一种多轴一体伺服动态制动电路的制作方法
本技术涉及伺服控制,尤其是涉及一种多轴一体伺服动态制动电路。
背景技术:
1、伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置,伺服系统通过伺服驱动器控制伺服电机。伺服驱动电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。目前主流的伺服驱动器均采用数字信号处理器(dsp)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化,伺服驱动器的功率驱动级普遍采用以高压igbt为核心的功率集成模块(pim)和智能功率模块(ipm)的技术。
2、相关技术中,伺服驱动器根据轴数可分为单轴伺服与多轴伺服,多轴伺服可以理解为伺服驱动器可以同时控制多个电机运行。当单轴伺服驱动电机高速运行时,如果遇到伺服驱动器出现异常需要停机,一般有三种停机方式。第一、使用有抱闸功能的电机,该方式能让伺服电机立即停住,缺点是抱闸电机成本高。第二、使用动态制动电路,该方式能让电机快速停止,需要伺服驱动器设计该电路。第三、让电机自由停止,然而这种情况下电机自由停止距离较长,极易有损坏机械结构及伤人的风险。基于以上停机情况,现有的单轴伺服一般要内置动态制动电路,当伺服系统出现异常需要停机时,动态制动电路使得单轴伺服驱动电机停机。
3、然而,当将动态制动电路应用于多轴伺服时,需要根据多轴伺服的轴数配备同等数量的功率电阻,电路板所需的结构空间较大。
技术实现思路
1、为了改善相关的当将动态制动电路应用于多轴伺服时,需要根据多轴伺服的轴数配备同等数量的功率电阻,电路板所需的结构空间较大的弊端,本技术提供一种多轴一体伺服动态制动电路。
2、本技术提供的一种多轴一体伺服动态制动电路采取如下的技术方案:
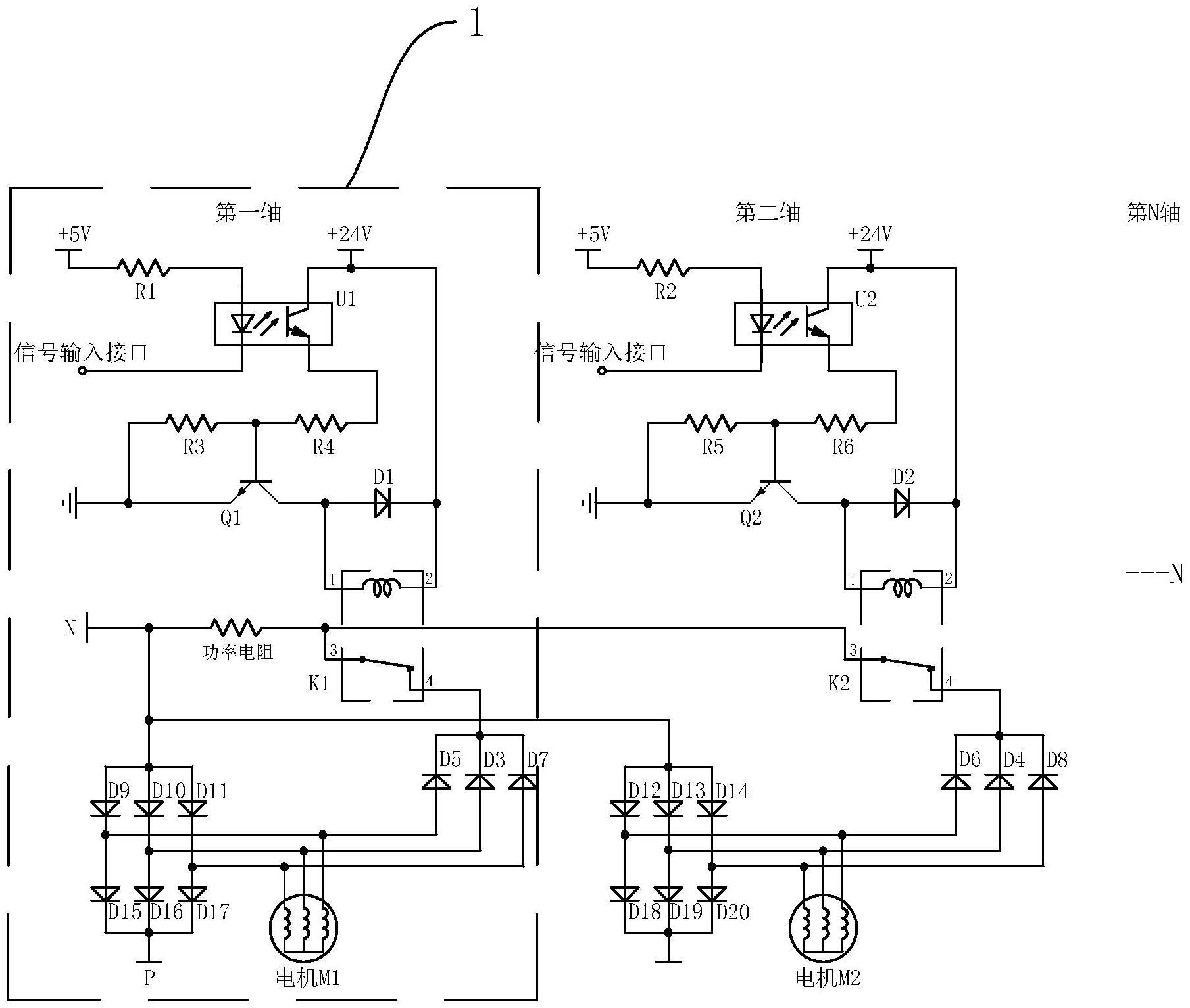
3、一种多轴一体伺服动态制动电路,包括功率电阻,所述功率电阻的输入端电性连接于高压电源,所述功率电阻的输出端电性连接有若干条动态制动支路,若干条动态制动支路相互并联,所述功率电阻的两端分别电性连接于所述动态制动支路的输入端与输出端。
4、通过采用上述技术方案,当伺服驱动器出现异常需要停机时,通过功率电阻的设置,若干条动态制动电路与功率电阻相互串联,使得多轴伺服共用同一个功率电阻,使得伺服驱动器出现异常时,功率电阻消耗掉电机的机械能,从而使得电机停机,有效地减少了当将动态制动电路应用于多轴伺服时,需要根据多轴伺服的轴数配备同等数量的功率电阻,电路板所需的结构空间较大的情况。
