一种环卫保洁车及其吸口智能调节方法和系统与流程
[0001]
本发明涉及一种环卫保洁车及其吸口智能调节方法和系统,属于环卫车技术领域。
背景技术:
[0002]
保洁车辆在进行道路清扫作业时可能会遇到各种各样、形态不一的垃圾物,实际作业过程中,司机需要边开车边观察待作业路面上垃圾物的情况,并根据观察到的垃圾物情况手动操作按钮来调节吸口的大小,使垃圾能顺利进入到吸口内。这种情况下,司机需要同时完成开车、观察路面和手动操作按钮三项工作,操作复杂度高且劳动强度高。
[0003]
另外,司机通过主观判断确定吸口的调节程度,往往会出现吸口调节过大或过小的情况。当吸口调节过大时,会导致吸口处的吸力变小,出现无法将垃圾吸起的情况,影响垃圾清扫效果;当吸口调节过小时,会导致垃圾卡在吸口处无法进入吸口,进而出现垃圾在吸口处堆积并外溢的情况,影响作业质量;而且,司机通过主观判断确定吸口的调节时机,还会出现吸口调节过早或过晚的情况。当需要将吸口调大但吸口调节过早时,会导致吸口处的吸力提前变小,影响途中垃圾的清扫效果;当需要将吸口调大但吸口调节过晚时,则导致因吸口还没有打开到能将垃圾吸入的程度而使垃圾卡在吸口处,同样会出现垃圾在吸口处堆积并外溢的情况,影响作业质量。
[0004]
综上所述,目前仅凭司机主观判断难以准确确定吸口的调节程度和吸口的调节时机,导致垃圾清扫效果较差。
技术实现要素:
[0005]
本发明的目的是提供一种环卫保洁车及其吸口智能调节方法和系统,用以解决目前难以准确判断吸口调节程度,导致垃圾清扫效果差的问题。
[0006]
为实现上述目的,本发明提供了一种环卫保洁车吸口智能调节方法,该方法包括以下步骤:
[0007]
获取车辆前方待作业路面图像;
[0008]
对所述图像进行处理,得到待作业路面上最大垃圾物的外形尺寸;
[0009]
根据所述最大垃圾物的外形尺寸计算吸口目标开度,使吸口目标开度大于或等于最大垃圾物的外形尺寸;
[0010]
将吸口的大小调节到所述吸口目标开度。
[0011]
本发明还提供了一种环卫保洁车吸口智能调节系统,包括图像采集装置、处理器和存储器,所述图像采集装置用于采集车辆前方待作业路面图像,并将采集到的图像传输给处理器,所述处理器用于运行存储在所述存储器中的程序指令以实现以上环卫保洁车吸口智能调节方法。
[0012]
本发明还提供了一种环卫保洁车,包括车辆本体和吸盘,还包括环卫保洁车吸口智能调节系统,该系统包括图像采集装置、处理器和存储器,所述图像采集装置用于采集车
辆前方待作业路面图像,并将采集到的图像传输给处理器,所述处理器用于运行存储在所述存储器中的程序指令以实现以上环卫保洁车吸口智能调节方法。
[0013]
本发明的有益效果是:进行垃圾清扫作业时,吸口目标开度不是由人为确定,而是由待作业路面上最大垃圾物的外形尺寸确定,实现了吸口调节程度的准确判断,确保了将吸口的大小调节到吸口目标开度时,待作业路面上包含最大垃圾物在内的所有垃圾均能顺利进入吸口,垃圾清扫效果好;另外,吸口开度调节自动实现,无需人为干预,不仅使得垃圾清扫作业更加标准化、规范化,还大大降低了司机的操作复杂度及劳动强度。
[0014]
进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,当所述吸口目标开度大于吸口额定开度时,将吸口的大小调节到吸口目标开度;否则,吸口的大小维持吸口额定开度。
[0015]
当吸口目标开度小于或等于吸口额定开度时,无需将吸口的大小调节到吸口目标开度,只要维持吸口额定开度就可以确保最大垃圾物能顺利进入吸口,因此只有在吸口目标开度大于吸口额定开度时,才将吸口的大小调节到吸口目标开度,能减少吸口的调节次数,提高垃圾清扫效率。
[0016]
进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,该方法还包括以下步骤:
[0017]
获取当前吸口开度;
[0018]
