模块化鼻口咽拭子采样机器人的制作方法
[0001]
本实用新型涉及医疗机器人领域,特别涉及一种模块化鼻口咽拭子采样机器人。
背景技术:
[0002]
鼻咽拭子是生物样本采集的主要手段,在采样的过程中,医务人员存在被感染的风险,而且由于采样过程不规范,长时间的核酸检测工作以及高温的天气都会使得医护人员过度劳累,影响医护人员的身体以及采样效果。
[0003]
机器人技术应用于鼻咽拭子采样有望克服上述问题,在常态化防控阶段,采集人数众多,对采样的效率也提出了比较高要求。为了达到与医护人员相同甚至超越医护人员的采样效果,需要充分考虑隔离防护、样本采集、样本保存、样本转运等各个环节。现有一些采样设备以及器具,并未从采样的全流程实现医护人员与生物样本的彻底隔离,也难以保证拭子免受污染。迫切需要满足常态化防控需求的、适用于规模化鼻咽拭子样本采集的装备。
技术实现要素:
[0004]
针对上述问题,本实用新型的目的在于提供一种模块化鼻口咽拭子采样机器人。
[0005]
为了实现上述目的,本实用新型采用以下技术方案:
[0006]
一种模块化鼻口咽拭子采样机器人,包括操作平台及设置于所述操作平台上的采样机械臂、隔离套安装工位、拭子准备工位、拭子掰断装瓶工位、试管转运工位、隔离套拆卸工位、采样窗口模块及信息录入模块;其中信息录入模块用于记录和存储患者的身份信息及鼻咽样本检测信息;
[0007]
所述拭子准备工位用于剥离拭子外侧的包装袋;所述采样机械臂的执行末端设有采样工具,所述采样工具用于拭子的拾取和释放;所述隔离套安装工位用于在采样工具的外侧安装隔离套;所述采样窗口模块用于采样机械臂对受试者进行鼻咽拭子样本采集;所述拭子掰断装瓶工位用于将已采样的拭子装入试管后掰断;所述试管转运工位用于空置或装有鼻咽拭子样本的试管的转运;所述隔离套拆卸工位用于拆卸采样工具外侧的隔离套。
[0008]
所述采样工具包括外壳及设置所述外壳内的拭子夹持装置、采样力控装置、气动夹爪ⅰ及转接件ⅰ,其中转接件ⅰ与所述采样机械臂连接;所述转接件ⅰ上设置采样力控装置、气动夹爪ⅰ及口腔识别相机,口腔识别相机位于外壳的外侧;
[0009]
所述拭子夹持装置包括右侧开合件、左侧开合件及两个夹头,其中右侧开合件和左侧开合件通过铰接轴铰接在所述采样力控装置的两侧,所述铰接轴上套设有复位弹簧,所述右侧开合件和左侧开合件在复位弹簧的弹力作用下处于闭合状态;
[0010]
两个夹头连接在气动夹爪ⅰ的输出端,并且分别位于右侧开合件和左侧开合件的外侧;所述气动夹爪ⅰ驱动两个夹头闭合,进而两个夹头推动右侧开合件和左侧开合件张开。
[0011]
所述采样力控装置包括前盖、外层滑动件、力传感器、中间支撑件、套筒、弹簧及支
撑件ⅰ,其中支撑件ⅰ与所述转接件ⅰ连接,力传感器的一端与支撑件ⅰ连接,另一端与中间支撑件连接;
[0012]
所述中间支撑件为中空结构,该腔体内容置有套筒和弹簧;所述外层滑动件可沿轴向滑动地套设于所述中间支撑件的外侧;所述前盖设置于所述外层滑动件的端部,并且与所述弹簧抵接;所述外层滑动件通过前盖和所述中间支撑件上设有的轴肩轴向限位;
[0013]
所述铰接轴设置于所述外层滑动件的底部。
[0014]
所述采样机械臂包括底盘、立柱、机械臂前端法兰、机械臂底座法兰、六自由度机械臂、升降立柱、rgb-d相机及广角相机,其中底盘与所述操作平台滑动连接,立柱的下端与底盘连接,上端设有机械臂底座法兰;六自由度机械臂设置于机械臂底座法兰上,并且执行末端设有机械臂前端法兰,所述采样工具设置于机械臂前端法兰上;升降立柱设置于立柱上,rgb-d相机和广角相机设置于升降立柱顶端。
[0015]
