一种含有复合滑动伸缩杆的并联机构的制作方法
[0001]
本发明属于并联机构技术领域,特别是涉及一种含有复合滑动伸缩杆的并联机构。
背景技术:
[0002]
并联机构在现代制造业中得到了广泛的应用,与串联机构相比,并联机构具有刚度大、结构稳定、承载能力大以及精度高等优点。加工复杂的零件对于机构的灵活性要求很高,至少需要五个自由度的运动能力。
[0003]
若将复合滑动伸缩杆的构型方式应用到并联机构中,可以有效地利用空间,并且具有稳定性强、寿命长的优点。中国专利cn201610460193.8号中公开了一种带有伸缩连接杆的新型滑动轮,用户在使用过程中能够通过调节伸缩连接杆来改变两个滑动平板的距离,与未采用伸缩杆相比可以负载更重更长的物品,更加方便,性能更加全面,安全性也更高。中国专利cn87216160号中公开了一种带有伸缩杆的无铊伸缩杆秤,在备用的时候可以将整个伸缩杆全部缩到秤杆套内,在使用的过程中也可以通过调节伸缩杆来使其与重物达到平衡,这个带有伸缩杆的秤具有存放方便、不易损坏、不易失准等优点。但目前具有伸缩杆的机构多采用单一的伸缩杆来节省空间,并不稳定,也更易受到损坏。
技术实现要素:
[0004]
为了解决上述问题,本发明的目的在于提供一种含有复合滑动伸缩杆的并联机构。
[0005]
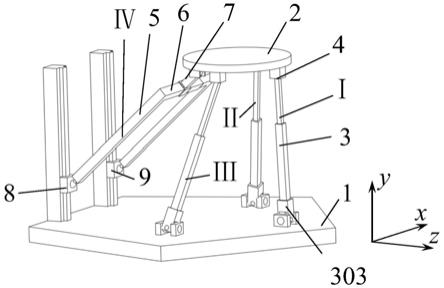
为了达到上述目的,本发明提供的含有复合滑动伸缩杆的并联机构包括定平台、动平台、第一支链、第二支链、第三支链和第四支链;
[0006]
其中,定平台包括底座、第一导轨、第二导轨以及三个第一虎克铰支座;其中,底座固定在地面上;三个第一虎克铰支座呈品字形安装在底座的表面一侧;第一导轨和第二导轨均为直线导轨,下端间隔距离对称固定在底座的表面另一侧,并且其上的轨道面向位于中间部位的第一虎克铰支座;
[0007]
动平台包括台板、三个第一球铰支座和一个第二铰接支座,三个第一球铰支座和一个第二铰接支座均匀固定在台板的底面外侧部位;
[0008]
第一支链、第二支链和第三支链结构完全相同且均为滑动伸缩杆支链;每个支链均包括第一滑动伸缩杆、第一球铰和第一虎克铰;其中第一滑动伸缩杆包括第二连杆以及后部嵌套在第二连杆内的第一连杆;第一连杆的前端通过第一球铰与动平台上的一个第一球铰支座相连;第二连杆的末端通过第一虎克铰与定平台上的一个第一虎克铰支座相接;
[0009]
第四支链为复合滑动伸缩杆支链,包括第三连杆、第四连杆、第五连杆、第一滑块以及第二滑块;其中第一滑块以移动的方式安装在第一导轨的轨道上,中部设有第二球铰支座;第二滑块以移动的方式安装在第二导轨的轨道上,中部设有第三球铰支座;第三连杆为l形杆,一端设有第二球铰,另一端为空心结构,并通过第二球铰连接在第一滑块8的第二
球铰支座上;第四连杆为l形杆,一端设有第三球铰,另一端插入在第三连杆的空心端内部,并通过第三球铰连接在第二滑块的第三球铰支座上;第三连杆和第四连杆构成门字形的第二滑动伸缩杆;第五连杆的一端套装在第三连杆的上端外部,另一端与动平台上的第二铰接支座相连构成第二转动副;第三连杆与第五连杆组成第三滑动伸缩杆,第二滑动伸缩杆与第三滑动伸缩杆组成复合滑动伸缩杆结构。
[0010]
所述的底座采用正五边形板。
[0011]
所述的台板采用圆形板。
[0012]
本发明提供的含有复合滑动伸缩杆的并联机构具有以下优点:
[0013]
1、采用复合滑动伸缩杆支链,减少了机构的支链数,降低干涉,从而可增加机构的灵活性,扩大机构的工作空间,使机构可以完成相对于单一伸缩杆机构更加复杂的运动。
[0014]
2、采用三条结构完全相同的滑动伸缩杆支链,可增加机构在竖直方向的传动效率,而且结构简单、装配简便,降低了制造加工难度。
附图说明
[0015]
图1为本发明提供的含有复合滑动伸缩杆的并联机构结构示意图。
[0016]
图2为本发明中定平台结构示意图。
[0017]
图3为本发明中动平台结构示意图。
[0018]
图4为本发明中第五连杆结构示意图。
[0019]
图5为本发明中第二连杆结构示意图。
[0020]
图6为本发明中第一连杆结构示意图。
[0021]
图7为本发明中第三连杆结构示意图。
[0022]
图8为本发明中第四连杆结构示意图。
[0023]
图9为本发明中第一滑块结构示意图。
[0024]