在吸口目标开度和当前吸口开度均大于吸口额定开度且吸口目标开度大于当前吸口开度时,将吸口的大小调节到吸口目标开度;否则,吸口的大小维持当前吸口开度。
[0019]
在吸口目标开度和当前吸口开度均大于吸口额定开度,但吸口目标开度小于或等于当前吸口开度时,无需将吸口的大小调节到吸口目标开度,只要维持当前吸口开度就可以确保最大垃圾物能顺利进入吸口,因此,只有在吸口目标开度和当前吸口开度均大于吸口额定开度且吸口目标开度大于当前吸口开度时,才将吸口的大小调节到吸口目标开度,能进一步减少吸口的调节次数,提高垃圾清扫效率。
[0020]
进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,该方法还包括以下步骤:
[0021]
获取车辆作业状态信息,所述车辆作业状态信息包括当前吸口开度、当前实时车速和吸口单位时间的调节量;
[0022]
对所述图像进行处理,得到待作业路面上最大垃圾物到吸口的距离;
[0023]
根据吸口目标开度、车辆作业状态信息和最大垃圾物到吸口的距离,计算吸口调节时刻;
[0024]
在所述吸口调节时刻开始调节吸口的大小直至将吸口的大小调节到吸口目标开度。
[0025]
根据吸口目标开度、当前吸口开度、当前实时车速、吸口单位时间的调节量和最大垃圾物到吸口的距离,计算吸口调节时刻,以确定吸口调节的最佳时机,确保车辆到达最大垃圾物所在处时,吸口正好打开到能将其吸入的程度(即吸口目标开度),使最大垃圾物顺利进入吸口,不会出现垃圾在吸口处堆积的情况,确保作业质量;并且,在吸口调节时刻之前的一段时间内,吸口保持当前吸口开度,不影响途中其他垃圾的吸收,垃圾清扫效果好。
[0026]
为了实现吸口调节时刻的计算,进一步地,在上述环卫保洁车及其吸口智能调节
方法和系统中,所述吸口调节时刻t为:t={(l
min
/v)-[(p-p0)/δp]},其中,l
min
为最大垃圾物到吸口的距离,v为当前实时车速,p为吸口目标开度,p0为当前吸口开度,δp为吸口单位时间的调节量。
[0027]
为了实现吸口大小的调整,进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,通过调整吸口挡板的旋转程度或者调整吸盘的离地间隙来调节吸口的大小。
[0028]
为了实现待作业路面上最大垃圾物的外形尺寸的自动识别,进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,利用深度学习算法对所述图像进行处理,得到待作业路面上最大垃圾物的外形尺寸。
[0029]
为了实现待作业路面上最大垃圾物到吸口的距离的自动识别,进一步地,在上述环卫保洁车及其吸口智能调节方法和系统中,利用深度学习算法对所述图像进行处理,得到待作业路面上最大垃圾物到吸口的距离。
附图说明
[0030]
图1是本发明方法实施例中吸口智能调节方法流程图;
[0031]
图2是本发明方法实施例中第一种吸盘的结构示意图;
[0032]
图3是本发明方法实施例中第二种吸盘的结构示意图;
[0033]
图4是本发明系统实施例中第一种吸口智能调节系统的结构示意图;
[0034]
图5是本发明系统实施例中第二种吸口智能调节系统的结构示意图;
[0035]
图中,1是吸管,2是吸盘前端,3是挡胶皮,2-1是提升油缸,3-1是旋转油缸。
具体实施方式
[0036]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例对本发明进行进一步详细说明。
[0037]
方法实施例:
[0038]
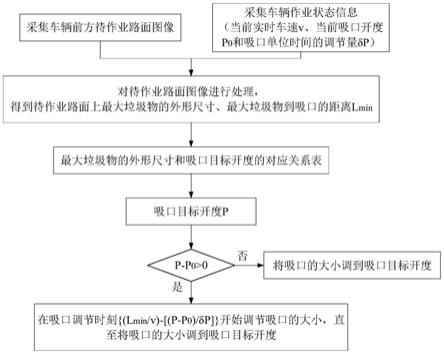
如图1所示,本实施例的环卫保洁车吸口智能调节方法(以下简称吸口智能调节方法),包括以下步骤:
[0039]
获取车辆前方待作业路面图像和车辆作业状态信息(包括当前实时车速、当前吸口开度和吸口单位时间的调节量);
[0040]
