发射功能和接收功能。在一些方面中,天线可以使用共同的和/或集成的发射/接收元件来实现发射功能和接收功能。天线可包括例如相控阵天线、单个元件天线、一组切换波束天线等。在一个示例中,天线可以被实现为单独的元件或集成元件,例如被实现为模块上(on-module)天线、片上(on-chip)天线、或根据任何其他的天线架构。
[0046]
本文描述了关于rf雷达信号的一些说明性方面。然而,可以关于或结合任何其他雷达信号、无线信号、ir信号、声信号、光信号、无线通信信号、通信方案、网络、标准和/或协议来实现其他方面。例如,可以关于利用光信号和/或声信号的系统(例如,光检测测距(lidar)系统和/或声纳系统)来实现一些说明性方面。
[0047]
现在参考图1,图1示意性地图示根据一些说明性方面的实现雷达的交通工具100的框图。
[0048]
在一些说明性方面中,交通工具100可以包括汽车、卡车、摩托车、公共汽车、火车、空中交通工具、水上交通工具、推车、高尔夫球车、电动推车、道路代理、或任何其他交通工具。
[0049]
在一些说明性方面中,交通工具100可以包括雷达设备101,例如,如下文所述。例如,雷达设备101可以包括雷达检测设备、雷达感测设备、雷达传感器等,例如,如下文所述。
[0050]
在一些说明性方面,雷达设备101可以被实现为车载系统的一部分,例如,要在交通工具100中实现和/或安装的系统。
[0051]
在一个示例中,雷达系统101可以被实现为自主交通工具系统、自动驾驶系统、驾
驶员辅助和/或支持系统等的一部分。
[0052]
例如,雷达设备101可以被安装在交通工具100中以用于检测附近对象,例如以用于自主驾驶。
[0053]
在一些说明性方面中,雷达设备101可以被配置成用于例如使用rf和模拟链、电容器结构、大型螺旋变压器和/或任何其他电子或电气元件来检测交通工具100附近区域中(例如,在远的附近区域中和/或近的附近区域中)的目标,例如,如下文所述。在一个示例中,雷达设备101可以被安装到交通工具100上,例如,直接地被放置在交通工具100上,或被附接到交通工具100。
[0054]
在一些说明性方面中,交通工具100可以包括单个雷达设备101。在其他方面中,交通工具100可包括例如处于(例如,交通工具100周围的)多个位置处的多个雷达设备101。
[0055]
在一些说明性方面中,例如,由于雷达能够在几乎所有天气状况下操作的能力,雷达设备101可以被实现为用于驾驶员辅助和/或自主交通工具的传感器套件中的部件。
[0056]
在一些说明性方面中,雷达设备101可被配置成用于支持自主交通工具的使用,例如,如下文所述。
[0057]
在一个示例中,雷达设备101可确定与环境中的对象相对应的类别、位置、取向、速度、意图、对环境的感知理解和/或任何其他信息。
[0058]
在另一示例中,雷达设备101可被配置成确定用于一个或多个操作和/或任务(例如,路径规划和/或任何其他任务)的一个或多个参数和/或信息。
[0059]
在一些说明性方面中,雷达设备101可以被配置成用于通过测量目标的回波(反射率)并且例如主要是在距离、速度、方位角(azimuth)和/或仰角(elevation)方面对它们进行区分来映射场景,例如,如下文所述。
[0060]
在一些说明性方面中,雷达设备101可被配置成用于检测和/或感测位于交通工具100附近区域(例如,远的附近区域和/或近的附近区域)中的一个或多个对象,并被配置成用于提供关于这些对象的一个或多个参数、属性和/或信息。
[0061]
在一些说明性方面中,对象可以包括其他交通工具;行人;交通标志;交通灯;道路、道路要素(例如,人行道与道路交汇处、边缘线);危险(例如,轮胎、盒子、道路表面的裂缝);等等。
[0062]
在一些说明性方面中,关于对象的一个或多个参数、属性和/或信息可以包括对象距交通工具100的距离、对象相对于交通工具100的角度、对象相对于交通工具100的位置、对象相对于交通工具100的相对速率,等等。
[0063]
在一些说明性方面中,雷达设备101可以包括多输入多输出(mimo)雷达设备101,例如,如下文所述。在一个示例中,mimo雷达设备可被配置成用于利用“空间滤波”处理,例如,波束成形和/或任何其他机制,以用于发射(tx)信号和/或接收(rx)信号中的一者或两者。
[0064]
下文关于被实现为mimo雷达的雷达设备(例如,雷达设备101)描述一些说明性方面。然而,在其他方面中,雷达设备101可以被实现为利用多个天线元件的任何其他类型的雷达,例如,单输入多输出(single input multiple output,simo)雷达或多输入单输出(multiple input single output,miso)雷达。
[0065]
可以关于被实现为mimo雷达的雷达设备(例如,雷达设备101)来实现一些说明性
方面,例如,如下文所述。然而,在其他方面中,雷达设备101可以被实现为任何其他类型的雷达,例如,电子波束操控雷达、合成孔径雷达(synthetic aperture radar,sar)、根据环境和/或自我状态改变其传输的自适应和/或认知雷达、反射阵列雷达等。
[0066]
在一些说明性方面中,雷达设备101可包括天线布置102、被配置成用于经由天线布置102传递雷达信号的雷达前端103、以及被配置成用于基于雷达信号来生成雷达信息的雷达处理器104,例如,如文下所述。
[0067]
在一些说明性方面中,雷达处理器104可以被配置成用于处理雷达设备101的雷达信息和/或控制雷达设备101的一个或多个操作,例如,如下文所述。
[0068]
在一些说明性方面中,雷达处理器104可以包括电路和/或逻辑,或者可以部分地或完全由电路和/或逻辑来实现,该电路和/或逻辑例如,包括电路和/或逻辑的一个或多个处理器、存储器电路和/或逻辑。附加地或替代地,雷达处理器104的一个或多个功能可以由逻辑实现,该逻辑可以由机器和/或一个或多个处理器执行,例如,如下文所述。
[0069]
在一个示例中,雷达处理器104可包括(例如,耦合到一个或多个处理器的)至少一个存储器,该存储器可以被配置成例如用于至少临时地存储由一个或多个处理器和/或电路处理的信息中的至少一些信息,和/或可被配置成用于存储要由处理器和/或电路利用的逻辑。
[0070]
在其他方面中,雷达处理器104可由交通工具100的一个或多个附加的或替代的元件实现。
[0071]
在一些说明性方面中,雷达前端103可包括例如一个或多个(雷达)发射机和一个或多个(雷达)接收机,例如,如下文所述。
[0072]
在一些说明性方面中,天线布置102可包括用于传递雷达信号的多个天线。例如,天线布置102可以包括采用发射天线阵列形式的多个发射天线和采用接收天线阵列形式的多个接收天线。在另一示例中,天线布置102可以包括既被用作发射天线又被用作接收天线的一个或多个天线。在后一情况下,雷达前端103例如可以包括双工器(例如,用于将所发射的信号与所接收的信号分开的电路)。
[0073]
在一些说明性方面中,如图1中所示,雷达前端103和天线布置102可例如由雷达处理器104控制,以发射无线电发射信号105。
[0074]
在一些说明性方面中,如图1中所示,无线电发射信号105可被对象106反射,从而得到回波107。
[0075]
在一些说明性方面中,雷达设备101可以(例如,经由天线布置102和雷达前端103)接收回波107,并且雷达处理器104可以例如通过计算与对象106例如相对于交通工具100的位置、径向速度(多普勒)、和/或方向有关的信息来生成雷达信息。
[0076]
在一些说明性方面,雷达处理器104可被配置成用于将雷达信息提供给交通工具100的交通工具控制器108,例如以用于交通工具100的自主驾驶。
[0077]
在一些说明性方面中,雷达处理器104的功能的至少一部分可以被实现为交通工具控制器108的一部分。在其他的方面中,雷达处理器104的功能可以被实现为雷达设备101和/或交通工具100的任何其他元件的一部分。在其他的方面中,雷达处理器104可以被实现为雷达设备101和/或交通工具100的任何其他元件的分开的部分或一部分。
[0078]
在一些说明性方面中,交通工具控制器108可以被配置成用于控制交通工具100的
一个或多个功能、操作模式、部件、设备、系统和/或元件。
[0079]
在一些说明性方面中,交通工具控制器108可以被配置成用于控制交通工具100的一个或多个车载系统,例如,如下文所述。
[0080]
在一些说明性方面中,车载系统可以包括例如交通工具100的转向系统、制动系统、驱动系统和/或任何其他系统。
[0081]
在一些说明性方面中,交通工具控制器108可以被配置成用于控制雷达设备101,和/或用于处理来自雷达设备101的一个或多个参数、属性和/或信息。
[0082]
在一些说明性方面中,交通工具控制器108可以被配置成用于例如基于来自雷达设备101和/或交通工具100的一个或多个其他传感器(例如,光检测和测距(lidar)传感器、相机传感器等)的雷达信息来例如控制交通工具100的车载系统。
[0083]
在一个示例中,交通工具控制器108可以例如基于来自雷达设备101的信息(例如,基于由雷达设备101检测到的一个或多个对象)来控制交通工具100的转向系统、制动系统和/或任何其他车载系统。
[0084]
在其他方面中,交通工具控制器108可以被配置成用于控制交通工具100的任何附加的或替代的功能。
[0085]
本文关于在交通工具(例如,交通工具100)中实现的雷达设备101描述了一些说明性实施例。在其他方面中,雷达设备(例如,雷达设备101)可被实现为交通系统或网络的任何其他元件的一部分,例如,被实现为道路基础设施的一部分和/或交通网络或系统的任何其他元件。其他方面可以相对于任何其他系统、环境和/或装置来实现,该任何其他系统、环境和/或设备可以在任何其他对象、环境、位置或地方中实现。例如,雷达设备101可以是非车载设备的一部分,该非车载设备可例如在室内位置、室外固定基础设施或任何其他位置中实现。
[0086]
在一些说明性方面中,雷达设备101可被配置成用于支持安全使用。在一个示例中,雷达设备101可被配置成用于确定操作的性质(例如,人类进入、动物进入、环境运动等)以标识检测到的事件的威胁级别,和/或任何其他附加或替代的操作。
[0087]
可以关于任何其他附加或替代设备和/或系统(例如,机器人)实现一些说明性方面,例如,如下文所述。
[0088]
在其他方面中,雷达设备101可被配置成用于支持任何其他用途和/或应用。
[0089]
现在参考图2,图2示意性地图示出根据一些说明性方面的实现雷达的机器人200的框图。
[0090]
在一些说明性方面中,机器人200可以包括机器人臂201。机器人200可以例如在工厂中被实现用于处置对象213,该对象213可以是例如应被固定到在正在制造的产品上的零件。机器人臂201可以包括多个可移动构件和支撑件205,多个可移动构件例如,可移动构件202、203、204。(例如,通过相关联的电机的致动)移动机器人臂201的可移动构件202、203和/或204可允许与环境进行物理交互以执行任务,例如,处置对象213。
[0091]
在一些说明性方面中,机器人臂201可以包括多个关节元件(例如,关节元件207、208、209),这些关节元件可以例如将构件202、203和/或204彼此连接,并与支撑件205连接。例如,关节元件207、208、209可以具有一个或多个关节,这些关节中的每一者可以向相关联的构件提供可旋转的运动(例如,旋转运动)和/或平移运动(例如,位移)和/或提供构件相
对于彼此的运动。可由合适的致动器发起构件202、203、204的移动。
[0092]
在一些说明性方面中,离支撑件205最远的构件(例如,构件204)也可以被称为末端执行器204,并且可以包括一个或多个工具,诸如,用于抓取对象的爪子、焊接工具等。可以利用其他构件(例如,更接近支撑件205的构件202、203)来改变末端执行器204(例如,在三维空间中)的位置。例如,机器人臂201可以被配置成用于与人类手臂类似地起作用,例如,可能在其末端处具有工具。
[0093]
在一些说明性方面中,机器人200可以包括(机器人)控制器206,该控制器被配置成用于根据控制程序,例如通过控制机器人臂的致动器来实现与环境的交互,例如以便根据要被执行的任务控制机器人臂201。
[0094]
在一些说明性方面中,致动器可包括适于响应于被驱动而影响机制或过程的部件。致动器可以通过执行机械移动来对由控制器206给出的命令(所谓的激活)进行响应。这意味着致动器(通常是电机(或机电转换器))可以被配置成用于在其被激活(即,被致动)时将电能转化为机械能。
[0095]
在一些说明性方面中,控制器206可以与机器人200的雷达处理器210进行通信。