所述隔离套安装工位包括安装框架、隔离套卡扣、卡扣盒、活动底板、顶升气缸及卡扣释放机构,其中安装框架上沿周向设有多个卡扣盒,各卡扣盒内均设置有卡扣释放机构及位于卡扣释放机构上方的多个隔离套卡扣;所述活动底板设置与所述卡扣盒的下方,并且与所述卡扣释放机构连接;所述顶升气缸设置于安装框架上,并且输出端与活动底板连接;
[0016]
所述卡扣释放机构包括竖直顶杆、弯曲顶杆、活动块、卡扣定位弹簧及拉杆,所述卡扣盒的一侧沿竖直方向设有滑槽,所述滑槽的上端设有卡扣释放口;所述活动块与滑槽滑动连接,所述活动块用于支撑多个隔离套卡扣;所述卡扣盒的内壁上沿竖直方向设有导向槽,所述竖直顶杆和弯曲顶杆分别与导向槽滑动配合,并且竖直顶杆位于弯曲顶杆的外侧;所述竖直顶杆和弯曲顶杆的下端通过拉杆与活动底板连接,所述竖直顶杆用于限制隔离套卡扣由卡扣释放口脱出;所述弯曲顶杆用于压紧除了位于最上方以外的隔离套卡扣及所述活动块;
[0017]
所述卡扣定位弹簧容置于所述卡扣盒内,并且下端与所述卡扣盒抵接,上端与所述活动块抵接,所述卡扣定位弹簧使位于最上层的隔离套卡扣位于卡扣释放口内。
[0018]
所述拭子准备工位包括拭子盒、二维移动平台、拭子吸盘、气动剪刀、气动夹爪ⅱ、升降气动夹爪、支架及升降气动滑台,其中拭子吸盘设置于二维移动平台,用于拾取拭子盒内的拭子;气动剪刀、气动夹爪ⅱ及升降气动滑台由上至下依次设置于支架上,升降气动夹爪设置于升降气动滑台上;
[0019]
所述气动剪刀用于剪开拭子外侧的包装袋;
[0020]
所述气动夹爪ⅱ的内侧设有凹槽,所述气动夹爪ⅱ用于夹紧拭子外侧的包装袋;
[0021]
所述升降气动夹爪用于夹紧拭子及外侧包装袋;所述升降气动滑台驱动升降气动夹爪向上移动,升降气动夹爪带动拭子及外侧包装袋一同向上运动,从而使拭子由外侧包装袋中伸出。
[0022]
所述拭子掰断装瓶工位包括气动夹紧机构、试管底座及固定底板,其中固定底板与所述操作平台连接;气动夹紧机构和试管底座设置于固定底板上,试管底座用于放置试管;所述试管底座的侧部设有开口,所述气动夹紧机构的执行端从该开口伸入,并且对试管进行把持。
[0023]
所述试管转运工位包括四自由度转运机械臂、试管夹持机构、安装底座及试管架,
其中安装底座设置于所述操作平台上;四自由度转运机械臂设置于安装底座上,并且执行末端与试管夹持机构连接;试管架设置于所述操作平台上设有的隔离箱中;所述四自由度转运机械臂用于空试管的放置和样本的收集。
[0024]
所述隔离套拆卸工位包括废弃隔离套收集箱及设置于废弃隔离套收集箱两侧的至少两组吸盘机构;
[0025]
所述吸盘机构包括负压吸盘、吸盘支撑杆及气动滑台,其中气动滑台设置于所述操作平台上,吸盘支撑杆的一端与气动滑台连接,另一端与负压吸盘连接;所述负压吸盘吸附隔离套后,通过气动滑台向后运动,从而使隔离套脱离所述采样工具。
[0026]
所述采样窗口模块包括采样窗口、隔离板、显示屏、下巴托、支撑件ⅱ、转接件ⅱ及升降气缸,其中升降气缸设置于所述操作平台上,并且输出端通过转接件ⅱ与支撑件ⅱ连接,支撑件ⅱ伸出采样窗口的外侧;下巴托设置于支撑件ⅱ上;显示屏通过支架与转接件ⅱ连接。
[0027]
本实用新型的优点与积极效果为:
[0028]
本实用新型通过自动化的采样流程衔接装置的设计,能够实现采样过程相对于医护人员的隔离防护,避免受试者之间的交叉感染,保证采样的质量。
[0029]
本实用新型在采样流程衔接上模拟了人工采样流程,并且多流程可以并行开展,缩短了采样时间,提高了采样效率。
[0030]
本实用新型采用了多采样窗口的环形布置形式,调度试管的机械臂在多个采样工位之间共用,减小了生产成本,同时缩小了占用空间。
[0031]
