一种具有锁紧功能的底座及其工业机器人的制作方法
[0001]
本实用新型涉及工业机器人的打磨等应用领域,特别是一种具有锁紧功能的工业机器人底座。
背景技术:
[0002]
工业机器人在进行打磨、搬运、码垛等作业时,机械臂上安装的打磨工具、搬运的货物对工业机器人的机械臂受力会产生一定的影响,当在工业机器人运动过程中,机械臂可达范围越大,作用力臂越长,对机器人底座的冲击就越大。为保证工业机器人能够长期稳定工作,需要机器人底座即具备稳定的刚性,保证打磨时可靠性;同时也需要具备一定的弹性,降低打磨时对机器人本体的冲击,提高机器人的使用寿命。
技术实现要素:
[0003]
有鉴于此,本实用新型的目的在于提供一种具有锁紧功能的底座及其工业机器人,该底座通过锁紧气缸进行锁紧,并能够根据工业机器人实际情况进行锁紧力配置。
[0004]
为达到上述目的,本实用新型提供如下技术方案:
[0005]
本实用新型提供的具有锁紧功能的底座,包括地轨架、导轨、安装板、运动控制装置、锁紧力信息采集单元和底座锁紧装置;
[0006]
所述导轨设置于地轨架上,所述安装板设置于导轨上,所述安装板在运动控制装置的作用下实现与导轨滑动配合,以适于设置于安装板上的设备能沿导轨方向移动;
[0007]
所述底座锁紧装置设置于安装板和地轨架之间;
[0008]
所述锁紧力信息采集单元用于获取设置于安装板上的加工设备的工作状态信号,并将工作状态信号输入到底座锁紧装置中;
[0009]
所述底座锁紧装置通过工作状态信号在安装板和地轨架之间产生相互作用锁紧力,并通过锁紧力将安装板锁紧于地轨架上。
[0010]
进一步,所述底座锁紧装置包括固定部、锁紧板和驱动机构;
[0011]
所述固定部沿安装板移动方向设置于地轨架上,所述锁紧板设置于安装板上,所述驱动机构接收所述锁紧力信息采集单元采集到的工作状态信号,以适于所述锁紧板在驱动机构的作用下与固定部之间产生对应的锁紧力,从而实现锁紧功能。
[0012]
进一步,所述驱动机构包括锁紧气缸、电子调压阀和控制电路;
[0013]
所述锁紧气缸设置于安装板上,所述锁紧气缸与电子调压阀连接,所述控制电路与电子调压阀连接,所述控制电路用于接收所述锁紧力信息采集单元采集到的工作状态信号,以适于所述控制电路根据工作状态信号对锁紧气缸产生对应的气缸压力,所述锁紧气缸在电子调压阀的控制下,通过锁紧气缸活塞杆的伸缩使得锁紧板与固定部之间产生相互作用,从而调节锁紧板与固定部之间的锁紧力。
[0014]
进一步,所述锁紧力信息采集单元为设置于地轨架上的用于采集安装板振动信号的振动位移传感器。
[0015]
进一步,所述固定部为设置于地轨架上的相互平行的槽钢,所述槽钢固定在地轨架两端的横梁上,所述槽钢间的间距与锁紧板配合,以保证锁紧板与槽钢之间接触。
[0016]
进一步,所述运动控制装置包括齿轮、齿条和驱动电机;所述齿条设置于地轨架上,所述驱动电机设置于安装板上,所述驱动电机通过齿轮与齿条啮合,从而带动安装板运动。
[0017]
进一步,还包括直线轴承,所述直线轴承沿锁紧气缸的活塞杆方向设置,所述直线轴承一端通过轴套固定在安装板上,所述直线轴承另一端与锁紧板固定连接。
[0018]
进一步,所述地轨架两端设有限位块,所述限位块用于限制安装板在导轨上运行范围,以及所述驱动机构为对称设置于安装板上的驱动机构。
[0019]
进一步,所述导轨为双直线导轨,所述双直线导轨平行设置于地轨架上,所述安装包两端分别设置有底座锁紧装置,所述底座锁紧装置分别通过气缸进行锁紧控制。
[0020]
本实用新型还提供了一种采用具有锁紧功能的底座来设置的工业机器人,包括工业机器人,所述工业机器人设置于具有锁紧功能的底座上。
[0021]
本实用新型的有益效果在于:
[0022]