[0096]
在一些说明性方面中,雷达前端211和雷达天线布置212可以被耦合到雷达处理器210。在一个示例中,雷达前端211和/或雷达天线布置212可以例如作为机器人臂201的一部分被包括。
[0097]
在一些说明性方面中,雷达前端211、雷达天线布置212和雷达处理器210可以作为雷达设备而操作,和/或可以被配置成用于形成雷达设备。例如,天线布置212可以被配置成用于执行天线布置102(图1)的一个或多个功能,雷达前端211可以被配置成用于执行雷达前端103(图1)的一个或多个功能,和/或雷达处理器210可以被配置成用于执行雷达处理器104(图1)的一个或多个功能,例如,如上文所述。
[0098]
在一些说明性方面中,例如,雷达前端211和天线布置212可以例如由雷达处理器210控制,以发射无线电发射信号214。
[0099]
在一些说明性方面中,如图2中所示,无线电发射信号214可被对象213反射,从而得到回波215。
[0100]
在一些说明性方面中,回波215可以(例如,经由天线布置212和雷达前端211)被接收,并且雷达处理器210可以例如通过计算与对象213例如相对于机器人臂201的位置、速率(多普勒)和/或方向有关的信息来生成雷达信息。
[0101]
在一些说明性方面中,雷达处理器210可以被配置成用于向机器人臂201的机器人控制器206提供雷达信息,例如,以控制机器人臂201。例如,机器人控制器206可以被配置成用于基于雷达信息来控制机器人臂201,例如,以抓取对象213和/或以执行任何其他操作。
[0102]
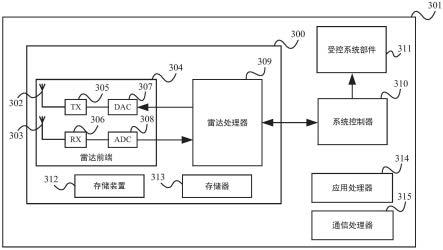
参考图3,图3示意性地图示出根据一些说明性方面的雷达装置300。
[0103]
在一些说明性方面中,雷达装置300可以被实现为设备或系统301的一部分,例如,如下文所述。
[0104]
例如,雷达装置300可以被实现为上文参考图1和/或图2描述的设备或系统的部分,和/或可以被配置成用于执行所述设备或系统的一个或多个操作和/或功能。在其他方面中,雷达装置300可以被实现为任何其他设备或系统301的部分。
[0105]
在一些说明性方面中,雷达设备300可以包括天线布置,该天线布置可以包括一个
或多个发射天线302和一个或多个接收天线303。在其他方面中,可以实现任何其他天线布置。
[0106]
在一些说明性方面中,雷达设备300可以包括雷达前端304和雷达处理器309。
[0107]
在一些说明性方面中,如图3中所示,一个或多个发射天线302可以与雷达前端304的发射机(或发射机布置)305耦合;和/或一个或多个接收天线303可以与雷达前端304的接收机(或接收机布置)306耦合,例如,如下文所述。
[0108]
在一些说明性方面中,发射机305可以包括一个或多个元件,例如,振荡器、功率放大器和/或被配置成用于生成要由一个或多个发射天线302发射的无线电发射信号的一个或多个其他元件,例如,如下文所述。
[0109]
在一些说明性方面中,例如,雷达处理器309可以向雷达前端304提供数字雷达发射数据值。例如,雷达前端304可以包括用于将数字雷达发射数据值转换为模拟发射信号的数模转换器(digital-to-analog converter,dac)307。发射机305可以将模拟发射信号转换为将由发射天线302发射的无线电发射信号。
[0110]
在一些说明性方面中,接收机306可以包括一个或多个元件,例如,一个或多个混合器、一个或多个滤波器和/或被配置成用于对经由一个或多个接收天线303接收到的无线电信号进行处理、降频转换(down-convert)的一个或多个其他元件,例如,如下文所述。
[0111]
在一些说明性方面中,例如,接收机306可以将经由一个或多个接收天线303接收到的无线电接收信号转换成模拟接收信号。雷达前端304可以包括用于基于模拟接收信号来生成数字雷达接收数据值的模数转换器(analog-to-digital conveter,adc)308。例如,雷达前端304可以向雷达处理器309提供数字雷达接收数据值。
[0112]
在一些说明性方面中,雷达处理器309可以被配置成用于处理数字雷达接收数据值,例如,以检测(例如,设备/系统301的环境中的)一个或多个对象。该检测可以包括,例如,确定包括一个或多个对象(例如,相对于系统301)的距离、速率(多普勒)、方向、和/或任何其他信息的信息。
[0113]
在一些说明性方面中,雷达处理器309可以被配置成用于向设备/系统301的系统控制器310提供所确定的雷达信息。例如,系统控制器310可以包括交通工具控制器(例如,如果设备/系统301包括车载设备/系统)、机器人控制器(例如,如果设备/系统301包括机器人设备/系统)或用于任何其他类型的设备/系统301的任何其他类型的控制器。
[0114]
在一些说明性方面中,系统控制器310可以被配置成用于(例如,通过一个或多个相应的致动器)控制系统301的一个或多个受控系统部件311,例如,电机、制动器、转向器等。
[0115]
在一些说明性方面中,雷达设备300可以包括例如用于存储由雷达300处理的信息(例如,正在由雷达处理器309处理的数字雷达接收数据值、由雷达处理器309生成的雷达信息、和/或要由雷达处理器309处理的任何其他数据)的存储装置312或存储器313。
[0116]
在一些说明性方面中,设备/系统301可以包括例如应用处理器314和/或通信处理器315,例如,用于至少部分地实现系统控制器310的一个或多个功能和/或用于执行系统控制器310、雷达设备300、受控系统部件311、和/或设备/系统301的一个或多个附加元件之间的通信。
[0117]
在一些说明性方面中,雷达设备300可以被配置成用于以可以支持对距离、速率
和/或方向的确定的形式来生成和发射无线电发射信号,例如,如下文所述。
[0118]
例如,雷达的无线电发射信号可以被配置成用于包括多个脉冲。例如,脉冲传输可以包括结合雷达设备监听回波期间的时间的短高功率猝发的传输。
[0119]
例如,为了更优化地支持(例如,汽车场景中的)高度动态的情况,连续波(continuous wave,cw)可以替代地被用作无线电发射信号。然而,(例如,具有恒定频率的)连续波可以支持速度确定,但是可能(例如,由于缺乏可以允许距离计算的时间标记)不允许距离确定。
[0120]
在一些说明性方面中,无线电发射信号105(图1)可以根据诸如例如频率调制连续波(frequency-modulated continuous wave,fmcw)雷达、相位调制连续波(phase-moduated continuous wave,pmcw)雷达、正交频分复用(orthogonal frequency division multiplexing,ofdm)雷达之类的技术和/或可以支持对距离、速度和/或方向的确定的任何其他类型的雷达技术来发射,例如,如下文所述。
[0121]
参考图4,图4示意性地图示出根据一些说明性方面的fmcw雷达装置。
[0122]
在一些说明性方面中,fmcw雷达装置400可以包括雷达前端401和雷达处理器402。例如,雷达前端304(图3)可以包括雷达前端401的一个或多个元件,和/或可以执行雷达前端401的一个或多个操作和/或功能;和/或雷达处理器309(图3)可以包括雷达处理器402的一个或多个元件,和/或可以执行雷达处理器402的一个或多个操作和/或功能。
[0123]
在一些说明性方面中,fmcw雷达设备400可以被配置成用于根据fmcw雷达技术来传递无线电信号,例如,而不是发送具有恒定频率的无线电发射信号。
[0124]
在一些说明性方面中,无线电前端401可以被配置成用于例如周期性地例如根据锯齿波形403提升和重置发射信号的频率。在其他方面中,可以使用三角形波形,或任何其他合适的波形。
[0125]
在一些说明性方面中,例如,雷达处理器402可以被配置成用于例如以数字形式(例如,作为数字值的序列)向前端401提供波形403。
[0126]
在一些说明性方面中,雷达前端401可以包括用于将波形403转换成模拟形式,并用于将其提供给压控振荡器405的dac 404。例如,振荡器405可以被配置成用于生成输出信号,该输出信号可以根据波形403进行频率调制。
[0127]
在一些说明性方面中,振荡器405可以被配置成用于生成包括无线电发射信号的输出信号,该输出信号可以被馈送到一个或多个发射天线406并被这一个或多个发射天线406发出。
[0128]
在一些说明性方面中,由振荡器405生成的无线电发射信号可以具有啁啾(chirp)序列407的形式,啁啾序列407可以是正弦波与锯齿波形403的调制的结果。
[0129]
在一个示例中,啁啾407可以与由锯齿波形403的“齿”(例如,从最小频率到最大频率)频率调制的振荡器信号的正弦波相对应。
[0130]
在一些说明性方面中,fmcw雷达设备400可以包括用于接收无线电接收信号的一个或多个接收天线408。无线电接收信号例如除了基于任何噪声、干扰等之外还可以基于无线电发射信号的回波。
[0131]
在一些说明性方面中,雷达前端401可以包括用于将无线电发射信号与无线电接收信号混合成混合信号的混合器409。
[0132]
在一些说明性方面中,雷达前端401可以包括可以被配置成用于过滤来自混合器409的混合信号以提供经过滤的信号的滤波器(例如,低通滤波器(low pass filter,lpf)410)。例如,雷达前端401可以包括用于将经过滤的信号转换为可以被提供给雷达处理器402的数字接收数据值的adc 411。在另一个示例中,滤波器410可以是数字滤波器,并且adc 411可以被布置在混合器409与滤波器410之间。
[0133]
在一些说明性方面中,雷达处理器402可以被配置成用于处理数字接收数据值以提供例如包括一个或多个对象的距离、速率(速度/多普勒)和/或方向(aoa)信息的雷达信息。
[0134]
在一些说明性方面中,雷达处理器402可以被配置成用于执行第一快速傅里叶变换(fft)(也称为“距离fft”)以提取可用于提取距离信息的延迟响应,和/或第二fft(也称为“多普勒fft”)以从数字接收数据值提取可用于提取速度信息的多普勒移位响应。
[0135]
在其他方面中,可以利用任何其他附加或替代方法来提取距离信息。在一个示例中,在数字雷达的实现方式中,可以例如根据所匹配的滤波器的实现方式使用与所发射的信号的相关性。
[0136]
参考图5,图5示意性地图示出根据一些说明性方面的可被实现为用于从数字接收雷达数据值中提取距离和速率(多普勒)估计的提取方案。例如,雷达处理器104(图1)、雷达处理器210(图2)、雷达处理器309(图3)和/或雷达处理器402(图4)可被配置成用于根据图5的提取方案的一个或多个方面从数字接收雷达数据值提取距离和/或速率(多普勒)估计。
[0137]
在一些说明性方面中,如图5中所示,(例如,包括无线电发射信号的回波的)无线电接收信号可以由接收天线阵列501接收。无线电接收信号可由无线电雷达前端502处理以生成数字接收数据值,例如,如上文所述。无线电雷达前端502可以将数字接收数据值提供给雷达处理器503,该雷达处理器503可以对数字接收数据值进行处理以提供雷达信息,例如,如上文所述。
[0138]
在一些说明性方面中,数字接收数据值可以以数据立方体504的形式表示。例如,数据立方体504可以包括无线电接收信号的数字化样本,该无线电接收信号基于从发射天线发射并由m个接收天线接收到的无线电信号。在一些说明性方面中,例如,关于mimo实现方式,可以存在多个发射天线,并且样本的数量可以相应地被相乘。
[0139]
在一些说明性方面中,数据立方体504的层(例如,数据立方体504的水平层)可以包括天线(例如,m个天线中的相应天线)的样本。
[0140]
在一些说明性方面中,数据立方体504可以包括针对k个啁啾的样本。例如,如图5中所示,啁啾的样本可被布置在所谓的“慢时间”方向上。
[0141]
在一些说明性方面中,数据立方体504可以包括针对啁啾(例如,每个啁啾)的l个样本(例如,l=512或任何其他数量的样本)。例如,如图5中所示,每个啁啾的样本可被布置在数据立方体504的所谓的“快时间”方向上。
[0142]
在一些说明性方面中,雷达处理器503可以被配置成用于通过第一fft处理多个样本,例如,针对每个啁啾和针对每个天线收集到的l个样本。例如,可以针对每个啁啾和每个天线执行第一fft,使得通过第一fft处理数据立方体504得到的结果可以再次具有三个维度,并且可以具有数据立方体504的大小,同时包括针对l个距离仓(bin)的值(例如,而不是针对l个采样时间的值)。
[0143]