利用深度学习算法对车辆前方待作业路面图像进行处理,得到待作业路面上最大垃圾物的外形尺寸和待作业路面上最大垃圾物到吸口的距离;其中,待作业路面上最大垃圾物到吸口的距离可以是最大垃圾物的边缘到吸口的最近距离,也可以是最大垃圾物的边缘到吸口的平均距离;
[0041]
根据最大垃圾物的外形尺寸计算吸口目标开度,使吸口目标开度大于或等于最大垃圾物的外形尺寸,具体地,利用提前制作的最大垃圾物的外形尺寸和吸口目标开度的对应关系表,通过查表的方式获得吸口目标开度;
[0042]
当吸口目标开度大于当前吸口开度时,计算吸口调节时刻,在吸口调节时刻开始调节吸口的大小直至将吸口的大小调到吸口目标开度;当吸口目标开度小于或等于当前吸口开度时,将吸口的大小调到吸口目标开度,但此时不限定吸口调节的具体时刻,只要保证车辆到达最大垃圾物所在处时,吸口已调节到吸口目标开度即可。
[0043]
其中,吸口大小的具体调整方法与吸盘的实际结构有关,例如:第一种吸盘的结构如图2所示,该吸盘的吸盘前端2连接吸管1,吸盘前端2设置有挡胶皮3,提升油缸2-1能将吸盘前端2提起或放下,因此当吸盘结构如图2所示时,可通过将吸盘前端部分提起或放下来调整吸盘的离地间隙,进而实现吸口大小的调整;第二种吸盘的结构如图3所示,该吸盘的吸盘前端2连接吸管1,吸盘前端2设置有挡胶皮3,旋转油缸3-1能控制挡胶皮3旋转,因此当吸盘结构如图3所示时,可通过控制吸盘前端挡胶皮旋转来调整挡胶皮的旋转程度,进而实现吸口大小的调整(挡胶皮旋转的幅度越大,吸口开度越大,反之吸口开度越小)。本实施例中,采用挡胶皮作为挡板,作为其他实施方式,挡板的形式不限于挡胶皮,还可以采用其他材质的板子,例如木板。
[0044]
本实施例中,根据吸口目标开度、车辆作业状态信息和最大垃圾物到吸口的距离,计算吸口调节时刻t,t={(l
min
/v)-[(p-p0)/δp]},其中,l
min
为最大垃圾物到吸口的距离,v为当前实时车速,p为吸口目标开度,p0为当前吸口开度,δp为吸口单位时间的调节量。
[0045]
作为其他实施方式,还可以提前制作吸口目标开度、当前吸口开度、吸口单位时间的调节量、当前实时车速、最大垃圾物到吸口的距离和吸口调节时刻的对应关系表,这样就能通过查表的方式得到吸口调节时刻。
[0046]
本实施例中,利用深度学习算法对车辆前方待作业路面图像进行处理,得到待作业路面上最大垃圾物的外形尺寸和待作业路面上最大垃圾物到吸口的距离。
[0047]
具体地,深度学习算法返回最大垃圾物在待作业路面图像中的位置(x,y,w,h),其中,(x,y)为最大垃圾物在图像中的位置,(w,h)为最大垃圾物在图像中的宽度和高度,通过图像与真实空间的仿射变换,获取从图像空间到真实空间的转换关系,计算得到最大垃圾物的实际外形尺寸;根据相机的安装高度、相机的倾斜角度、相机的水平和垂直视角,由三角函数计算出相机的拍摄位置到相机的水平方向的距离,再加上相机到吸口的水平距离即可求出最大垃圾物到吸口的距离。
[0048]
本实施例中,利用相机获取待作业路面图像,作为其他实施方式,还可以利用其他方法获取待作业路面图像,例如3d激光成像法、红外成像法等,配合使用深度学习算法得到待作业路面上最大垃圾物的外形尺寸和待作业路面上最大垃圾物到吸口的距离。
[0049]
本实施例的吸口智能调节方法具有以下优点:(1)根据待作业路面上最大垃圾物的外形尺寸确定吸口目标开度,实现了吸口调节程度的准确判断,确保了将吸口的大小调节到吸口目标开度时,待作业路面上包含最大垃圾物在内的所有垃圾均能顺利进入吸口,垃圾清扫效果好;(2)根据吸口目标开度、当前吸口开度、当前实时车速、吸口单位时间的调节量和最大垃圾物到吸口的距离,确定吸口调节时刻,实现了吸口调节时机的准确判断,确保车辆到达最大垃圾物所在处时,吸口正好打开到能将其吸入的程度(即吸口目标开度),使最大垃圾物顺利进入吸口,不会出现垃圾在吸口处堆积的情况,确保作业质量;并且,在吸口调节时刻之前的一段时间内,吸口保持当前吸口开度,不影响途中其他垃圾的吸收,垃圾清扫效果好;(3)能够实现吸口开度的自动调节,在确保垃圾清扫效果的同时,不仅使得垃圾清扫作业更加标准化、规范化,还大大降低了司机的操作复杂度及劳动强度。
