一种重叠双机头桁架机械手的制作方法
[0001]
本发明涉及板式家具生产加工设备技术领域,特别是涉及一种重叠双机头桁架机械手。
背景技术:
[0002]
目前板式家具生产的木板涂装uv自动连线中,往往一个方向进料后会分成两路或者多路进行涂装及下料,相比于包覆线及裁切线,涂装要求的速度和效率更高,普通单机头龙门桁架机构显然无法满足上下料的效率问题。虽然单机头改为双机头,双机头比单机头效率可以提高一倍,但是对于多工位动作时,由于结构空间受限,普通双机头也只能分别在龙门架的两侧位置进行动作,无法跨越每个工位同时进行吸附板件,使得双机头的使用效率大打折扣。
技术实现要素:
[0003]
本发明所要解决的技术问题是,克服现有技术的缺点,提供一种重叠双机头桁架机械手。
[0004]
为了解决以上技术问题,本发明的技术方案如下:一种重叠双机头桁架机械手,包括,机架;外机械手组件,包括滑动安装于所述机架外侧,并可沿所述机架长度方向往复滑动的外滑动座组件,所述外滑动座组件上设置有外升降立柱以及驱动所述外升降立柱沿竖直方向升降的外升降驱动机构,所述外升降立柱的下端设置有用于吸取板件的外吸取机构;内机械手组件,包括滑动安装于所述机架内侧,并可沿所述机架长度方向往复滑动的内滑动座组件,所述内滑动座组件上设置有内升降立柱以及驱动所述内升降立柱沿竖直方向升降的内升降驱动机构,所述内升降立柱的下端设置有用于吸取板件的内吸取机构;以及,横移驱动机构,包括用于驱动所述外滑动座组件沿所述机架长度方向往复滑动的外横移驱动装置以及用于驱动所述内滑动座组件沿所述机架长度方向往复滑动的内横移驱动装置;其中,所述内吸取机构沿所述机架宽度方向的长度小于两根所述外升降立柱之间的间距,使所述内机械手组件可从所述外机械手组件内部穿过。
[0005]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述外滑动座组件包括对称且滑动安装于所述机架外侧的两块外滑动座板,两块所述外滑动座板之间通过外联动架连接,每块所述外滑动座板的外侧均设置有沿竖直方向的外滑动导轨,所述外升降立柱滑动安装于所述外滑动导轨上。
[0006]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述外升降驱动机构包括转动安装于所述外联动架上的外提升轴以及带动所述外提升轴绕其轴线旋转的外驱动伺服电机,所述外提升轴的两端均设置有外传动齿轮,两个所述外升降立柱相向的一侧均设置有沿竖直方向的外传动齿条,两个所述外传动齿轮分别与对应的所述外传动齿条相啮合。
[0007]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述外吸取机构包括外吸取框架,两根所述外升降立柱的下端分别连接于所述外吸取框架长度方向的两端,所述外吸取框架的下端设置有若干个吸盘组件,所述吸盘组件均通过气管和电磁阀组件与负压风机连通。
[0008]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述内滑动座组件包括对称且滑动安装于所述机架内侧的两块内滑动座板,两块所述内滑动座板之间通过内联动架连接,每块所述内滑动座板的内侧均设置有沿竖直方向的内滑动导轨,所述内升降立柱滑动安装于所述内滑动导轨上,其中,所述内联动架与所述外联动架位于不同水平面内。
[0009]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述内升降驱动机构包括转动安装于所述内联动架上的内提升轴以及带动所述内提升轴绕其轴线旋转的内驱动伺服电机,所述内提升轴的两端均设置有内传动齿轮,两个所述内升降立柱相向的一侧均设置有沿竖直方向的内传动齿条,两个所述内传动齿轮分别与对应的所述内传动齿条相啮合。
[0010]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述内吸取组件包括内吸取框架,两根所述内升降立柱的下端分别连接于所述内吸取框架长度方向的两端,所述内吸取框架的下端设置有若干吸盘组件,所述吸盘组件均通过气管和电磁阀组件与负压风机连通。