在一些说明性方面中,雷达处理器503可以被配置成用于处理由第一fft处理数据立方体504得到的结果(例如,通过例如针对每个天线和针对每个距离仓根据第二fft沿啁啾处理该结果)。
[0144]
例如,第一fft可以在“快时间”方向上,而第二fft可以在“慢时间”方向上。
[0145]
在一些说明性方面中,第二fft的结果可以提供(例如,当其在天线上进行聚合时)距离/多普勒(r/d)图谱505。r/d图谱可以具有fft峰值506,例如,该fft峰值506包括针对某些距离/速率组合(例如,针对距离/多普勒仓)的fft输出值(用绝对值来表示)的峰值。例如,距离/多普勒仓可以与距离仓和多普勒仓相对应。例如,雷达处理器503可以将峰值视为潜在地与具有例如对应于该峰值的距离仓和速率仓的距离和速度的对象相对应。
[0146]
在一些说明性方面中,图5的提取方案可以针对fmcw雷达(例如,fmcw雷达400(图4))来实现,如上所述。在其他方面中,图5的提取方案可以针对任何其他雷达类型来实现。在一个示例中,雷达处理器503可以被配置成用于从pmcw雷达、ofdm雷达或任何其他雷达技术的数字接收数据值确定距离/多普勒图谱505。例如,在自适应或认知雷达中,帧中的脉冲、波形和/或调制可以(例如,根据环境)随时间改变。
[0147]
返回参考图3,在一些说明性方面中,接收天线布置303可以使用具有多个接收天线(或接收天线元件)的接收天线阵列来实现。例如,雷达处理器309可被配置成用于确定所接收的无线电信号(例如,回波105(图1)和/或回波215(图2))的到达角。例如,雷达处理器309可以被配置成用于例如基于所接收的无线电信号的到达角来确定所检测到的对象(例如,相对于设备/系统301)的方向,例如,如下文所述。
[0148]
参考图6,图6示意性地图示出根据一些说明性方面的可被实现为基于由接收天线阵列600接收到的传入无线电信号来确定到达角(aoa)信息的角度确定方案。
[0149]
图6描绘了基于在接收天线阵列处接收的信号的角度确定方案。在一些说明性方面中,例如,在虚拟mimo阵列中,角度确定也可以基于由tx天线阵列发射的信号。
[0150]
图6描绘了一维角度确定方案。可以实现其他多维角度确定方案,例如,二维方案或三维方案。
[0151]
在一些说明性方面中,如图6中所示,接收天线阵列600可以包括m个天线(从左到右编号为1到m)。
[0152]
如图6中的箭头所示,假定回波来自位于左上方方向上的对象。相应地,回波(例如,传入的无线电信号)的方向可以是朝向右下方。根据该示例,接收天线越靠左边,它就将越早接收传入的无线电信号的某个相位。
[0153]
例如,可以确定接收天线阵列601的两个天线之间的相位差(表示为),例如,如下:其中λ表示传入的无线电信号的波长,d表示两个天线之间的距离,并且θ表示传入的无线电信号例如相对于阵列的法线方向的到达角。
[0154]
在一些说明性方面中,雷达处理器309(图3)可被配置成用于利用传入的无线电信号的相位和角度之间的此种关系,例如以便例如通过在天线上执行fft(例如,第三fft(“角度fft”))来确定回波的到达角。
[0155]
在一些说明性方面中,(例如,以具有多个发射天线的天线阵列的形式的)多个发射天线可用于例如增加空间分辨率,例如,以提供高分辨率雷达信息。例如,mimo雷达设备可以利用虚拟mimo雷达天线,该虚拟mimo雷达天线可以形成为相卷积的多个发射天线与多个接收天线的卷积。
[0156]
参考图7,图7示意性地图示出根据一些说明性方面的可以基于发射(tx)和接收(rx)天线的组合来实现的mimo雷达天线方案。
[0157]
在一些说明性方面中,如图7中所示,雷达mimo布置可以包括发射天线阵列701和接收天线阵列702。例如,一个或多个发射天线302(图3)可以被实现为包括发射天线阵列701,和/或一个或多个接收天线303(图3)可以被实现为包括接收天线阵列702。
[0158]
在一些说明性方面中,可以利用包括既用于发射无线电发射信号又用于接收无线电发射信号的回波的多个天线的天线阵列来提供多个虚拟信道,如图7中的虚线所图示。例如,虚拟信道可以被形成为例如表示mimo雷达的虚拟引导向量的、发射天线与接收天线之间的卷积(例如,作为克罗内克(kronecker)积)。
[0159]
在一些说明性方面中,发射天线(例如,每个发射天线)可以被配置成用于发出(例如,具有与相应发射天线相关联的相位的)各个无线电发射信号。
[0160]
例如,n个发射天线和m个接收天线的阵列可以被实现为用于提供大小为n
×
m的虚拟mimo阵列。例如,虚拟mimo阵列可以根据应用于tx和rx引导向量的克罗内克积运算而形成。
[0161]
图8是根据一些说明性方面的雷达前端804和雷达处理器834的示意性框图图示。例如,雷达前端103(图1)、雷达前端211(图2)、雷达前端304(图3)、雷达前端401(图4)、和/或雷达前端502(图5)可以包括雷达前端804的一个或多个元件,和/或可以执行雷达前端804的一个或多个操作和/或功能。
[0162]
在一些说明性方面中,雷达前端804可以被实现为利用mimo雷达天线881的mimo雷达的一部分,mimo雷达天线881包括:多个tx天线814,该多个tx天线814被配置成用于发射多个tx rf信号(也被称为“tx雷达信号”);以及多个rx天线816,该多个rx天线816被配置成用于例如基于tx雷达信号接收多个rx rf信号(也被称为“rx雷达信号”),例如,如以下所述。
[0163]
在一些说明性方面中,mimo天线阵列881、天线814、和/或天线816可以包括适于发射和/或接收雷达信号的任何类型的天线或可以是适于发射和/或接收雷达信号的任何类型的天线的一部分。例如,mimo天线阵列881、天线814、和/或天线816可以被实现为一个或多个天线元件、部件、单元、组件和/或阵列的任何合适的配置、结构和/或布置的一部分。例如,mimo天线阵列881、天线814、和/或天线816可以被实现为相控阵天线、多元件天线、一组切换波束天线等的一部分。在一些方面中,mimo天线阵列881、天线814、和/或天线816可以被实现为使用分开的发射和接收天线元件来支持发射和接收功能。在一些方面中,mimo天线阵列881、天线814、和/或天线816可以被实现为使用共同的和/或集成的发射/接收元件来支持发射和接收功能。
[0164]
在一些说明性方面中,mimo雷达天线881可以包括矩形mimo天线阵列,和/或例如形状被设计为适合交通工具设计的弯曲的阵列。在其他方面中,mimo雷达天线881的任何其他形式、形状和/或布置可以被实现。
[0165]
在一些说明性方面中,雷达前端804可包括一个或多个无线电,该一个或多个无线电被配置成用于经由tx天线814生成和发射tx rf信号;和/或用于处理经由rx天线816接收到的rx rf信号,例如,如下文所述。
[0166]
在一些说明性方面中,雷达前端804可包括至少一个发射机(tx)883,该至少一个发射机(tx)883包括被配置成用于经由tx天线814生成和/或发射tx雷达信号的电路和/或逻辑。
[0167]
在一些说明性方面中,雷达前端804可以包括至少一个接收机(rx)885,该至少一个接收机(rx)885包括用于例如基于tx雷达信号来接收和/或处理经由rx天线816接收到的rx雷达信号的电路和/或逻辑。
[0168]
在一些说明性方面中,发射机883和/或接收机885可以包括:电路;逻辑;射频(rf)元件、电路和/或逻辑;基带元件、电路和/或逻辑;调制元件、电路和/或逻辑;解调元件、电路和/或逻辑;放大器;模数转换器和/或数模转换器;滤波器等等。
[0169]
在一些说明性方面中,发射机883可以包括多个tx链810,该多个tx链810被配置成用于(例如,分别地)经由tx天线814生成和发射tx rf信号;和/或接收机885可以包括多个rx链812,该多个rx链812被配置成用于(例如,分别地)接收和处理经由rx天线816接收到的rx rf信号。
[0170]
在一些说明性方面中,雷达处理器834可以被配置成用于例如基于由mimo雷达881传递的雷达信号来生成雷达信息813,例如,如下文所述。例如,雷达处理器104(图1)、雷达处理器210(图2)、雷达处理器309(图3)、雷达处理器402(图4)、和/或雷达处理器503(图5)可以包括雷达处理器834的一个或多个元件,和/或可以执行雷达处理器834的一个或多个操作和/或功能。
[0171]
在一些说明性方面中,雷达处理器834可以被配置成用于例如基于从多个rx链812接收到的雷达rx数据811来生成雷达信息813。例如,雷达rx数据811可以基于经由rx天线816接收到的雷达rx rf信号。
[0172]
在一些说明性方面中,雷达处理器834可以包括输入端832,该输入端832用于从多个rx链812接收例如包括雷达rx数据811的雷达输入数据。
[0173]
在一些说明性方面中,雷达处理器834可以包括电路和/或逻辑,或者可以部分地或完全由电路和/或逻辑实现,该电路和/或逻辑例如,包括电路和/或逻辑的一个或多个处理器、存储器电路和/或逻辑。附加地或替代地,雷达处理器834的一个或多个功能可以由逻辑实现,该逻辑可以由机器和/或一个或多个处理器执行,例如,如下文所述。
[0174]
在一些说明性方面中,雷达处理器834可以包括至少一个处理器836,该至少一个处理器836可以被配置成用于例如处理雷达rx数据811,和/或用于执行一个或多个操作、方法、和/或算法。
[0175]
在一些说明性方面中,雷达处理器834可以包括例如耦合到处理器836的至少一个存储器838。例如,存储器838可以被配置成用于存储由雷达处理器834处理的数据。例如,存储器838可以(例如,至少暂时地)存储由处理器836处理的信息中的至少一些信息,和/或将由处理器836利用的逻辑。
[0176]
在一些说明性方面中,存储器838可以被配置成用于存储雷达数据的至少部分(例如,雷达rx数据的一些或雷达rx数据的全部)例如以供处理器836处理,例如,如下文所述。
[0177]
在一些说明性方面中,存储器838可以被配置成用于存储可以由处理器836例如在生成雷达信息813的过程期间生成的经处理的数据,例如,如下文所述。
[0178]
在一些说明性方面中,存储器838可以被配置成用于存储距离信息和/或多普勒信息,该距离信息和/或多普勒信息可由处理器836例如基于雷达rx数据生成,例如,如下文所述。在一个示例中,距离信息和/或多普勒信息可以基于互相关(cross-correlation,xcorr)操作来确定,该互相关(xcorr)操作可以应用于雷达rx数据。可以利用任何其他附加的或替代的操作、算法和/或过程来生成距离信息和/或多普勒信息。
[0179]
在一些说明性方面中,存储器838可以被配置成用于存储aoa信息,该aoa信息可由处理器836例如基于雷达rx数据、距离信息和/或多普勒信息生成,例如,如下文所述。在一个示例中,aoa信息可以基于aoa估计算法来确定。可以利用任何其他附加的或替代的操作、算法和/或过程来生成aoa信息。
[0180]
在一些说明性方面中,雷达处理器834可以被配置成用于生成包括距离信息、多普勒信息和/或aoa信息中的一者或多者的雷达信息813,例如,如下文所述。
[0181]
在一些说明性方面中,雷达信息813可以包括点云1(pc1)信息,例如,包括原始点云估计(例如,距离、径向速度、方位角和/或仰角)。
[0182]
在一些说明性方面中,雷达信息813可以包括点云2(pc2)信息,该点云2(pc2)信息可以例如基于pc1信息来生成。例如,pc2信息可以包括聚类信息、跟踪信息(例如,概率跟踪和/或密度函数)、边界框信息、分类信息、取向信息等。
[0183]
在一些说明性方面中,雷达处理器834可以被配置成用于以四维(4d)图像信息(例如,立方体)的形式生成可以表示与一个或多个检测到的目标相对应的4d信息的雷达信息813。
[0184]
在一些说明性方面中,4d图像信息可以包括例如(例如,基于距离信息的)距离值、(例如,基于多普勒信息的)速度值、(例如,基于方位角aoa信息的)方位角值、(例如,基于仰角aoa信息的)仰角值、和/或任何其他值。
[0185]
在一些说明性方面中,雷达处理器834可以被配置成用于以任何其他形式生成雷达信息813,和/或包括任何其他附加或替代信息。
[0186]
在一些说明性方面中,雷达处理器834可以被配置成用于将经由mimo雷达天线881传递的信号处理为由多个rx天线816和多个tx天线814的卷积形成的虚拟mimo阵列的信号。
[0187]