[0050]
作为其他实施方式,还可以在吸口目标开度大于吸口额定开度时,将吸口的大小调节到吸口目标开度;否则,吸口的大小维持吸口额定开度,能有效减少吸口调节的次数,提高垃圾清扫效率。其中,吸口额定开度根据实际需要设置,当吸口的大小等于吸口额定开
度时,能将待作业路面上的大部分垃圾物吸入吸口。
[0051]
作为其他实施方式,还可以在吸口目标开度和当前吸口开度均大于吸口额定开度且吸口目标开度大于当前吸口开度时,将吸口的大小调节到吸口目标开度;否则,吸口的大小维持当前吸口开度,能进一步减少吸口的调节次数,提高垃圾清扫效率。
[0052]
系统实施例:
[0053]
本实施例提供了一种环卫保洁车吸口智能调节系统(以下简称吸口智能调节系统),包括图像采集装置、处理器和存储器,图像采集装置用于采集车辆前方待作业路面图像,并将采集到的图像传输给处理器,处理器用于运行存储在存储器中的程序指令以实现本发明的环卫保洁车吸口智能调节方法,该方法与方法实施例中的环卫保洁车吸口智能调节方法相同,此处不再赘述。
[0054]
其中,图像采集装置的种类可以根据实际需要选择,例如视觉传感器(包括摄像头、相机等)、激光传感器、超声波传感器等,只要其能实现车辆前方待作业路面图像的采集即可。
[0055]
在实际运用中,吸口智能调节系统中的处理器和存储器可以以车载智能终端的形式实现,如图4所示,这时车辆前方待作业路面图像的采集、车辆作业状态信息的获取、吸口调节控制信号(包括吸口目标开度和吸口调节时刻)的生成、执行,均在车端实现。具体过程如下:
[0056]
车辆上设置的n个传感器(n≥1)采集目标作业区域(即车辆前方待作业路面)图像,并将采集的图像发送给车载智能终端;车载智能终端对图像进行处理计算吸口目标开度;车载智能终端实时获取车辆作业状态信息,结合吸口目标开度计算吸口调节时刻;车载智能终端将生成的吸口调节控制信号通过can总线发送给上装控制器;上装控制器根据接收到的吸口调节控制信号,在吸口调节时刻向车辆吸口调节机构发送控制指令,吸口调节机构根据接收到的控制指令调节吸口的大小直至将吸口的大小调到吸口目标开度。
[0057]
在实际运用中,吸口智能调节系统中的处理器和存储器还可以以云平台的形式实现,如图5所示,这时吸口调节控制信号的生成在云端实现,车辆前方待作业路面图像的采集、车辆作业状态信息的获取、吸口调节控制信号的执行在车端实现。具体过程如下:
[0058]
车辆上设置的n个传感器(n≥1)采集目标作业区域图像,并将采集的图像发送给车载网络化终端(具备图像传输能力),车载网络化终端实时获取车辆作业状态信息;车载网络化终端通过无线网络(例如4g/5g)将获取的图像和车辆作业状态信息发送给云平台;云平台对图像进行处理计算吸口目标开度,并结合吸口目标开度计算吸口调节时刻,然后将生成的吸口调节控制信号通过无线网络发送给车载网络化终端;车载网络化终端通过can总线将吸口调节控制信号发送给上装控制器;上装控制器根据接收到的吸口调节控制信号,在吸口调节时刻向车辆吸口调节机构发送控制指令,吸口调节机构根据接收到的控制指令调节吸口的大小直至将吸口的大小调到吸口目标开度。
[0059]
其中,吸口大小的具体调整方法与吸盘的实际结构有关,例如:当吸盘结构如图2所示时,可通过将吸盘前端部分提起或放下来调整吸盘的离地间隙,进而实现吸口大小的调整;当吸盘结构如图3所示时,可通过控制吸盘前端挡胶皮旋转来调整挡胶皮的旋转程度,进而实现吸口大小的调整。
[0060]
环卫保洁车实施例:
[0061]
本实施例提供了一种环卫保洁车,包括车辆本体和吸盘,还包括环卫保洁车吸口智能调节系统,该系统与系统实施例中的环卫保洁车吸口智能调节系统相同,此处不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1