[0011]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述外横移驱动装置包括转动安装于所述机架上的外主动轴和外从动轴以及驱动外主动轴旋转的外横移驱动电机,所述外主动轴与所述外从动轴均沿所述机架宽度方向设置,且分别位于所述机架长度方向的两端,所述外主动轴与所述外从动轴之间通过外同步带传动连接,所述外联动架上设置有同步带压板,所述外联动架通过所述同步带压板与所述外同步带连接。
[0012]
作为本发明所述重叠双机头桁架机械手的一种优选方案,其中:所述内横移驱动装置包括转动安装于所述机架上的内主动轴和内从动轴以及驱动所述内主动轴旋转的内横移驱动电机,所述内主动轴与所述内从动轴均沿所述机架的宽度方向设置,且分别位于所述机架长度方向的两端,所述内主动轴与所述外主动轴之间通过内同步带传动连接,所述内联动架上设置有同步带压板,所述内联动架通过所述同步带压板与所述内同步带连接。
[0013]
本发明的有益效果是:本发明中内机械手组件和外机械手组件均可沿机架左右横移,内吸取机构和外吸取机构均可沿竖直方向升降,且内机械手组件可在外机械手组件内部穿插横移,使内机械手组件和外机械手组件可在多个工位之间进行工作,且可穿插交互进行取板运板,两者之间互不干涉和影响,大大提高了自动化生产线上下料的整体效率。
附图说明
[0014]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它
的附图。
[0015]
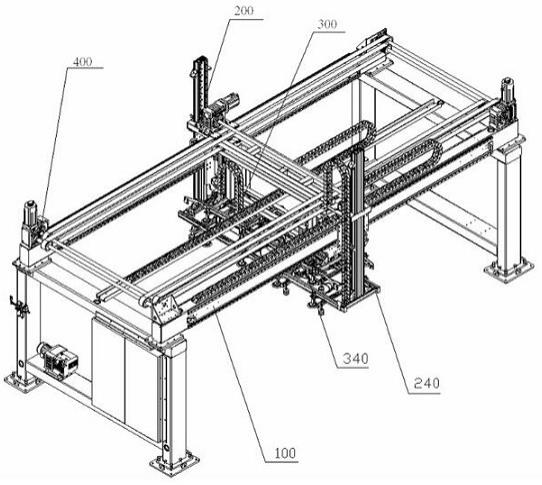
图1为本发明提供的重叠双机头桁架机械手的整体结构示意图;图2为本发明提供的重叠双机头桁架机械手中机架的结构示意图;图3为去除外吸取机构后的外机械手组件的结构示意图;图4为图3中a处的放大示意图;图5为外吸取机构的结构示意图;图6为去除内吸取机构后的内机械手组件的结构示意图图7为图6的主视图;图8为内吸取机构的结构示意图;图9为本发明提供的重叠双机头桁架机械手中横移驱动机构的结构示意图;其中:100、机架;200、外机械手组件;300、内机械手组件;400、横移驱动机构;110、横梁;111、滑轨;210、外滑动座组件;220、外升降立柱;230、外升降驱动机构;240、外吸取机构;211、外滑动座板;212、外联动架;231、外提升轴;232、外驱动伺服电机;233、外传动齿轮;221、外传动齿条;241、外吸取框架;242、吸盘组件;243、气管;244、电磁阀组件;310、内滑动座组件;320、内升降立柱;330、内升降驱动机构;340、内吸取机构;311、内滑动座板;312、内联动架;331、内提升轴;332、内驱动伺服电机;333、内传动齿轮;321、内传动齿条;341、内吸取框架;411、外主动轴;412、外从动轴;413、外横移驱动电机;414、外同步带;415、同步带压板;421、内主动轴;422、内从动轴;423、内横移驱动电机;424、内同步带。
具体实施方式
[0016]
为使本发明的内容更容易被清楚地理解,下面根据具体实施方式并结合附图,对本发明作出进一步详细的说明。
[0017]
本实施例提供了一种重叠双机头桁架机械手,包括机架100、滑动安装在机架100上的外机械手组件200和内机械手组件300,外机械手组件200和内机械手组件300可沿机架100横向移动,并且穿插交互进行取板运板。
[0018]
具体的,机架100包括支撑架以及固定安装在支撑架上端的两根横梁110,两根横梁110位于同一水平面内,且互相平行并沿机架100的长度方向设置。在每根横梁110的左右两侧均设置有沿横梁110长度方向的滑轨111。
[0019]
外机械手组件200包括两块外滑动座板211,每块外滑动座板211的一侧均设置有与横梁110上的滑轨111相匹配的滑块,两块外滑动座板211通过滑块与滑轨111的配合,对称且滑动安装在两根横梁110的外侧。在两块外滑动座板211之间设置有外联动架212,该外联动架212的两端分别于两块外滑动座板211固定连接,且该外联动架212位于横梁110的上方。在两块外滑动座板211的外侧均设置有沿竖直方向的外滑动导轨,在每条外滑动导轨上均滑动安装有外升降立柱220。两根外升降立柱220的下端固定安装有用于吸取板件的外吸取机构240。
[0020]