在一些说明性方面中,雷达前端804和/或雷达处理器834可以被配置成用于利用mimo技术,例如以支持减小的物理阵列孔径(例如,阵列大小)和/或利用减少数量的天线元件。例如,雷达前端804和/或雷达处理器834可以被配置成用于经由包括多个n个元件(例如,tx天线814)的tx阵列824发射正交信号,以及经由包括多个m个元件(例如,rx天线816)的rx阵列826处理接收到的信号。
[0188]
在一些说明性方面中,利用从具有n个元件的tx阵列824发射正交信号和在具有m个元件的rx阵列826中处理接收到的信号的mimo技术可以(例如,在远场近似下)等同于雷达利用从一个天线的发射以及利用n
×
m个天线进行的接收。例如,雷达前端804和/或雷达处理器834可以被配置成用于利用mimo天线阵列881作为具有n
×
m的等效阵列大小的虚拟阵列,该虚拟阵列可以将虚拟元件的位置例如定义为物理元件(例如,天线814和/或816)的位置的卷积。
[0189]
在一些说明性方面中,可能需要提供技术解决方案,以高效和/或准确地(例如,在多路径场景和/或环境中,例如,与自由空间场景和/或环境相比)检测目标的位置,例如,如下文所述。
[0190]
在一个示例中,例如,当信号在多路径环境中向期望目标方向发射时,发射信号的反射信号可以通过干扰对象。根据该示例,来自干扰对象的接收到的rx信号可能从各种方向到达,这可能导致虚假的到达角(aoa)估计。
[0191]
例如,由于来自护栏、建筑物、交通工具和/或其他干扰对象的反射,向期望目标方向发射的信号可从多个角度返回到雷达天线。
[0192]
在一些说明性方面中,包括rx天线816的rx阵列826可以与包括tx天线814的tx阵列824正交,例如,如下文所述。
[0193]
在一些说明性方面中,例如,当实现与具有可以等于多个tx雷达信号的一半波长的阵列间距的tx阵列(也称为“半波长/(λ/2)间距阵列”)正交的rx阵列时,可能需要解决一个或多个技术问题,例如,如下文所述。
[0194]
在一个示例中,由于λ/2间距阵列的波束图案可能不包含光栅波瓣(例如,各种角度中的寄生主波瓣),因此雷达天线可以能够(例如,一定程度上)衰减从干扰路径到达的rx信号。
[0195]
参考图9,图9示意性地图示了天线阵列900的布置,第一图表910描绘经由天线阵列900接收的第一rx雷达信号的第一相位,并且第二图表描绘经由天线阵列900接收的第二rx雷达信号的第二相位,用于演示根据一些说明性方面可以解决的技术问题。
[0196]
如图9中所示,天线阵列900可以包括tx阵列924和与tx阵列924正交的rx阵列926。
[0197]
如图9中所示,可以根据半波长阵列间距配置tx阵列924,和/或可以根据半波长阵列间距配置rx阵列926。
[0198]
如图9中所示,图表910描绘了例如基于从tx阵列924的tx天线元件对例如向自由空间环境中的目标的发射、经由rx阵列926接收的rx信号的第一相位和第二相位。
[0199]
如图9中所示,图表910描绘了例如基于从tx阵列924的tx天线元件(表示为tx5)发射的第一tx信号经由rx阵列926接收的第一rx信号的第一相位912。
[0200]
如图9中所示,图表910描绘了例如基于从tx阵列924的另一tx天线元件(表示为tx1)发射的第二tx信号、经由rx阵列926接收的第二rx信号的第二相位914。
[0201]
在一个示例中,可以模拟相位的类似行为,例如,关于tx阵列924的其他tx天线元件对,例如,tx对(tx2,tx6)、(tx3,tx7)和/或(tx4,tx8),例如,在自由空间环境中。
[0202]
如图9中所示,图表910描绘了相位912和914的串接916。
[0203]
如图9中所示,串接916可以产生单个曲线,例如,可以从该曲线(例如,准确地)估计目标的方向。
[0204]
如图9中所示,图表920描绘了例如基于从tx阵列924的tx天线元件对例如向多路径环境中的目标的发送、经由rx阵列926接收的rx信号的第一相位和第二相位。
[0205]
如图9中所示,图表920描绘了例如基于从tx阵列924的tx天线元件tx5发射的第一tx信号的、经由rx阵列926接收的第一rx信号的第一相位922。
[0206]
如图9中所示,图920描绘了例如基于从tx阵列924的tx天线元件tx1发射的第二tx信号的、经由rx阵列926接收的第二rx信号的第二相位924。
[0207]
在一个示例中,可以模拟相位的类似行为,例如,关于tx阵列924的其他tx天线元件对,例如,tx对(tx2,tx6)、(tx3,tx7)和(tx4,tx8),例如,在多路径环境中。
[0208]
如图9中所示,图表920描绘了相位922和924的串接926。
[0209]
如图9中所示,串接926可以不包括单个连续曲线。
[0210]
如图9中所示,例如,由于tx天线元件tx1和tx天线元件tx5之间的大距离,和/或由于来自虚假路径角度的能量的到达,可能在串接926中创建相位不连续性927。因此,在串接相位922和924之后,可能不会形成单个曲线,并且因此,aoa估计中可出现一个或多个误差。
[0211]
在一个示例中,天线阵列900的阵列拓扑除了例如对相位不连续性(例如,相位不连续性927)灵敏之外还可对来自道路的反射灵敏。例如,天线阵列900可以向道路传输大量能量,这可导致沿仰角维度的不期望的反射和假警报。例如,可以向道路传输大量能量,例如,tx阵列924的每个tx列内的tx元件之间相对小的距离可导致具有宽波束的小天线。
[0212]
在一些说明性方面中,可能需要提供技术解决方案,例如,以减轻或消除多路径效应,该多路径效应在串接rx信号的相位时可导致相位不连续性,例如,如下文所述。
[0213]
在一些说明性方面中,雷达天线881(图8)可包括阵列拓扑和/或布置,该阵列拓扑和/或布置可被配置成用于减少(例如,显著减少和/或减轻)多路径效应。
[0214]
参考图10,图10示意性地图示出根据一些说明性方面的包括雷达天线1000的装置1001。例如,装置1001可以包括雷达前端804(图8)的一个或多个元件,和/或可以执行雷达前端804(图8)的一个或多个操作和/或功能。例如,mimo雷达天线881(图8)可以包括雷达天线1000的一个或多个元件,和/或可以执行雷达天线1000的一个或多个操作和/或功能。
[0215]
在一些说明性方面中,如图10中所示,雷达天线1000可以包括tx天线阵列1020和rx天线阵列1040,例如,如下文所述。例如,tx阵列824(图8)可以包括tx天线阵列1020的一个或多个元件,和/或可以执行tx天线阵列1020的一个或多个操作和/或功能;和/或rx阵列826(图8)可以包括rx天线阵列1040的一个或多个元件,和/或可以执行rx天线阵列1040的一个或多个操作和/或功能。
[0216]
在一些说明性方面中,tx天线阵列1020可以被配置成用于发射多个tx雷达信号,例如,如下文所述。
[0217]
在一些说明性方面中,rx天线阵列1040可以被配置成例如基于多个tx雷达信号来接收多个rx雷达信号,例如,如下文所述。
[0218]
在一些说明性方面中,如图10中所示,rx天线阵列1040可以正交于tx天线阵列1020,例如,如下文所述。
[0219]
在一些说明性方面中,如图10中所示,tx天线阵列1020或rx天线阵列1040的第一阵列(例如,tx天线阵列1020)可以包括第一子阵列1022和与第一子阵列1022平行的第二子阵列1028,例如,如下文所述。
[0220]
在一些说明性方面中,在第一子阵列1022和第二子阵列1028之间的子阵列间距1045可以短于tx天线阵列1020或rx天线阵列1040的第二阵列的长度,例如,rx天线阵列1040的长度,例如,如下文所述。
[0221]
在一个示例中,子阵列间距1045可以维持rx天线阵列1040的天线元件与子阵列1022和/或1028的天线元件之间的阵列重叠,例如,如下文所述。
[0222]
在一些方面中,第一阵列可以包括tx天线阵列1020,并且第二阵列可以包括rx天
线阵列1040,例如,如图10中所示,并在下文中描述。
[0223]
在其他方面中,第一阵列可以包括rx天线阵列1040,并且第二阵列可以包括tx天线阵列1020。
[0224]
在一些说明性方面中,如图10中所示,第二阵列(例如,rx天线阵列1040)可以包括1d阵列,该1d阵列包括沿平行于第二阵列的轴线具有相同长度的多个天线元件,例如,如下文所述。
[0225]
在一些说明性方面中,如图10中所示,第二阵列(例如,rx天线阵列1040)的第一天线元件的中心与第二阵列的第二天线元件(可与第一天线元件相邻)的中心之间的距离可以等于多个tx雷达信号的波长的一半,例如,如下文所述。
[0226]
在一些说明性方面中,如图10中所示,第二阵列(例如,rx天线阵列1040)的天线元件1042沿平行于第二阵列的轴线的长度1041可以等于多个tx雷达信号的波长的一半,例如,如下文所述。
[0227]
在一些说明性方面中,如图10中所示,第一子阵列1022可以与第二子阵列1028相同,例如,如下文所述。
[0228]
在一些说明性方面中,如图10中所示,第一子阵列1022可以包括第一多个1d阵列,和/或第二子阵列1028可以包括第二多个1d阵列,例如,如下文所述。
[0229]
在一些说明性方面中,如图10中所示,第二阵列(例如,rx阵列1040)可以包括第三多个天线元件,例如,如下文所述。
[0230]
在一些说明性方面中,如图10中所示,多个1d阵列的中心可以与第二阵列的第三多个天线元件中的相应天线元件的中心对齐,例如,如下文所述。例如,第一子阵列1022的第一多个1d阵列的中心可以与rx阵列1040的第一相应天线元件的中心对齐,和/或第二子阵列1028的第二多个1d阵列的中心可以与rx阵列1040的第二相应天线元件的中心对齐。
[0231]
在一些说明性方面中,如图10中所示,第一子阵列1022的天线元件(例如,天线元件1023)和第二阵列1028的第一天线元件(例如,天线元件1042)之间的第一距离可以等于第二子阵列的天线元件(例如,天线元件1027)和第二阵列的第二天线元件(例如,天线元件1046)之间的第二距离,例如,如下文所述。
[0232]
在一些说明性方面中,如图10中所示,第二阵列的第一天线元件可以在第二子阵列1028的天线元件上方,和/或第二阵列的第二天线元件可以在第一子阵列1022的天线元件上方。例如,天线元件1042可以在天线元件1023上方,和/或天线元件1046可以在天线元件1027上方。
[0233]
在一些说明性方面中,如图10中所示,第一子阵列1022和/或第二子阵列1028可以包括多个1d阵列的交错布置,例如,如下文所述。例如,第一子阵列1022可以包括第一多个1d阵列的交错布置;和/或第二子阵列1028可以包括第二多个1d阵列的交错布置。
[0234]
在一些说明性方面中,如图10中所示,第一多个1d阵列可以包括第一1d阵列1032和第二1d阵列1034,第一1d阵列1032包括第一多个天线元件,第二1d阵列1034包括相对于第一多个天线元件交错的第二多个天线元件,例如,如下文所述。
[0235]
在一些说明性方面中,如图10中所示,第一1d阵列1032的开始和第二1d阵列1034的开始之间的1d阵列间距1035可以短于第一1d阵列1032的天线元件(例如,天线元件1033)的长度,例如,如下文所述。
[0236]
在一些说明性方面中,如图10中所示,第一1d阵列1032的开始和第二1d阵列1034的开始之间的1d阵列间距1035可以是天线元件1033的长度的一半,例如,如下文所述。
[0237]
在一些说明性方面中,如图10中所示,天线元件1033的长度可以等于多个tx雷达信号的波长(例如,λ);和/或第一1d阵列1032的开始和第二1d阵列1034的开始之间的1d阵列间距1035可以等于多个tx雷达信号的波长的一半(例如,λ/2),如下文所述。
[0238]
在一些说明性方面中,如图10中所示,可以例如沿平行于第一1d阵列1032的轴线定义1d阵列间距1035和天线元件1033的长度,例如,如下文所述。
[0239]
在一些说明性方面中,如图10中所示,第一1d阵列1032的天线元件(例如,天线元件1033)的宽度1037可以等于第二阵列1040的天线元件的长度1041,例如,如下文所述。
[0240]
在一些说明性方面中,如图10中所示,第一1d阵列1032的天线元件(例如,天线元件1033)的宽度1037可以等于多个tx雷达信号的波长的一半(例如,λ/2);和/或第二阵列1040的天线元件的长度1041可以等于多个tx雷达信号的波长的一半(例如,λ/2),例如,如下文所述。
[0241]
在一些说明性方面中,如图10中所示,第一1d阵列1032的天线元件的宽度1037和第二阵列1040的天线元件的长度1041可以例如沿平行于第二阵列1040的轴线定义,例如,如下文所述。