本实用新型将整体安装于移动平台上,可以实现多个人的同时采样,车载形式也有利于流动检测,大大增加了本实用新型的实用性。
[0032]
本实用新型可将整体安装于移动平台上,通过模块组合可以实现多人同时采样,车载形式也有利于流动检测,大大增加了本实用新型的实用性。
[0033]
本实用新型通过视觉识别口腔高度,实现自动调整下巴托高度,增加了采样过程中的舒适性与稳定性,提高采样效率。
附图说明
[0034]
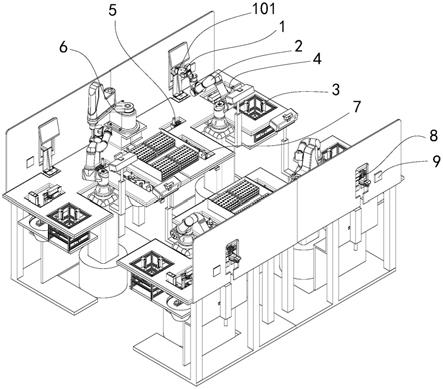
图1为本实用新型模块化鼻口咽拭子采样机器人的立体图;
[0035]
图2为本实用新型模块化鼻口咽拭子采样机器人的俯视图;
[0036]
图3为本实用新型中采样工具的结构示意图;
[0037]
图4为本实用新型中拭子夹持装置的结构示意图;
[0038]
图5为本实用新型中采样力控装置的结构示意图;
[0039]
图6为本实用新型中拭子夹持装置和采样力控装置的连接示意图;
[0040]
图7为本实用新型中采样机械臂的结构示意图;
[0041]
图8为本实用新型中隔离套安装工位的结构示意图;
[0042]
图9为本实用新型中卡扣释放机构的结构示意图;
[0043]
图10为本实用新型中卡扣盒的结构示意图;
[0044]
图11为本实用新型中拭子准备工位的结构示意图;
[0045]
图12为本实用新型中拭子掰断装瓶工位的结构示意图;
1037与转接件ⅰ107连接,力传感器1033的一端与支撑件ⅰ1037连接,另一端与中间支撑件1034连接;中间支撑件1034 为中空结构,该腔体内容置有套筒1035和弹簧1036;外层滑动件1032可沿轴向滑动地套设于中间支撑件1034的外侧;前盖1031设置于外层滑动件1032 的端部,并且与弹簧1036抵接;外层滑动件1032通过前盖1031和中间支撑件1034上设有的轴肩轴向限位。
[0055]
如图4、图5所示,本实用新型的实施例中,拭子夹持装置102包括右侧开合件1021、左侧开合件1022及两个夹头1023,其中右侧开合件1021和左侧开合件1022通过铰接轴铰接在外层滑动件1032的底部两侧,铰接轴上套设有复位弹簧1038,右侧开合件1021和左侧开合件1022在复位弹簧1038的弹力作用下处于闭合状态;两个夹头1023连接在气动夹爪ⅰ104的输出端,并且分别位于右侧开合件1021和左侧开合件1022的外侧;气动夹爪ⅰ104驱动两个夹头1023闭合,进而两个夹头1023推动右侧开合件1021和左侧开合件1022的下端使其转动,使右侧开合件1021和左侧开合件1022的上端张开,实现释放动作。
[0056]
采样工具1通过口腔识别相机106实现口腔位置识别,通过气动夹爪
ⅰꢀ
104可以驱动拭子夹持装置102完成开合动作,从而实现拭子101的抓取和放下。
[0057]
如图7所示,本实用新型的实施例中,采样机械臂2包括底盘201、立柱 202、机械臂前端法兰203、机械臂底座法兰204、六自由度机械臂205、升降立柱206、rgb-d相机207及广角相机208,其中底盘201与操作平台滑动连接,立柱202的下端与底盘201连接,上端设有机械臂底座法兰204;六自由度机械臂205设置于机械臂底座法兰204上,并且执行末端设有机械臂前端法兰203,采样工具1的转接件ⅰ107与机械臂前端法兰203连接;升降立柱 206设置于立柱202的后端上,rgb-d相机207和广角相机208设置于升降立柱206顶端,rgb-d相机207与广角相机208相固定,通过升降立柱206实现两个相机的上下平移。
[0058]