5、优选的,所述动态制动支路包括用于驱动电机工作且当多轴伺服发生异常时驱动电机停机的ipm驱动单元以及用于控制ipm驱动单元与所述功率电阻之间的连接的启闭单元,所述ipm驱动单元与所述启闭单元之间电性连接有继电器,所述ipm驱动单元的输入端电性连接于高压电源,所述ipm驱动单元的输出端电性连接于所述功率电阻,所述启闭单元的输入端电性连接于低压电源,所述启闭单元的输出端电性连接于所述继电器。
6、通过采用上述技术方案,当伺服驱动器出现异常需要停机时,伺服系统首先关闭ipm输出的高压,通过启闭单元的设置,使得继电器k1不得电,继电器k1的1脚和2脚线圈无励磁,3脚和4脚处于闭合状态,动态制动电路有效,此时电机m1充当发电机。ipm驱动单元与功率电阻之间相互连接,使得功率电阻消耗掉电机m1的机械能,从而使得电机m1停机。
7、优选的,所述启闭单元包括信号输入接口、与信号输入接口电性连接的光耦以及电性连接于光耦的开关部,所述光耦的阴极端电性连接于所述信号输入接口,所述光耦的阳极端电性连接于低压电源,所述光耦的集电极均电性连接于低压电源与所述继电器之间,所述光耦的发射极电性连接于所述开关部的输入端,所述开关部的输出端电性连接于所述继电器。
8、通过采用上述技术方案,当伺服驱动器出现异常需要停机时,伺服系统首先关闭ipm输出的高压,此时信号输入接口输入的mcu控制信号为高电平,光耦u1截止,使得开关部断开,从而使得继电器k1不得电。
9、优选的,所述开关部包括三极管,所述三极管的基极电性连接于所述光耦的发射极,所述三极管的集电极电性连接于所述继电器,所述三极管的发射极接地。
10、通过采用上述技术方案,当伺服驱动器正常驱动电机时,信号输入接口输入mcu控制信号,此时mcu控制信号为低电平,光耦u1导通。三极管q1的基极电压大于三极管q1的发射极电压,三极管q1处于饱和导通状态,继电器k1得电工作,继电器k1的1和2脚线圈励磁,3和4脚处于断开状态,动态制动电路无效,此时由从ipm驱动单元输出的高压直接驱动电机m1运行。
11、优选的,所述光耦的发射极电性连接有电阻r3与电阻r4,所述电阻r3与所述r4相互串联,且所述三极管的基极电性连接于所述电阻r3与所述电阻r4。