[0242]
在一些说明性方面中,如图10中所示,第一1d阵列1032的第一天线元件的中心与第一1d阵列1032的第二天线元件(与第一天线元件相邻)的中心之间的距离可以不大于多个tx雷达信号的波长(例如,λ),例如,如下文所述。
[0243]
在一些说明性方面中,装置1001可以包括控制器1050,该控制器1050被配置成用于控制雷达天线1000发射多个tx雷达信号。例如,雷达处理器834(图8)可以包括雷达控制器1050的一个或多个元件,和/或可以执行雷达控制器1050的一个或多个操作和/或功能。
[0244]
在一些说明性方面中,控制器1050可以被配置成用于控制tx天线阵列1020发射tx雷达信号的序列,例如,如下文所述。
[0245]
在一些说明性方面中,tx雷达信号的序列可以包括:经由第一子阵列1022的第一天线元件(例如,经由天线元件1023)的第一tx雷达信号;以及经由第二子阵列1028的第二天线元件(例如,经由天线元件1027)的第二tx雷达信号,例如,如下文所述。
[0246]
在一些说明性方面中,第二tx雷达信号可以与tx雷达信号序列中的第一tx雷达信号连续,例如,如下文所述。
[0247]
在一些说明性方面中,tx雷达信号的序列可以包括:经由第一子阵列1022的第三天线元件(例如,经由天线元件1033)的第三tx雷达信号;以及经由第二子阵列1028的第四天线元件(例如,经由天线元件1029)的第四tx雷达信号,例如,如下文所述。
[0248]
在一些说明性方面中,第四tx雷达信号可以与tx雷达信号序列中的第三tx雷达信号连续。
[0249]
在一些说明性方面中,tx雷达信号的序列可以包括tx雷达信号对的序列,例如,如下文所述。
[0250]
在一些说明性方面中,控制器1050可以被配置成用于控制tx天线阵列1020发射多个tx雷达信号对,例如,如下文所述。
[0251]
在一些说明性方面中,tx雷达信号对可以包括:经由第一子阵列1022的第一天线
元件(例如,经由天线元件1023)的第一tx雷达信号;以及经由第二子阵列1028的第二天线元件(例如,经由天线元件1027)的第二tx雷达信号,例如,如下文所述。
[0252]
在一些说明性方面中,第一天线元件相对于第一子阵列1022的中心的相对位置可以与第二天线元件相对于第二子阵列1028的中心的相对位置相同。例如,天线元件1023相对于第一子阵列1022的中心的相对位置可以与天线元件1027相对于第二子阵列1028的中心的相对位置相同。
[0253]
在一些说明性方面中,控制器1050可以被配置成用于确定雷达rx信号的相位之间的一个或多个相位重叠,例如,如下文所述。
[0254]
在一些说明性方面中,控制器1050可以被配置成用于控制tx天线阵列1020:经由第一子阵列1022的第一天线元件(例如,经由天线元件1023)发射第一tx雷达信号;以及经由第二子阵列1028的第二天线元件(例如,经由天线元件1027)发射第二tx雷达信号,例如,如下文所述。
[0255]
在一些说明性方面中,控制器1050可以被配置成用于例如通过基于第一tx雷达信号将第一权重应用于第一rx雷达信号的相位来确定第一加权相位,例如,如下文所述。
[0256]
在一些说明性方面中,控制器1050可以被配置成用于例如通过基于第二tx雷达信号将第二权重应用于第二rx雷达信号的相位来确定第二加权相位,例如,如下文所述。
[0257]
在一些说明性方面中,控制器1050可以被配置成用于例如基于第一加权相位和第二加权相位来确定第一雷达rx信号的第一相位和第二雷达rx信号的第二相位之间的相位重叠,例如,如下文所述。
[0258]
参考图11a,图11a示意性地图示了根据一些说明性方面的天线阵列1100的布置,并且参考图11b,图11b示意性地图示了根据一些说明性方面的描绘经由天线阵列1100接收的第一rx雷达信号的第一相位的第一图表1160、以及描绘经由天线阵列1100接收的第二rx雷达信号的第二相位的第二图表1170。例如,雷达天线1000(图10)可以包括雷达天线1100的一个或多个元件,和/或可以执行雷达天线1100的一个或多个操作和/或功能。
[0259]
在一些说明性方面中,如图11a中所示,雷达天线1100可以包括tx天线阵列1120和rx天线阵列1140,例如,如下文所述。例如,tx阵列1020(图10)可以包括tx天线阵列1120的一个或多个元件,和/或可以执行tx天线阵列1120的一个或多个操作和/或功能;和/或rx阵列1040(图10)可以包括rx天线阵列1140的一个或多个元件,和/或可以执行rx天线阵列1140的一个或多个操作和/或功能。
[0260]
在一些说明性方面中,如图11a中所示,rx天线阵列1140可以正交于tx天线阵列1120。
[0261]
在一些说明性方面中,tx天线阵列1020可以被配置成用于发射多个tx雷达信号。
[0262]
在一些说明性方面中,rx天线阵列可以被配置成基于多个tx雷达信号来接收多个rx雷达信号。
[0263]
在一些说明性方面中,如图11a中所示,tx天线阵列1120可以包括第一子阵列1122和(例如,平行于第一子阵列1122的)第二子阵列1128。
[0264]
在一些说明性方面中,如图11a中所示,第一子阵列1122和第二子阵列1128之间的子阵列间距1145可以短于rx天线阵列1140的长度。
[0265]
在一些说明性方面中,如图11a中所示,例如,rx天线阵列1140可以包括1d阵列,该
1d阵列包括(例如,沿平行于第二阵列的轴)例如具有相同长度的多个天线元件。
[0266]
在一些说明性方面中,如图11a中所示,rx天线阵列1140的第一天线元件的中心与rx天线阵列1140的第二天线元件(与第一天线元件相邻)的中心之间的距离可以等于多个tx雷达信号的波长的一半。
[0267]
在一些说明性方面中,如图11a中所示,rx天线阵列1140的天线元件沿平行于rx天线阵列1140的轴线的长度可以等于多个tx雷达信号的波长的一半。
[0268]
在一些说明性方面中,如图11a中所示,第一子阵列1122可以与第二子阵列1128相同。
[0269]
在一些说明性方面中,如图11a中所示,第一子阵列1122可以包括第一多个1d阵列,和/或第二子阵列1128可以包括第二多个1d阵列。
[0270]
在一些说明性方面中,如图11a中所示,rx阵列1140可以包括第三多个天线元件。
[0271]
在一些说明性方面中,如图11a中所示,第一和第二多个1d阵列的中心可以与rx阵列1140的第三多个天线元件中的相应天线元件的中心对齐。
[0272]
在一些说明性方面中,如图11a中所示,第一子阵列1122的天线元件(例如,表示为tx1的天线元件)和rx阵列1140的第一天线元件(例如,表示为rx1的天线元件)之间的第一距离可以等于第二子阵列1128的天线元件(例如,表示为tx5的天线元件)和rx阵列1140的第二天线元件(例如,表示为rx5的天线元件)之间的第二距离。
[0273]
在一些说明性方面中,如图11a中所示,rx阵列1140的天线元件rx1可以在tx阵列1120的天线元件tx1的上方,和/或rx阵列1140的天线元件rx5可以在tx阵列1120的天线元件tx5的上方。
[0274]
在一些说明性方面中,例如,当从tx阵列1120的天线元件tx1向自由空间环境中的目标发射、并且经由rx阵列1140的天线元件rx5接收时的相位和/或距离的总累加可以等于,例如,从tx阵列1120的天线元件tx5向自由空间环境中的目标发射、并且经由rx阵列1140的天线元件rx1接收时的相位和/或距离的总累加。
[0275]
在一些说明性方面中,例如,当从tx阵列1120的天线元件tx1向自由空间环境中的目标发射、并且经由rx阵列1140的天线元件rx6接收时的相位和/或距离的总累加可以等于,例如,当从tx阵列1120的天线元件tx5向自由空间环境中的目标发射、并且经由rx阵列1140的天线元件rx6接收时的相位和/或距离的总累加。
[0276]
在一些说明性方面中,例如,在自由空间环境中,可能存在由这些tx-rx对产生的相位之间的重叠,例如,如下文所述。
[0277]
在一些说明性方面中,图表1160描绘了例如经由天线阵列1100在自由空间环境中接收的rx信号的相位。
[0278]
在一些说明性方面中,如图11b中所示,图表1160描绘了例如在自由空间环境中、例如基于从tx阵列1120的tx天线元件tx5发射的第一tx信号的、经由rx阵列1140接收的第一rx信号的第一相位1162。
[0279]
在一些说明性方面中,如图11b中所示,图表1160描绘了例如在自由空间环境中、例如基于从tx阵列1120的tx天线元件tx1发射的第二tx信号的、经由rx阵列1140接收的第二rx信号的第二相位1164。
[0280]
在一些说明性方面中,如图11b中所示,例如,当串接相位1162和1164时,可以在第
一相位1162和第二相位1164之间创建相位重叠1165。
[0281]
在一些说明性方面中,例如,当基于一个或多个其他tx对(例如,(tx2,tx6)、(tx3,tx7)和/或(tx4,tx8))串接信号的相位时,可以创建类似的重叠。
[0282]
在一些说明性方面中,图表1170描绘了在多路径环境中接收的rx信号的相位。
[0283]
在一些说明性方面中,如图11b中所示,图表1170描绘了例如在多路径环境中、例如基于例如从tx阵列1120的tx天线元件tx5发射的第一tx信号的、经由rx阵列1140接收的第一rx信号的第一相位1172。
[0284]
在一些说明性方面中,如图11b中所示,图表1170描绘了例如在多路径环境中、例如基于从tx阵列1120的tx天线元件tx1发射的第二tx信号的、经由rx阵列1140接收的第二rx信号的第二相位1174。
[0285]
在一些说明性方面中,如图11b中所示,例如,当串接相位1172和1174时,可以创建相位不连续性1175。
[0286]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于例如在可用作参考的自由空间环境中、例如基于相位重叠1165来减轻或消除相位不连续性1175。
[0287]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于在一个或多个相位上应用加权求和,以提供更平滑的曲线,这可以实现改进的aoa估计,例如,如下文所述。
[0288]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于控制tx天线阵列1120经由天线元件tx1发射第一tx雷达信号,并经由天线元件tx5发射第二tx雷达信号。
[0289]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于例如通过向经由天线元件rx5接收的第一rx雷达信号的相位(表示为pa)应用第一权重来确定第一加权相位,并且可以基于经由天线元件tx1的第一tx雷达信号。
[0290]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于例如通过向经由天线元件rx1接收的第二rx雷达信号的相位(表示为pc)应用第二权重来确定第二加权相位,并且可以基于经由天线元件tx5的第二tx雷达信号。
[0291]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于例如基于第一加权相位和第二加权相位来确定第一相位pa和第二相位pc之间的相位重叠1177。
[0292]
在一些说明性方面中,如图11b中所示,可以对相位值pa-pc使用约70%-30%的权重划分,例如,以确定相位重叠1777。
[0293]
在其他方面中,任何其他权重划分可应用于相位值pa和pc,例如,以确定相位重叠1777。
[0294]
在一些说明性方面中,控制器(例如,控制器1050(图10))可以被配置成用于例如基于第三rx雷达信号的第一相位(表示为pb)和第四rx雷达信号的第二相位(表示为pd))来确定第二加权相位1779,例如,类似于相位重叠1777。
[0295]
在一些说明性方面中,如图11a中所示,第一子阵列1122和/或第二子阵列1128可以包括多个1d阵列的交错布置。
[0296]
在一些说明性方面中,如图11a中所示,多个1d阵列可以包括第一1d阵列1132和第
interval,pri),这可导致折叠的目标以不同的速率出现在每一帧中。例如,对帧之间的速度跳跃的分析可以允许确定正确的速度。
[0313]
在另一示例中,单帧方法可以基于例如蛮力计算,该蛮力计算可以处置所有可能的速率假设,例如,以允许稍后阶段选择正确的速度。
[0314]