其中,外吸取机构240包括由铝型材搭接而成的外吸取框架241,在该外吸取框架241的下端固定安装有多个吸盘组件242,这些吸盘组件242均通过气管243与固定安装在机架100上的负压风机连通。负压风机启动后使吸盘组件242产生吸力,以吸取板件。需要说明的是,在气管243上还连通有电磁阀组件244,通过电磁阀组件244可控制气管243的通闭,当
需要吸取板件时,气管243导通,使吸盘产生吸力,当需要将板件放下时,气管243内部不导通,使吸盘的吸力消失,板件受重力作用自然放下。
[0021]
另外,在外联动架212上还设置有用于驱动外升降立柱220升降的外升降驱动机构230,该外升降驱动机构230包括外驱动伺服电机232和外提升轴231。其中,外提升轴231通过固定安装在外联动架212上的轴承转动安装在外联动架212上,在外提升轴231的两端均固定安装有外传动齿轮233,在两根外升降立柱220相向的一侧均固定安装有沿竖直方向的外传动齿条221,外提升轴231两端的外传动齿轮233分别与相邻外升降立柱220上的外传动齿条221相啮合。外驱动伺服电机232与外提升轴231相连,带动外提升轴231绕自身轴线旋转。当外驱动伺服电机232工作时,外提升轴231旋转,带动其两端的外传动齿轮233旋转,由于外传动齿轮233与外传动齿条221啮合,且外提升轴231转动安装在外联动架212上,而外升降立柱220滑动安装在外滑动导轨上,因此外升降立柱220会沿外滑动导轨升降,从而带动外吸取框架241以及吸盘升降。
[0022]
在机架100的横梁110上通过轴承转动安装有外主动轴411和外从动轴412,外主动轴411和外从动轴412均沿机架100的宽度方向设置,且外主动轴411和外从动轴412分别位于横梁110长度方向的两端。在外主动轴411的两端均安装有主动带轮,在外从动轴412的两端均安装有从动带轮,在主动带轮与相对的从动带轮之间通过外同步带414传动连接。同时,在外联动架212上还设置有同步带压板415,该同步带压板415压接在外同步带414上,使外联动架212随外同步带414同步移动。在机架100上还设置有用于带动外主动轴411旋转的外横移驱动电机413,当该外横移驱动电机413工作时,会带动外主动轴411绕自身轴线旋转,随后外主动轴411端部的主动带轮通过外同步带414带动从动带轮旋转,使外同步带414沿横梁110长度方向循环移动,外同步带414在移动过程中会带动外联动架212移动,进而使整个外机械手组件200沿机架100长度方向移动。
[0023]
内机械手组件300包括两块内滑动座板311,每块内滑动座板311的一侧均设置有与横梁110上的滑轨111相匹配的滑块,两块内滑动座板311通过滑块与滑轨111的配合,对称且滑动安装在两根横梁110的内侧。在两块内滑动座板311之间设置有内联动架312,该内联动架312的两端分别于两块内滑动座板311固定连接。该内联动架312位于横梁110的下方,且内联动架312与外联动架212沿机架100长度方向移动时相互之间不会产生阻碍。在两块内滑动座板311远离横梁110的一侧均设置有沿竖直方向的内滑动导轨,在每条内滑动导轨上均滑动安装有内升降立柱320。两根内升降立柱320的下端固定安装有用于吸取板件的内吸取机构340。
[0024]
其中,内吸取机构340包括由铝型材搭接而成的内吸取框架341,在该内吸取框架341的下端固定安装有多个吸盘组件242,这些吸盘组件242均通过气管243与固定安装在机架100上的负压风机连通。内吸取机构340上的吸盘组件242与外吸取机构240上的吸盘组件242的工作原理一致。
[0025]
另外,在内联动架312上还设置有用于驱动内升降立柱320升降的内升降驱动机构330,该内升降驱动机构330包括内驱动伺服电机332和内提升轴331。其中,内提升轴331通过固定安装在内联动架312上的轴承转动安装在内联动架312上,在内提升轴331的两端均固定安装有内传动齿轮333,在两根内升降立柱320相向的一侧均固定安装有沿竖直方向的内传动齿条321,内提升轴331两端的内传动齿轮333分别与相邻内升降立柱320上的内传动
齿条321相啮合。内驱动伺服电机332与内提升轴331相连,带动内提升轴331绕自身轴线旋转。当内驱动伺服电机332工作时,内提升轴331旋转,带动其两端的内传动齿轮333旋转,由于内传动齿轮333与内传动齿条321啮合,且内提升轴331转动安装在外联动架212上,而内升降立柱320滑动安装在内滑动导轨上,因此内升降立柱320会沿外滑动导轨升降,从而带动内吸取框架341以及吸盘升降。