如图8所示,本实用新型的实施例中,隔离套安装工位3包括安装框架 301、隔离套卡扣302、卡扣盒303、活动底板304、顶升气缸305及卡扣释放机构,其中安装框架301上沿周向设有多个卡扣盒303,各卡扣盒303内均设置有卡扣释放机构及位于卡扣释放机构上方的多个隔离套卡扣302;顶升气缸 305设置于安装框架301上,并且输出端与活动底板304连接,活动底板304 与卡扣释放机构连接。
[0059]
如图9-10所示,本实用新型的实施例中,卡扣释放机构包括竖直顶杆 3031、弯曲顶杆3033、活动块3034、卡扣定位弹簧3035及拉杆3036,其中卡扣盒303的一侧沿竖直方向设有滑槽3032,滑槽3032的上端设有卡扣释放口3038;活动块3034与滑槽3032滑动连接,活动块3034用于支撑多个隔离套卡扣302;卡扣盒303的内壁上沿竖直方向设有导向槽,竖直顶杆3031和弯曲顶杆3033分别与导向槽滑动配合,并且竖直顶杆3031位于弯曲顶杆3033 的外侧;竖直顶杆3031和弯曲顶杆3033的下端与拉杆3036连接,拉杆3036 与活动底板304连接,竖直顶杆3031用于限制隔离套卡扣302由卡扣释放口 3038脱出;弯曲顶杆3033用于压紧除了位于最上方以外的隔离套卡扣302及活动块3034。卡扣定位弹簧3035容置于卡扣盒303内,并且下端与卡扣盒 303抵接,上端与活动块3034抵接,卡扣定位弹簧3035使位于最上层的隔离套卡扣302位于卡扣释放口3038内。卡扣盒303的上端设有卡扣外壳3037,卡扣外壳3037上设有t型槽口,用于隔离套卡扣302的进口。
[0060]
本实施例中,安装框架301是由铝型材组成,四个卡扣盒303通过螺栓固定于安装框架301上。隔离套四个角通过隔离套卡扣302固定,隔离套卡扣302装载于卡扣盒303中。在
使用时,需要手动将多个隔离套卡扣302由卡扣外壳3037上的t型槽口竖直推入卡扣盒303中,此时卡扣定位弹簧3035 对活动块3034提供持续的向上的推力,使隔离套卡扣3032位于指定的通道中。此时,竖直顶杆3031处于伸出状态,隔离套卡扣3032受到竖直顶杆3031 的限位,因而无法与卡扣盒脱离。
[0061]
隔离套安装工位3工作时,顶升气缸305驱动活动底板304向下运动,从而通过拉杆3036拉动竖直顶杆3031和弯曲顶杆3033均向下运动,使竖直顶杆3031消除对位于最上层的隔离套卡扣302的限制,从而释放卡扣盒303 中位于最上层的隔离套卡扣302,使其脱离卡扣盒303,完成整体隔离套的脱离。此时弯曲顶杆3033压紧除位于最上层以外的隔离套卡扣302和活动块 3034向下运动,防止其余的隔离套卡扣302由卡扣释放口3038中脱出。上方的活隔离套卡扣302脱离后,下方的隔离套卡扣302在卡扣定位弹簧3035的作用下,达到卡扣释放口3038的位置,从而实现隔离套卡扣302的连续释放。
[0062]
如图11所示,本实用新型的实施例中,拭子准备工位4包括拭子盒401、二维移动平台、拭子吸盘402、气动剪刀405、气动夹爪ⅱ406、升降气动夹爪407、支架408及升降气动滑台409,其中拭子吸盘402设置于二维移动平台,用于拾取拭子盒401内的拭子101;气动剪刀405、气动夹爪ⅱ406及升降气动滑台409由上至下依次设置于支架408上,升降气动夹爪407设置于升降气动滑台409上;气动剪刀405用于剪开拭子101外侧的包装袋;气动夹爪ⅱ406的内侧设有凹槽,气动夹爪ⅱ406用于夹紧拭子101外侧的包装袋,此时因气动夹爪ⅱ406内侧的凹槽不会夹紧包装袋内的拭子101;升降气动夹爪407用于夹紧拭子101及外侧包装袋,升降气动夹爪407的内侧面为平面,所以能同时夹紧拭子101及外侧包装袋;升降气动滑台409驱动升降气动夹爪407向上移动,升降气动夹爪407带动拭子101及外侧包装袋一同向上运动;因此时位于上方的气动夹爪ⅱ406夹紧包装袋,所以升降气动夹爪407带动拭子101及外侧包装袋一同向上运动时,使拭子101由外侧包装袋中伸出。