根据这些示例,多帧方法和/或单帧方法可以是复杂的,和/或可需要大量计算资源。
[0315]
在一些说明性方面中,可能需要提供例如用于目标速度估计的技术解决方案,例如,目标速度估计可以利用天线阵列(例如,天线阵列1000(图10)和/或天线阵列1100(图11a))的行-列结构,例如,如下文所述。
[0316]
例如,一种或多种目标速度估计方法可以不考虑天线阵列的行-列结构,并且因此,可需要大量计算资源,例如,用于目标速度估计。
[0317]
在一些说明性方面中,雷达处理器834可以被配置成用于实现和/或支持速度估计算法,该速度估计算法可以被配置成用于利用雷达天线881的阵列拓扑,例如,根据天线阵列1000(图10)和/或天线阵列1100(图11a)的拓扑,例如,如下文所述。
[0318]
在一些说明性方面中,速度估计算法可以允许检测快速移动目标,例如,同时需要减少的计算功率量和/或减少的计算资源量,例如,如下文所述。
[0319]
在一些说明性方面中,雷达处理器834可以被配置成用于支持和/或实现多普勒算法,该多普勒算法可以被配置成用于确定针对距离-多普勒仓的多个多普勒折叠因子,例如,如下文所述。
[0320]
在一些说明性方面中,多个多普勒折叠因子可用于增强和/或改进速度估计算法,例如,如下文所述。
[0321]
在一些说明性方面中,多普勒算法可以被配置成用于利用雷达天线881的阵列拓扑,例如,根据天线阵列1000(图10)和/或天线阵列1100(图11a)的拓扑,例如,获得准确的速度估计,例如,利用减少的计算资源量。
[0322]
本文描述的一些说明性方面关于被配置用于雷达天线881、天线阵列1000(图10)和/或天线阵列1100(图11a)的阵列拓扑的多普勒算法。然而,多普勒算法可以被配置用于天线阵列的任何其他拓扑,例如,包括tx阵列和与tx阵列正交的rx阵列的天线阵列。
[0323]
在一个示例中,多普勒算法可以被配置用于天线阵列,该天线阵列可以具有tx阵列和rx阵列之间的解耦。例如,tx阵列可以是竖直的,并且rx阵列可以是水平的,反之亦然。
[0324]
在另一示例中,多普勒算法可以被配置用于天线阵列,该天线阵列可以使用时分多址(time division multiple access,tdma)mimo传输方案。
[0325]
在一些说明性方面中,多普勒算法可以被配置成用于例如基于多个度量的组合来确定准确的速度估计,该多个度量例如包括两个度量,其可与tx阵列的布置(例如,tx阵列的tx列)和/或rx阵列的布置(例如,rx行)相关联,例如,如下文所述。
[0326]
在一些说明性方面中,处理器836可以被配置成用于基于由雷达rx数据811表示的雷达rx信号来确定二维(2d)虚拟天线的虚拟雷达天线信息,例如,如下文所述。
[0327]
在一些说明性方面中,处理器836可以被配置成用于基于2d虚拟天线的第一维度中的多个一维(1d)虚拟阵列的虚拟雷达天线信息来从多个角度中检测一个或多个角度,例如,如下文所述。
[0328]
在一些说明性方面中,处理器836可以被配置成用于确定与一个或多个角度相对应的一个或多个多普勒折叠因子,例如,如下文所述。
[0329]
在一些说明性方面中,处理器836可以被配置成用于确定与一个或多个角度中的角度相对应的多普勒折叠因子,例如,如下文所述。
[0330]
在一些说明性方面中,处理器836可以被配置成用于确定与角度相对应的多个假设分数,例如,如下文所述。
[0331]
在一些说明性方面中,多个假设中的假设可以包括针对角度的假设的多普勒折叠因子,例如,如下文所述。
[0332]
在一些说明性方面中,针对假设的假设分数可以基于2d虚拟天线的第二维度中的1d虚拟阵列的虚拟雷达天线信息,例如,如下文所述。
[0333]
在一些说明性方面中,处理器836可以被配置成用于例如基于多个假设分数确定从与角度相对应的多个假设中所选择的假设,例如,如下文所述。
[0334]
在一些说明性方面中,处理器836可以被配置成用于例如基于所选择的假设确定与角度相对应的多普勒折叠因子,例如,如下文所述。
[0335]
在一些说明性方面中,雷达处理器836可被配置成用于例如基于一个或多个多普勒折叠因子确定雷达信息813,例如,如下文所述。
[0336]
在一些说明性方面中,2d虚拟天线的第一维度可以包括行维度,和/或2d虚拟天线的第二维度可以包括列维度,例如,如下文所述。
[0337]
在其他方面中,2d虚拟天线的第一维度可以包括列维度,和/或2d虚拟天线的第二维度可以包括行维度。
[0338]
在一些说明性方面中,处理器836可以被配置成用于例如基于2d虚拟天线的第一维度中的多个1d虚拟阵列确定包括与多个角度相对应的多个能量值的能量向量,例如,如下文所述。
[0339]
在一些说明性方面中,处理器836可以被配置成用于例如基于与多个能量值相对应的能量标准从多个角度中检测一个或多个角度,例如,如下文所述。
[0340]
在一些说明性方面中,处理器836可以被配置成用于例如基于一个或多个度量确定包括针对角度的假设的多普勒折叠因子的假设的假设分数,例如,如下文所述。
[0341]
在一些说明性方面中,处理器836可以被配置成用于例如基于针对角度的假设的多普勒折叠因子和2d虚拟天线的第二维度中的1d虚拟阵列的虚拟雷达天线信息来确定能谱,例如,如下文所述。
[0342]
在一些说明性方面中,处理器836可以被配置成用于例如基于能谱的峰值平均分数(peak-to-average score)和/或能谱的均方根(root mean square,rms)带宽分数)确定与假设相对应的假设分数,例如,如下文所述。
[0343]
在其他方面中,处理器836可以被配置成用于例如基于任何其他附加或替代度量(例如,不同于峰值平均分数和/或rms带宽分数)来确定与假设相对应的假设分数。
[0344]
在一些说明性方面中,多普勒算法可以包括、可以利用和/或可以基于三个过程、时期、阶段和/或方法中的一些或全部,这三个过程、时期、阶段和/或方法例如,对传输顺序的选择、对一个或多个角度的检测和/或对与一个或多个角度相对应的多普勒折叠因子的选择,例如,如下文所述。
[0345]
在其他方面中,多普勒算法可以基于任何其他附加和/或替代的过程、方法和/或阶段。
[0346]
参考图13,图13示意性地图示出根据一些说明性方面的确定用于经由雷达天线传输雷达信号的传输顺序的方法。
[0347]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于实现图13的方法的一个或多个操作,以确定经由雷达天线(例如,雷达天线881(图8)、天线阵列1000(图10)或天线阵列1100(图11a))发射tx雷达信号的传输顺序。
[0348]
在一些说明性方面中,如框1302处所示,方法可以包括:例如基于天线阵列的阵列构型1306和/或经由天线阵列传输的雷达信号的一个或多个参数1305生成发射序列1304。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于雷达rx信号和/或雷达天线881(图8)、天线阵列1000(图10)或天线阵列1100(图11a)的阵列构型生成发射序列1304。
[0349]
在一个示例中,例如,由于在发射机之间的时间间隔期间的对象移动,对错误的多普勒折叠因子的选择可转换为残余相位。根据该示例,为了使用可分离方法,tx阵列的同一行上的发射机之间的时间延迟可以被最小化。
[0350]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于选择传输顺序,例如,当错误的多普勒折叠因子被选择时,该传输顺序可降低空间处理增益,例如,以检测正确的多普勒折叠因子。
[0351]
在一个示例中,例如当可以与构型顺序相同的传输顺序可被选择时,残余相位例如在空间域中可以变为线性的,其对应于错误的方向。
[0352]
参考图14,图14示意性地图示出根据一些说明性方面的基于虚拟雷达天线信息从多个角度中检测一个或多个角度的方法。
[0353]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于实现图14的方法的一个或多个操作,以基于2d虚拟天线的虚拟雷达天线信息从多个角度中检测一个或多个角度,该2d虚拟天线基于雷达天线881(图8)、天线阵列1000(图10)或天线阵列1100(图11a)。
[0354]
在一些说明性方面中,如框1402处所示,方法可以包括:例如基于雷达数据1401和/或雷达天线的一个或多个参数1403确定2d虚拟天线的虚拟雷达天线信息1404。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于例如由雷达rx数据811表示的雷达rx信号和/或雷达天线881(图8)、天线阵列1000(图10)和/或天线阵列1100(图11a)的一个或多个参数)确定虚拟雷达天线信息1404。
[0355]
在一些说明性方面中,如框1408处所示,方法可以包括对虚拟雷达天线信息1404的水平处理,例如,以生成水平数据1410。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于虚拟雷达天线信息1404生成水平数据1410。
[0356]
在一些说明性方面中,水平数据1410可以包括多个角度,例如,与多个1d虚拟阵列(例如,2d虚拟天线的多个行)相对应的方位角。例如,水平数据1410可以包括能量向量,该能量向量包括与多个角度相对应的多个能量值。
[0357]
在一些说明性方面中,如框1412处所示,方法可以包括:例如基于水平数据1410、例如以角度的“活跃列表”的形式从多个角度中检测一个或多个角度1414。例如,雷达处理
器834(图8)和/或处理器836(图8)可以被配置成用于例如基于将应用于水平数据1410的能量标准来检测能量向量中的一个或多个角度。
[0358]
在一些说明性方面中,框1408处的水平处理可以包括水平空间变换,例如,使用fft或任何其他方法例如来检测可能潜在地是目标的具有高能量水平的区域。
[0359]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以例如基于与rx阵列相对应的多个1d阵列执行水平空间变换。例如,rx阵列可能不会遭受多普勒模糊,例如,因为可以同时接收所有rx信道。
[0360]
在一些说明性方面中,框1408处的水平处理可以包括对水平数据1410的非相干求和,例如,以例如在水平空间变换之后改善snr和/或允许更高的检测概率。
[0361]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于检测(框1412)能量向量中的一个或多个角度,该一个或多个角度可以是非相干求和的结果。
[0362]
参考图15,图15示意性地图示出根据一些说明性方面的确定一个或多个多普勒折叠因子的方法。
[0363]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于实现图15的方法的一个或多个操作,以确定一个或多个多普勒折叠因子。
[0364]
在一些说明性方面中,如框1502处所示,方法可以包括移除多个假设1530的残余相位,多个假设1530可以为一个或多个所检测的角度1501(例如,包括一个或多个角度1414的活跃列表(图14))中的所检测的角度考虑。
[0365]
在一些说明性方面中,如框1502处所示,移除针对多个假设1530的残余相位可以基于天线射线的虚拟雷达天线信息的水平数据1503,例如,水平数据1410(图14)。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于移除针对(例如,为所检测角度考虑的)多个假设1530的残余相位。
[0366]
在一些说明性方面中,可以在虚拟雷达天线信息1404(图14)的一个或多个列中(例如,在每一列中)执行对针对多个假设1530的残余相位的移除。
[0367]
在一个示例中,可以假设残余相位是由目标的移动引起的。
[0368]
在一些说明性方面中,如框1504处所示,方法可以包括例如在从虚拟雷达天线信息1404(图14)中移除残余相位之后对虚拟雷达天线信息1404(图14)的竖直处理。
[0369]
在一些说明性方面中,竖直处理可以被配置成用于例如基于多个假设1530生成多个能谱1505。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于为所检测角度考虑的多个假设1530生成多个能谱1505。
[0370]
在一个示例中,竖直处理可以包括竖直空间变换,例如,fft或任何其他方法。
[0371]