本实用新型提供的具有锁紧功能的底座,该底座的锁紧装置可通过控制电子调压阀,从而控制气缸压力,通过调节连接在活塞杆和直线轴承上的锁紧板位置,来实现底座处于可运动或锁定的状态。同时,还可根据工业机器人实际的负荷情况、打磨压力、整个工业机器人系统的振动情况来调节气缸压力,实现锁紧力的自动调节,以适应系统工作状态的变化,保证锁紧效果。因此,本实用新型提供具有锁定功能的机器人底座具自动化程度高、操作容易、方便高效、经济实用且适用范围广的特点,能有效提高工业机器人工作状态下的稳定性。
[0023]
本实用新型的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本实用新型的实践中得到教导。本实用新型的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0024]
为了使本实用新型的目的、技术方案和有益效果更加清楚,本实用新型提供如下附图进行说明:
[0025]
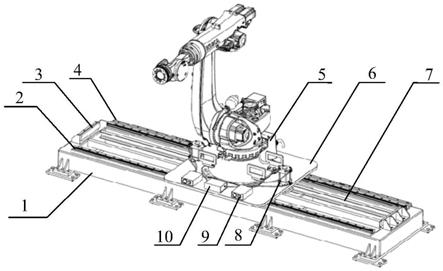
图1为具有锁紧功能的工业机器人底座的整体结构示意图。
[0026]
图2为锁紧装置处于锁定状态时锁定板位置示意图。
[0027]
标记说明:
[0028]
1—地轨架,2—直线导轨,3—限位块,4—运动齿条,5—工业机器人,6—机器人安装板,7—槽钢,8—锁紧气缸,9—电子调压阀,10—控制电路,11—直线轴承,12—锁紧板,13—气缸活塞杆,14—安装螺帽,15—直线轴承轴承套,16—底座移动驱动电机。
具体实施方式
[0029]
下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好的理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
[0030]
实施例1
[0031]
如图1所示,本实施例提供的具有锁紧功能的底座,包括地轨架、导轨、安装板、运动控制装置、锁紧力信息采集单元和底座锁紧装置;
[0032]
所述导轨设置于地轨架上,所述安装板设置于导轨上,所述安装板在运动控制装置的作用下实现与导轨滑动配合,以适于设置于安装板上的设备能沿导轨方向移动;
[0033]
所述底座锁紧装置设置于安装板和地轨架之间;
[0034]
所述锁紧力信息采集单元用于获取设置于安装板上的加工设备的工作状态信号,并将工作状态信号输入到底座锁紧装置中;
[0035]
所述底座锁紧装置通过工作状态信号在安装板和地轨架之间产生相互作用锁紧力,并通过锁紧力将安装板锁紧于地轨架上。
[0036]
本实施例提供的地轨架通过螺钉紧密固定在安装面上,导轨为直线导轨,为双直线导轨,所述双直线导轨平行设置于地轨架上,两根直线导轨固定安装在地轨架上。安装板下方通过螺钉与导轨滑块相连,滑块沿直线导轨方向带动安装板沿直线导轨滑动。
[0037]
本实施例提供的底座锁紧装置包括固定部、锁紧板和驱动机构;所述固定部沿安装板移动方向设置于地轨架上,所述锁紧板设置于安装板上,所述驱动机构接收所述锁紧力信息采集单元采集到的工作状态信号,以适于所述锁紧板在驱动机构的作用下与固定部之间产生对应的锁紧力,从而实现锁紧功能。安装板的两端分别安装两个锁紧装置,锁紧装置通过气缸进行锁紧控制。
[0038]
本实施例提供的驱动机构包括锁紧气缸、电子调压阀和控制电路;所述锁紧气缸设置于安装板上,所述锁紧气缸与电子调压阀连接,所述控制电路与电子调压阀连接,所述控制电路用于接收所述锁紧力信息采集单元采集到的工作状态信号,以适于所述控制电路根据工作状态信号对锁紧气缸产生对应的气缸压力,所述锁紧气缸在电子调压阀的控制下,通过锁紧气缸活塞杆的伸缩使得锁紧板与固定部之间产生相互作用,从而调节锁紧板与固定部之间的锁紧力。锁紧气缸分别位于机器人安装板前方和后方中间位置,通过锁紧螺钉固定在机器人安装板上。两个锁紧气缸的电子调压阀分布在机器人安装板上方一侧,分别用于控制前后两个锁紧气缸。锁紧装置中的控制电路分布正在电子调压阀同侧,用于控制电子调压阀工作。