[0063]
本实施例中,二维移动平台包括横向气动滑台404及设置于横向气动滑台404上的纵向气动滑台403;拭子吸盘402设置于纵向气动滑台403上。
[0064]
如图12所示,本实用新型的实施例中,拭子掰断装瓶工位5包括气动夹紧机构502、试管底座503及固定底板504,其中固定底板504与操作平台连接;气动夹紧机构502和试管底座503设置于固定底板504上,试管底座503 用于放置试管501;试管底座503的侧部设有开口,气动夹紧机构502的执行端从该开口伸入,并且对试管501进行把持。当采样工具1与采样机械臂2 达到指定位置时,与拭子掰断装瓶工位5配合实现拭子101的掰断功能。
[0065]
如图13所示,本实用新型的实施例中,试管转运工位6包括四自由度转运机械臂601、试管夹持机构602、安装底座603及试管架604,其中安装底座603设置于操作平台上;四自由度转运机械臂601设置于安装底座603上,并且执行末端与试管夹持机构602连接;试管架604设置于操作平台上设有的隔离箱中;四自由度转运机械臂601用于空试管的放置和样本的收集。具体地,隔离箱由隔离板605围合而成。通过四自由度转运机械臂601实现空试管的放置与样本的收集。
[0066]
如图14所示,本实用新型的实施例中,隔离套拆卸工位7包括废弃隔离套收集箱704及设置于废弃隔离套收集箱704两侧的至少两组吸盘机构;本实施例中,废弃隔离套收集箱704通过螺栓固定在操作平台上,废弃隔离套收集箱704的四周设有四组吸盘机构。
[0067]
具体地,吸盘机构包括负压吸盘701、吸盘支撑杆702及气动滑台703,其中气动滑
台703设置于操作平台上,吸盘支撑杆702的一端与气动滑台703 连接,另一端与负压吸盘701以粘结形式连接;负压吸盘701吸附隔离套后,通过气动滑台703向后运动,从而使隔离套脱离采样工具1,并将隔离套丢弃至废弃隔离套收集箱704中。
[0068]
如图15所示,本实用新型的实施例中,采样窗口模块8包括采样窗口、隔离板801、显示屏802、下巴托803、支撑件ⅱ804、转接件ⅱ805及升降气缸806,其中升降气缸806设置于操作平台上,并且输出端通过转接件ⅱ805 与支撑件ⅱ804连接,支撑件ⅱ804伸出采样窗口的外侧;下巴托803设置于支撑件ⅱ804上;显示屏802通过支架与转接件ⅱ805连接,从而实现下巴托 803与显示屏802同步调整高低。
[0069]
本实用新型的实施例中,本实用新型的整体结构安装于移动平台上。操作平台开启后,两侧分别有两个采样窗口,这两个窗口采用对称设计,可以同时提供四个人进行鼻咽拭子采样。操作平台中间设置有工作空间,可用于医护人员更换试管、装载拭子和维修设备。该机器人平台以采样机械臂2为中心,隔离套安装工位3、拭子准备工位4、拭子掰断装瓶工位5、试管转运工位6、隔离套拆卸工位7按顺序成环形布置,其中每两个试管转运工位共用一台四自由度转运机械臂,符合采样流程的前提下,能够提高采样效率。采样机械臂2的底盘为可移动式,到达指定位置后固定。通过前述各模块的组合可实现规模化鼻咽拭子采样,多个鼻咽拭子机器人平台组合可以满足不同规模下采样的要求,信息录入模块9包含身份证识别设备与数据处理系统。
[0070]
以上所述仅为本实用新型的实施方式,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1