在一些说明性方面中,如框1506处所示,方法可以包括确定针对与角度相对应的多个假设1530的多个假设分数1507。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于多个能谱1505确定多个假设分数1507。
[0372]
在一些说明性方面中,可以使用多个假设分数1507来分析能谱1505,例如,作为竖直处理的空间变换的结果,假设分数1507可以描述能量的集中,例如,类似于焦点评分等。
[0373]
在一些说明性方面中,如框1508处所示,方法可以包括从针对所检测角度的多个假设分数1507中确定所选择的假设分数1509。例如,雷达处理器834(图8)和/或处理器836
(图8)可以被配置成用于例如基于多个假设分数1507确定所选择的假设分数1509。
[0374]
在一些说明性方面中,方法可以包括:例如基于所选择的假设分数1509确定与一个或多个所检测角度1501中的所检测角度相对应的多普勒折叠因子。
[0375]
在一些说明性方面中,方法可以包括:例如基于与一个或多个所检测角度1501相对应的一个或多个所选择的假设分数1509确定与一个或多个所检测角度1501相对应的一个或多个多普勒折叠因子1510。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于一个或多个所选择的假设分数1509确定一个或多个多普勒折叠因子。
[0376]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于从雷达多普勒信息(例如,虚拟雷达天线信息1404(图14))中移除与一个或多个多普勒折叠因子1510相对应的残余相位,例如,这可以在进一步的阶段中增强和/或改进雷达多普勒信息的多普勒处理。
[0377]
在一些说明性方面中,图15的方法可应用于可通过图14的方法检测的虚拟雷达天线信息1404(图14)的每一列。
[0378]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于度量的组合(例如,可以描述一个或多个频谱特性的两个或更多个度量)确定多普勒折叠因子,例如多普勒折叠因子1510。例如,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于例如基于峰值平均度量和/或rms带宽度量确定所选择的假设分数1509,例如,如下文所述。
[0379]
在一些说明性方面中,峰值平均分数可以在对数空间中,和/或rms带宽可以在线性空间中。
[0380]
在一些说明性方面中,可以定义峰值平均分数,例如,如下所示:其中p表示功率,n表示能量样本的计数,并且p(n)表示与第n个样本相对应的功率。
[0381]
在一些说明性方面中,rms带宽分数可以例如定义为例如基于对象的质心的、对仰角rms带宽的近似值,例如,如下所示:角rms带宽的近似值,例如,如下所示:
[0382]
在一些说明性方面中,峰值平均分数和/或rms带宽分数可以归一化,例如,以包括0与1之间的范围内的值。
[0383]
在一些说明性方面中,例如当所检测的目标的能量集中到小区域内时,峰值平均分数可以在错误的多普勒折叠因子和正确的多普勒折叠因子之间提供相对准确的区分。
[0384]
在一些说明性方面中,例如当目标被分布时,rms带宽分数可以在错误的多普勒折叠因子和正确的多普勒折叠因子之间提供相对准确的区分。
[0385]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于选择两个度量的最高分数。基于峰值平均分数和rms带宽分数两者对假设的选择可以提供更好的结果,例如,与仅基于度量中的一个度量的选择相比,例如,可以提供(例如,因子为10的)显著更好的结果。
[0386]
参考图16,图16示意性地图示出根据一些说明性方面的描绘与对应于角度的假设的相应多个假设分数相对应的多个能谱的图表。
[0387]
在一个示例中,能谱可以与snr为17分贝(db)的单个目标相对应。
[0388]
在一些说明性方面中,如图16中所示,图表1610描绘了与正确假设的rms带宽分数相对应的能谱。
[0389]
在一些说明性方面中,如图16中所示,正确假设的rms带宽分数可以是0.36719。
[0390]
在一些说明性方面中,如图16中所示,图表1620描绘了与正确假设的峰值平均分数相对应的能谱。
[0391]
在一些说明性方面中,如图16中所示,正确假设的峰值平均分数可以是0.9088。
[0392]
在一些说明性方面中,如图16中所示,图表1630描绘了与错误假设的rms带宽分数相对应的能谱。
[0393]
在一些说明性方面中,如图16中所示,错误假设的rms带宽分数可以是0.33465。
[0394]
在一些说明性方面中,如图16中所示,图表1640描绘了与错误假设的峰值平均分数相对应的能谱。
[0395]
在一些说明性方面中,如图16中所示,错误假设的峰值平均分数可以是0.45415。
[0396]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于选择与两个度量的最高分数相对应的假设,该最高分数例如,表示正确假设的峰值平均分数0.9088。
[0397]
在一些说明性方面中,如图16中所示,rms带宽分数可能无法区分正确假设和错误假设,例如,因为rms带宽分数几乎相同。然而,峰值平均分数可以提供对正确假设的清楚指示。
[0398]
参考图17,图17示意性地图示出根据一些说明性方面的描绘与对应于角度的假设的相应多个假设分数相对应的多个能谱的图表。
[0399]
在一个示例中,能谱可以与snr为17的单个目标相对应。
[0400]
在一些说明性方面中,如图17中所示,图表1710描绘了与正确假设的rms带宽分数相对应的能谱。
[0401]
在一些说明性方面中,如图17中所示,正确假设的rms带宽分数可以是0.54193。
[0402]
在一些说明性方面中,如图17中所示,图表1720描绘了与正确假设的峰值平均分数相对应的能谱。
[0403]
在一些说明性方面中,如图17中所示,正确假设的峰值平均分数可以是0.36477。
[0404]
在一些说明性方面中,如图17中所示,图表1730描绘了与错误假设的rms带宽分数相对应的能谱。
[0405]
在一些说明性方面中,如图17中所示,错误假设的rms带宽分数可以是0。
[0406]
在一些说明性方面中,如图17中所示,图表1740描绘了与错误假设的峰值平均分数相对应的能谱。
[0407]
在一些说明性方面中,如图17中所示,错误假设的峰值平均分数可以是0.38401。
[0408]
在一些说明性方面中,雷达处理器834(图8)和/或处理器836(图8)可以被配置成用于选择与两个度量的最高分数相对应的假设,该最高分数例如,表示正确假设的rms带宽分数0.54193。
[0409]
在一些说明性方面中,如图17中所示,峰值平均分数可指示错误假设,例如,因为根据峰值平均度量,错误假设可具有更高的分数。然而,rms带宽分数可提供对正确假设的清楚指示,例如,与错误假设的rms带宽分数0相比,正确假设的rms带宽分数为0.54193。
[0410]
在一些说明性方面中,例如,当使用不包括例如在天线阵列1000(图10)和/或天线阵列1100(图11a)中的1d阵列的tx阵列时,可以确定主方向。
[0411]
在一个示例中,可以使用具有2列的16个tx天线元件的tx阵列。根据该示例,经由同一行的两个tx天线元件的传输可以是连续的。根据该设置,可以将tx阵列处理为具有双倍rx信道的1d阵列中的16个tx天线元件的阵列。
[0412]
在一些说明性方面中,例如,由于目标的移动,该实现可导致小的相位跳变和/或差异。然而,例如,在框1408(图14)处的水平处理中,相位跳变和/或差异可以被忽略,例如,如下文所述。
[0413]
在一些说明性方面中,例如,当天线阵列的tx阵列未配置为1d阵列时,rx变换可遭受相位差(相位跳变),表示为phasediff(相位差)。
[0414]
在一些说明性方面中,例如当方向落在一个被测试的假设上时,例如假设没有跨越损失,相位差phasediff可以例如基于目标的最大速度被约束,例如,如下所示:
[0415]
在一个示例中,假设最大目标速度为50m/s,pri为2.4微秒(us),和/或雷达设备频率为79ghz,则相位差phasediff可以小于或等于0.4,例如,如下所示:
[0416]
在一些说明性方面中,可以例如基于具有不同相位的两个向量之和与完全相干求和之间的比较来确定增益损失(表示为loss(损失)),例如,如下所示:
[0417]
在一些说明性方面中,例如当目标不处于被测试的假设时,相位差phasediff可以表示天线阵列的两个子阵列(例如,子阵列1022和1028(图10))之间的相位差。
[0418]
在一些说明性方面中,可以执行模拟,例如,以确定相位差对确定的多普勒折叠因子的准确度的影响。
[0419]
在一些说明性方面中,模拟的结果可基于与被测试的假设的方向的距离。
[0420]
参考图18,图18示意性地图示了根据一些说明性方面的基于snr损失的相位差phasediff的直方图1800。
[0421]
在一些说明性方面中,直方图1800描绘了针对目标速度为50米/秒(m/s)的相位跳变影响的模拟结果。
[0422]
在一些说明性方面中,如图18中所示,可存在由相位差相phasediff导致的高达1.5db的snr损失,例如,snr损失增加或减少高达1.5db。
[0423]
在一些说明性方面中,如图18中所示,平均而言,snr损失可具有可忽略的影响。
[0424]
参考图19,图19示意性地图示出根据一些说明性方面的处理雷达信息的方法。例如,图19的方法的一个或多个操作可以由系统的一个或多个元件来执行,这一个或多个元件例如,交通工具(例如,交通工具100(图1))、雷达设备(例如,雷达设备101(图1))、控制器(例如,控制器1050(图10))和/或处理器(例如,雷达处理器834(图8)和/或处理器836(图8))来执行。
[0425]
如框1902处所示,方法可以包括基于雷达rx信号来确定2d虚拟天线的虚拟雷达天线信息。例如,雷达处理器834(图8)可以被配置成用于基于由雷达rx数据811(图8)表示的雷达rx信号来确定2d虚拟天线的虚拟雷达天线信息,例如,如上所述。
[0426]
如框1904处所示,方法可以包括:例如基于2d虚拟天线的第一维度中的多个1d虚拟阵列的虚拟雷达天线信息从多个角度中检测一个或多个角度。例如,雷达处理器834(图8)可以被配置成例如基于2d虚拟天线的第一维度中的多个1d虚拟阵列的虚拟雷达天线信息从多个角度中检测一个或多个角度,例如,如上所述。
[0427]
如框1906处所示,方法可以包括确定与该一个或多个角度相对应的一个或多个多普勒折叠因子。例如,雷达处理器834(图8)可以被配置成用于确定与该一个或多个角度相对应的一个或多个多普勒折叠因子,例如,如上所述。
[0428]
如框1908处所示,确定一个或多个多普勒折叠因子可以包括确定针对与该一个或多个角度中的角度对应的多个假设的多个假设分数,该多个假设中的假设包括针对该角度的假设的多普勒折叠因子,其中针对该假设的假设分数可以基于2d虚拟天线的第二维度中的1d虚拟阵列的虚拟雷达天线信息。例如,雷达处理器834(图8)可以被配置成用于确定针对与该一个或多个角度中的角度相对应的多个假设的多个假设分数,例如,如上所述。
[0429]
如框1910处所示,确定一个或多个多普勒折叠因子可以包括:例如基于多个假设分数从与角度相对应的多个假设中确定所选择的假设。例如,雷达处理器834(图8)可以被配置成用于例如基于该多个假设分数从与该角度相对应的多个假设中确定所选择的假设,例如,如上所述。
[0430]
如框1912处所示,确定一个或多个多普勒折叠因子可以包括基于所选择的假设来确定与角度相对应的多普勒折叠因子。例如,雷达处理器834(图8)可以被配置成用于例如基于所选择的假设确定与角度相对应的多普勒折叠因子,例如,如上所述。
[0431]
如框1914处所示,方法可以包括基于一个或多个多普勒折叠因子来确定雷达信息。例如,雷达处理器834(图8)可被配置成用于基于一个或多个多普勒折叠因子来确定雷达信息813(图8),例如,如上所述。
[0432]
参考图20,图20示意性地图示出根据一些说明性方面的制造的产品2000。产品