[0039]
本实施例提供的锁紧力信息采集单元为设置于地轨架上的用于采集安装板振动信号的振动位移传感器。
[0040]
本实施例提供的固定部为设置于地轨架上的相互平行的槽钢,所述槽钢固定在地轨架两端的横梁上,所述槽钢间的间距与锁紧板配合,以保证锁紧板与槽钢之间接触。
[0041]
本实施例的槽钢为左右两根,通过螺钉紧密固定在地轨架中间横梁上,采用平行安装方式。槽钢间的间距与锁紧气缸下方的锁紧板尺寸相配合,以保证锁紧板上方与槽钢内侧上方紧密接触。
[0042]
本实施例提供的运动控制装置包括齿轮、齿条和驱动电机;所述齿条设置于地轨架上,所述驱动电机设置于安装板上,所述驱动电机通过齿轮与齿条啮合,从而带动安装板运动。
[0043]
本实施例提供的底座还包括直线轴承,所述直线轴承沿锁紧气缸的活塞杆方向设置,所述直线轴承一端通过轴套固定在安装板上,所述直线轴承另一端与锁紧板固定连接。
[0044]
本实施例的锁紧装置中锁紧气缸两侧安装有两根直线轴承,直线轴承轴套固定在机器人安装板上。直线轴承与气缸活塞杆下方穿过锁紧板,并通过螺帽与锁紧板紧密固定。
[0045]
本实施例提供的地轨架两端设有限位块,所述限位块用于限制安装板在导轨上运行范围,以及所述驱动机构为对称设置于安装板上的驱动机构。
[0046]
本实施例提供的导轨为双直线导轨,所述双直线导轨平行设置于地轨架上,所述安装包两端分别设置有底座锁紧装置,所述底座锁紧装置分别通过气缸进行锁紧控制。
[0047]
所述安装板两端分别设置有底座锁紧装置,所述底座锁紧装置分别通过气缸进行锁紧控制。
[0048]
实施例2
[0049]
本实施例提供的工业机器人,的通过采用上述具有锁紧功能的底座来设置,将需要使用的工业机器人设置于具有锁紧功能的底座上。
[0050]
本实施例提供的工业机器人可以采用打磨机器人、气刨机器人等,
[0051]
本实施例提供的底座上的锁紧装置采取如下工作方式:
[0052]
当机器人需要在导轨上运动时,系统控制锁紧机构中的电子调压阀,通过控制气缸推出锁紧板,使锁紧板与槽钢分离,解除底座锁定,机器人在导轨驱动电机的控制下沿直线导轨运动。
[0053]
当机器人运动到定位点时,系统控制锁紧机构中的电子调压阀,通过控制气缸上拉锁紧板,使锁紧板与槽钢紧密接触,此时底座锁定,机器人开始进行相关作业。
[0054]
该底座具有通过控制器输出信号进行气压控制,配置合适的气缸进行机构锁紧的功能,并能够根据工业机器人实际负荷情况和打磨工具的打磨压力进行锁紧力配置,保证机器人对锁紧刚度的要求。同时,通过在装置上配置振动位移传感器,根据系统的振动情况,通过电子调压器控制锁紧机构的锁紧力,以适应不同情况下的锁紧需求,具体实现过程如下:
[0055]
1)控制器通过对位移传感器输出的距离变化量进行数据分析,当变化距离超过设定上限阈值时,表明系统的锁紧力不能满足当前机器人负荷压力的需求;
[0056]
2)控制器根据预先设定的调节关系,计算出当前需要的气体锁紧压力,通过电子调压阀改变气压,加大系统的锁紧力;
[0057]
本实施例提供的调节关系可以预先根据实际情况进行试验,将采集到的数据结合实际要求进行分析,从而得到具体的调节关系,然后将其输入到控制器中存储,当现场采集到的振动信号输入后,与存储的调节关系进行对比,从而得到相匹配的锁紧力所需要的气体压力信号,通过电子调压阀来改变气缸活塞杆的伸缩情况。
[0058]
3)同时当系统检测到位移传感器的距离变化小于下限阈值时,表示锁紧机构锁紧力过大,可以通过电子调压阀进行锁紧力的减小设定;
[0059]
4)系统循环检测位移传感器的变化,实现对锁紧力的动态调节,保证系统既有一定的刚度,也有一定的柔性,延迟使用寿命。
[0060]
以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1