12、通过采用上述技术方案,当伺服驱动器正常驱动电机时,信号输入接口输入mcu控制信号,此时mcu控制信号为低电平,光耦u1导通,电阻r3与电阻r4的分压,使得三极管q1的基极电压大于三极管q1的发射极电压,从而使得三极管q1导通,继电器k1得电工作,继电器k1的1和2脚线圈励磁,3和4脚处于断开状态,动态制动电路无效,此时由从ipm驱动单元输出的高压直接驱动电机m1运行。
13、优选的,所述ipm驱动单元包括ipm内部电路以及用于将电机输出的电能进行整流后输出的整流部,所述ipm内部电路的两端分别电性连接于高压电源,电机电性连接于所述ipm内部电路与所述整流部之间,所述整流部的输入端电性连接于所述ipm内部电路,所述整流部的输出端电性连接于所述继电器。
14、通过采用上述技术方案,当伺服驱动器出现异常需要停机时,伺服系统首先关闭ipm输出的高压,此时信号输入接口输入的mcu控制信号为高电平,光耦u1截止,三极管q1同样处于截止状态,继电器k1不得电,使得继电器k1的1脚和2脚线圈无励磁,3脚和4脚处于闭合状态,动态制动电路有效,此时电机m1充当发电机,通过ipm内部电路以及整流部将电机m1输出的交流电整流成直流电,并通过功率电阻消耗掉电机m1的机械能,从而使得电机m1停机。
15、优选的,所述整流部包括二极管d3、二极管d5以及二极管d7,所述二极管d3、所述二极管d5以及所述二极管d7相互并联,所述二极管d3、所述二极管d5以及所述二极管d7的正极均电性连接于电机,所述二极管d3、所述二极管d5以及所述二极管d7的负极均电性连接于所述继电器。
16、通过采用上述技术方案,二极管d3、二极管d5以及二极管d7的设置,使得将电机m1输出的交流电整流成直流电。
17、优选的,所述三极管为npn型三极管。
18、通过采用上述技术方案,当光耦u1导通时,电阻r3和电阻r4的设置,使得三极管q1的基极电压大于三极管q1的发射极电压,从而使得三极管q1导通。
19、综上所述,本技术包括以下至少一种有益技术效果:
20、1.通过功率电阻的设置,使得多轴伺服共用同一个功率电阻,伺服驱动器出现异常时,功率电阻消耗掉电机的机械能,从而使得电机停机,有效地减少了当将动态制动电路应用于多轴伺服时,需要根据多轴伺服的轴数配备同等数量的功率电阻,电路板所需的结构空间较大的情况;
21、2.通过在ipm驱动单元内设置整流部,当伺服驱动器出现异常时,ipm内部电路以及整流部将电机m1输出的交流电整流成直流电,并通过功率电阻消耗掉电机m1的机械能,从而使得电机m1停机。
- 还没有人留言评论。精彩留言会获得点赞!