2000可以包括一个或多个有形的计算机可读(“机器可读”)非暂态存储介质2002,该存储介质2002可以包括(例如,由逻辑2004实现的)计算机可执行指令。当(例如,由逻辑2004实现的)该计算机可执行指令由至少一个计算机处理器执行时,可操作用于使至少一个计算机处理器能够实现在交通工具(例如,交通工具100(图1))、雷达设备(例如,雷达设备101(图1))、控制器(例如,控制器1050(图10))和/或处理器(例如,雷达处理器834(图8)和/或处理器836(图8))处的一个或多个操作;使得交通工具(例如,交通工具100(图1))、雷达设备(例如,雷达设备101(图1))、控制器(例如,控制器1050(图10))和/或处理器(例如,雷达处理器834(图8)和/或处理器836(图8))执行、触发和/或实现一个或多个操作和/或功能;和/或执行、触发和/或实现参照图1-图19中的一者或多者所述的一个或多个操作和/或功能,和/或本文所述的一个或多个操作。短语“非暂态机器可读介质”和“计算机可读非暂态存储介质”可针对包括所有机器和/或计算机可读介质,唯一的例外是暂态传播信号。
[0433]
在一些说明性方面中,产品2000和/或存储介质2002可以包括能够存储数据的一种或多种类型的计算机可读存储介质,包括易失性存储器、非易失性存储器、可移除存储器或不可移除存储器、可擦除存储器或不可擦除存储器、可写入存储器或可重写存储器等等。例如,存储介质2002可以包括ram、dram、双倍数据速率dram(double-data-rate dram,ddr-dram)、sdram、静态ram(static ram,sram)、rom、可编程rom(programmable rom,prom)、可擦除可编程rom(erasable programmable rom,eprom)、电可擦除可编程rom(electrically erasable programmable rom,eeprom)、致密盘rom(compact disk rom,cd-rom)、可记录致密盘(compact disk recordable,cd-r)、可重写致密盘(compact disk reriteable,cd-rw)、闪存存储器(例如,nor或nand闪存存储器)、内容可寻址存储器(content addressable memory,cam)、聚合物存储器、相变存储器、铁电存储器、硅-氧化物-氮化物-氧化物-硅(silicon-oxide-nitride-oxide-silicon,sonos)存储器、磁盘、软盘、硬盘、光盘、磁盘、卡、磁卡、光卡、磁带、磁带盒等等。计算机可读存储介质可以包括涉及通过通信链路(例如,调制解调器、无线电或网络连接),将通过由在载波或其他传播介质中具体化的数据信号承载的计算机程序从远程计算机下载或传输至请求计算机的任何合适的介质。
[0434]
在一些说明性方面中,逻辑2004可以包括指令、数据和/或代码,如果所述指令、数据和/或代码由机器执行,则可以使得机器执行本文所述的方法、过程和/或操作。机器可包括例如任何合适的处理平台、计算平台、计算设备、处理设备、计算系统、处理系统、计算机、处理器等等,并且可使用硬件、软件、固件等的任何合适的组合来实现。
[0435]
在一些说明性方面中,逻辑2004可以包括或可以实现为软件、软件模块、应用、程序、子例程、指令、指令集、计算代码、字、值、符号等。指令可包括任何合适类型的代码,诸如,源代码、经编译的代码、经解释的代码、可执行代码、静态代码、动态代码等等。指令可以根据预定义的计算机语言、方式、或语法来实现,以便指示处理器来执行某一功能。指令可以使用任何合适的高级、低级、面向对象的、可视化的、编译的和/或解释的编程语言来实现,这些编程语言诸如,c、c++、java、basic、matlab、pascal、visual basic、汇编语言、机器代码等。示例
[0436]
以下示例涉及进一步的各个方面。
[0437]
示例1包括一种装置,该装置包括雷达天线,该雷达天线包括:发射(tx)天线阵列,
该发射(tx)天线阵列被配置成用于发射多个tx雷达信号;以及接收(rx)天线阵列,该接收(rx)天线阵列被配置成用于基于该多个tx雷达信号来接收多个rx雷达信号,该rx天线阵列正交于该tx天线阵列,其中tx天线阵列或rx天线阵列的第一阵列包括第一子阵列和平行于第一子阵列的第二子阵列,其中第一子阵列和第二子阵列之间的子阵列间距短于tx天线阵列或rx天线阵列的第二阵列的长度。
[0438]
示例2包括示例1的主题,并且任选地,其中第一子阵列或第二子阵列中的至少一个子阵列包括多个一维(1d)阵列的交错布置,多个1d阵列包括第一1d阵列以及第二1d阵列,第一1d阵列包括第一多个天线元件,第二1d阵列包括相对于第一多个天线元件交错的第二多个天线元件。
[0439]
示例3包括示例2的主题,并且任选地,其中第一1d阵列的开始和第二1d阵列的开始之间的1d阵列间距短于第一1d阵列的天线元件的长度,其中1d阵列间距和天线元件的长度沿平行于第一1d阵列的轴线定义。
[0440]
示例4包括示例2或3的主题,并且任选地,其中第一1d阵列的开始和第二1d阵列的开始之间的1d阵列间距是第一1d阵列的天线元件的长度的一半,其中1d阵列间距和天线元件的长度沿平行于第一1d阵列的轴线定义。
[0441]
示例5包括示例2-4中任一项的主题,并且任选地,其中第一1d阵列的天线元件的长度等于多个tx雷达信号的波长,并且其中第一1d阵列的开始和第二1d阵列的开始之间的1d阵列间距等于多个tx雷达信号的波长的一半,其中1d阵列间距和天线元件的长度沿平行于第一1d阵列的轴线定义。
[0442]
示例6包括示例2-5中任一项的主题,并且任选地,其中第一1d阵列的天线元件的宽度等于第二阵列的天线元件的长度,其中第一1d阵列的天线元件的宽度和第二阵列的天线元件的长度沿平行于第二阵列的轴线定义。
[0443]
示例7包括示例2-6中任一项的主题,并且任选地,其中第一1d阵列的天线元件的宽度等于多个tx雷达信号的波长的一半,并且其中第二阵列的天线元件的长度等于多个tx雷达信号的波长的一半,其中第一1d阵列的天线元件的宽度和第二阵列的天线元件的长度沿平行于第二阵列的轴线定义。
[0444]
示例8包括示例2-7中任一项的主题,并且任选地,其中第二阵列包括第三多个天线元件,其中多个1d阵列的中心与第二阵列的第三多个天线元件中的相应天线元件的中心对齐。
[0445]
示例9包括示例2-8中任一项的主题,并且任选地,其中第一1d阵列的第一天线元件的中心和第一1d阵列的、与第一天线元件相邻的第二天线元件的中心之间的距离不大于多个tx雷达信号的波长。
[0446]
示例10包括示例1-9中任一项的主题,并且任选地,其中第一子阵列的天线元件和第二阵列的第一天线元件之间的第一距离等于第二子阵列的天线元件和第二阵列的第二天线元件之间的第二距离,其中第二阵列的第一天线元件在第二子阵列的天线元件上方,并且第二阵列的第二天线元件在第一子阵列的天线元件上方。
[0447]
示例11包括示例1-10中任一项的主题,并且任选地,其中第二阵列包括1d阵列,该1d阵列包括沿平行于第二阵列的轴线具有相同长度的多个天线元件。
[0448]
示例12包括示例1-11中任一项的主题,并且任选地,其中第二阵列的天线元件沿
平行于第二阵列的轴线的长度等于多个tx雷达信号的波长的一半。
[0449]
示例13包括示例1-12中任一项的主题,并且任选地,其中第二阵列的第一天线元件的中心和第二阵列的、与第一天线元件相邻的第二天线元件的中心之间的距离等于多个tx雷达信号的波长的一半。
[0450]
示例14包括示例1-13中任一项的主题,并且任选地,其中第一子阵列包括第一多个1d阵列,并且第二子阵列包括第二多个1d阵列。
[0451]
示例15包括示例1-14中任一项的主题,并且任选地,其中第一子阵列与第二子阵列相同。
[0452]
示例16包括示例1-15中任一项的主题,并且任选地,其中第一阵列包括tx天线阵列,并且第二阵列包括rx天线阵列。
[0453]
示例17包括示例1-15中任一项的主题,并且任选地,其中第一阵列包括rx天线阵列,并且第二阵列包括tx天线阵列。
[0454]
示例18包括示例1-17中任一项的主题,并且任选地,包括控制器,该控制器被配置成用于控制雷达天线发射多个tx雷达信号。
[0455]
示例19包括示例18的主题,并且任选地,其中控制器被配置成用于控制tx天线阵列发射tx雷达信号序列,该tx雷达信号序列包括经由第一子阵列的第一天线元件的第一tx雷达信号、以及经由第二子阵列的第二天线元件的第二tx雷达信号,第二tx雷达信号在tx雷达信号序列中与第一tx雷达信号是连续的。
[0456]
示例20包括示例19的主题,并且任选地,其中tx雷达信号序列包括经由第一子阵列的第三天线元件的第三tx雷达信号、以及经由第二子阵列的第四天线元件的第四tx雷达信号,第四tx雷达信号在tx雷达信号序列中与第三tx雷达信号是连续的。
[0457]
示例21包括示例18-20中任一项的主题,并且任选地,其中控制器被配置成用于控制tx天线阵列发射多个tx雷达信号对,tx雷达信号对包括经由第一子阵列的第一天线元件的第一tx雷达信号、以及经由第二子阵列的第二天线元件的第二tx雷达信号。
[0458]
示例22包括示例21的主题,并且任选地,其中第一天线元件相对于第一子阵列的中心的相对位置与第二天线元件相对于第二子阵列的中心的相对位置相同。
[0459]
示例23包括示例18-22中任一项的主题,并且任选地,其中控制器被配置成用于控制tx天线阵列经由第一子阵列的第一天线元件发射第一tx雷达信号,并经由第二子阵列的第二天线元件发射第二tx雷达信号;通过基于第一tx雷达信号将第一权重应用于第一rx雷达信号的相位来确定第一加权相位;通过基于第二tx雷达信号将第二权重应用于第二rx雷达信号的相位来确定第二加权相位;以及基于第一加权相位和第二加权相位确定第一雷达rx信号的第一相位和第二雷达rx信号的第二相位之间的相位重叠。
[0460]
示例24包括示例1-23中任一项的主题,并且任选地,包括处理器,该处理器被配置成用于基于多个rx雷达信号来生成雷达信息。
[0461]
示例25包括示例24的主题,并且任选地,其中处理器被配置成用于:基于雷达rx信号来确定二维(2d)虚拟天线的虚拟雷达天线信息;基于2d虚拟天线的第一维度中的多个一维(1d)虚拟阵列的虚拟雷达天线信息,从多个角度中检测一个或多个角度;确定与一个或多个角度相对应的一个或多个多普勒折叠因子,其中确定与一个或多个角度中的角度相对应的多普勒折叠因子包括:确定针对与该角度相对应的多个假设的多个假设分数,多个假
设中的假设包括针对该角度的假设的多普勒折叠因子,针对该假设的假设分数基于2d虚拟天线的第二维度中的1d虚拟阵列的虚拟雷达天线信息;基于多个假设分数从与角度对应的多个假设中确定所选择的假设;以及基于所选择的假设来确定与该角度相对应的多普勒折叠因子;以及基于该一个或多个多普勒折叠因子来确定雷达信息。
[0462]
示例26包括示例25的主题,并且任选地,其中处理器被配置成用于基于2d虚拟天线的第一维度中的多个1d虚拟阵列来确定包括与多个角度相对应的多个能量值的能量向量;以及基于与多个能量值相对应的能量标准从多个角度中检测一个或多个角度。
[0463]
示例27包括示例25或26的主题,并且任选地,其中处理器被配置成用于通过以下方式来确定针对包括针对该角度的假设的多普勒折叠因子的假设的假设分数:基于针对该角度的假设的多普勒折叠因子和2d虚拟天线的第二维度中的1d虚拟阵列的虚拟雷达天线信息来确定能谱;以及基于能谱的峰值平均分数和能谱的均方根(rms)带宽分数来确定与该假设相对应的假设分数。
[0464]
示例28包括示例24-27中任一项的主题,并且任选地,包括交通工具,该交通工具包括用于基于雷达信息来控制交通工具的一个或多个系统的系统控制器。
[0465]
示例29包括一种设备,该设备包括用于执行示例1-28中的一项或多项所述的操作中的任一项的装置。
[0466]
示例30包括一种存储指令的机器可读介质,该指令用于由处理器执行以执行示例1-28中的一项或多项所述的操作中的任一项。
[0467]
示例31包括一种装置,该装置包括存储器;以及处理电路,该处理电路被配置成用于执行示例1-28中的一项或多项所述的操作中的任一项。
[0468]
示例32包括一种方法,该方法包括示例1-28中的一项或多项所述的操作中的任一项。
[0469]
本文中参考一个或多个方面来描述的功能、操作、部件和/或特征可与本文中参考一个或多个其他方面来描述的一个或多个其他功能、操作、部件和/或特征组合或可与其组合地被利用,或者反之亦然。
[0470]
虽然本文中已经图示和描述了某些特征,但是本领域技术人员可想到许多修改、替换、改变、以及等效方案。因此,应理解,所附权利要求旨在覆盖如落在本公开的真实精神内的所有此类修改和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1