图10为本发明中第二滑块结构示意图。
[0025]
图中:1、定平台;101、底座;102、第一导轨;103、第二导轨;104、第一虎克铰支座;2、动平台;201、台板;202、第一球铰支座;203、第二铰接支座;3、第一滑动伸缩杆;301、第一连杆;302、第二连杆;303、第一虎克铰;4、第一球铰;5、第二滑动伸缩杆;501、第三连杆;502、第四连杆;6、第三滑动伸缩杆;7、第五连杆;701、第二转动副;8、第一滑块;801、第二球铰;802、第二球铰支座;9、第二滑块;901、第三球铰;902、第三球铰支座。
具体实施方式
[0026]
下面结合附图对本发明提供的含有复合滑动伸缩杆的并联机构进行详细说明。
[0027]
如图1—图10所示,本发明提供的含有滑动复合伸缩杆的并联机构包括定平台1、动平台2、第一支链-、第二支链-、第三支链-和第四支链-;
[0028]
其中,定平台1包括底座101、第一导轨102、第二导轨103以及三个第一虎克铰支座104;其中,底座101固定在地面上;三个第一虎克铰支座104呈品字形安装在底座101的表面一侧;第一导轨102和第二导轨103均为直线导轨,下端间隔距离对称固定在底座101的表面另一侧,并且其上的轨道面向位于中间部位的第一虎克铰支座104;
[0029]
动平台2包括台板201、三个第一球铰支座202和一个第二铰接支座203,三个第一
球铰支座202和一个第二铰接支座203均匀固定在台板201的底面外侧部位;
[0030]
第一支链-、第二支链-和第三支链-结构完全相同且均为滑动伸缩杆支链;每个支链均包括第一滑动伸缩杆3、第一球铰4和第一虎克铰303;其中第一滑动伸缩杆3包括第二连杆302以及后部嵌套在第二连杆302内的第一连杆301;第一连杆301的前端通过第一球铰4与动平台2上的一个第一球铰支座202相连;第二连杆302的末端通过第一虎克铰303与定平台1上的一个第一虎克铰支座104相接;
[0031]
第四支链-为复合滑动伸缩杆支链,包括第三连杆501、第四连杆502、第五连杆7、第一滑块8以及第二滑块9;其中第一滑块8以移动的方式安装在第一导轨102的轨道上,中部设有第二球铰支座802;第二滑块9以移动的方式安装在第二导轨103的轨道上,中部设有第三球铰支座902;第三连杆501为l形杆,一端设有第二球铰801,另一端为空心结构,并通过第二球铰801连接在第一滑块8的第二球铰支座802上;第四连杆502为l形杆,一端设有第三球铰901,另一端插入在第三连杆501的空心端内部,并通过第三球铰901连接在第二滑块9的第三球铰支座902上;第三连杆501和第四连杆502构成门字形的第二滑动伸缩杆5;第五连杆7的一端套装在第三连杆501的上端外部,另一端与动平台2上的第二铰接支座203相连构成第二转动副701;第三连杆501与第五连杆7组成第三滑动伸缩杆6,第二滑动伸缩杆5与第三滑动伸缩杆6组成复合滑动伸缩杆结构。
[0032]
所述的底座101采用正五边形板。
[0033]
所述的台板201采用圆形板。
[0034]
现以正五边形的底座101前后方向作为x轴方向,左右方向作为z轴方向,垂直方向作为y轴方向,对本发明提供的含有复合滑动伸缩杆的并联机构的工作原理阐述如下:
[0035]
本发明提供的含有复合滑动伸缩杆的并联机构选取三个第一滑动伸缩杆3、第一滑块8和第二滑块9作为主动副,可实现动平台2的五个自由度;通过驱动五个主动副,使五个主动副在y轴方向的移动分量相等,可实现动平台2在y轴的移动自由度;通过驱动五个主动副,使五个主动副在z轴方向的移动分量相等,可实现动平台2在z轴的移动自由度;通过驱动三条第一滑动伸缩杆3,锁定剩余两个主动副,使三条第一滑动伸缩杆3在x轴方向的移动分量相等,可实现动平台2在x轴的移动自由度;通过驱动第一滑块8和第二滑块9,配合剩余三个主动副,可实现动平台2绕x轴的转动自由度;通过驱动第一滑块8与第二滑块9在y轴方向反向运动,配合剩余三个主动副,可实现动平台2绕z轴的转动自由度;由于第三连杆501和第四连杆502在z轴方向的投影长度始终相等,限制了动平台2绕y轴的转动自由度;最终,动平台2可实现三个方向的移动自由度与绕x、z轴的转动自由度共五个自由度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1