[0026]
在机架100的横梁110上通过轴承还转动安装有内主动轴421和内从动轴422,内主动轴421和外内动轴也沿机架100的宽度方向设置,且内主动轴421和内从动轴422分别位于横梁110长度方向的两端。在内主动轴421的两端同样安装有主动带轮,在内从动轴422的两端同样安装有从动带轮,在主动带轮与相对的从动带轮之间通过内同步带424传动连接。同时,在内联动架312上也设置有同步带压板415,该同步带压板415压接在内同步带424上,使内联动架312随内同步带424同步移动。在机架100上还设置有用于带动内主动轴421旋转的内横移驱动电机423,当该内横移驱动电机423工作时,会带动内主动轴421绕自身轴线旋转,随后内主动轴421端部的主动带轮通过内同步带424带动从动带轮旋转,使内同步带424沿横梁110长度方向循环移动,内同步带424在移动过程中会带动内联动架312移动,进而使整个内机械手组件300沿机架100长度方向移动。
[0027]
需要说明的是,内吸取框架341的长度小于两根外升降立柱220之间的间距,这样当外机械手组件200和内机械手组件300同时沿机架100长度方向相向移动时,内机械手组件300可从外机械手组件200内部穿过,即整个内机械手组件300从两根外升降立柱220、外联动架212以及外吸取框架241围成的矩形框架中部穿过,使外机械手组件200和内机械手组件300可穿插交互进行取板运板,两者之间互不干涉和影响。
[0028]
较佳的,在横梁110的内侧和外侧,沿长度方向的两端均固定安装有缓冲座,并在缓冲座上设置有聚氨酯缓冲器。当内滑动座板311以及外滑动座板211移动至横梁110的端部时,缓冲座可对其进行缓冲和限位。
[0029]
另外,在任意一根横梁110内侧的两端均安装有感应板,对应地在滑动安装于该横梁110上的外滑动座板211以及内滑动座板311上均设置有感应块。当外滑动座板211或内滑动座板311上的感应块移动至感应板的感应区域内后,该感应板可传输信号至外横移驱动电机413或内横移驱动电机423,使其停止运行,从而将外机械手组件200或内机械手组件300限位于横梁110的端部。需要说明的是,两块感应板位于横梁110同一侧上的两个缓冲座之间。
[0030]
该重叠双机头桁架机械手在使用时,先将机架100横跨在多个工位的输送线上,以下料为例,机架100横跨在四个工位的输送线上,这四条输送线依次为动力滚筒升降机一(其上放有从rgv运送过来的垫板)、动力滚筒升降机二、常规动力滚筒输送线和动力滚筒升降机三。随后外横移驱动电机413和内横移驱动电机423启动,带动外同步带414和内同步带424移动,使外机械手组件200和内机械手组件300沿机架100长度方向移动,使外机械手组件200和内机械手组件300先到运动至放有板件的动力滚筒升降机一上方。当外机械手组件200的外吸取机构240移动至垫板正上方后,外驱动伺服电机232工作,使外升降立柱220下降,进而使外吸取机构240的吸盘组件242快速下探到垫板上表面并吸住垫板,随后外升降立柱220上升,外同步带414带动外机械手组件200移动至动力滚筒升降机二处,之后外升降立柱220下降,将垫板放在动力滚筒升降机二上;在外机械手组件200横向移动至动力滚筒
升降机二时,内机械手组件300同时横向穿插移动至动力滚筒升降机一处,随后进行取板作业,取板完成后内机械手组件300移动至动力滚筒升降机三,将垫板放置在动力滚筒升降机三上;在内机械手组件300移动过程中,外机械手组件200同时进行穿插横向移动,并移动至常规动力滚筒输送线上,进行取板作业,随后横移至相应的升降机处,将板件放置在垫板上方,内机械手组件300在移动完垫板之后也进行上述操作,以此循环往复,直至板件放满。
[0031]
因此,本发明中内机械手组件300和外机械手组件200可在多个工位之间进行工作,且可穿插交互进行取板运板,两者之间互不干涉和影响,大大提高了自动化生产线上下料的整体效率。
[0032]
除上述实施例外,本发明还可以有其他实施方式;凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1