机器人关节驱动用动力传输系统的制作方法
1.本发明涉及手术用机器人,更详细地,涉及机器人关节驱动用动力传输系统。
背景技术:
2.近来,随着产业领域、医疗领域等多个领域中的机器人的应用范围不断扩大,研发了各种驱动方式。除在机器人关节直接附着促动器之外,还通过带、链、线等的各种方法传输动力。
3.在这种驱动方式中,最简单的方法为在连杆结构直接附着促动器的方法,但具有促动器本身的重量非常重的缺点。
4.为了弥补其,提出了将促动器固定在地面且利用柔韧的两个缆线传输力的双输入缆线驱动方法。
5.但是,如上所述的现有的缆线驱动方法为仅在两个马达均拉拽缆线的情况下驱动的方式,因此,为了向对象传输驱动力,一个马达需提供可同时拉拽作为两个缆线的主缆线及从缆线的力。
6.由此,当驱动时,各个马达需通过非常大的力拉拽主缆线,因此需要具有大输出的马达,具有精准度降低的问题。
7.同时,在现有的驱动方式的情况下,向主缆线施加通过马达直接拉拽的力,因此并没有大问题,但通过在主缆线施加的力驱动的从缆线并不插入于鞘,露出在外部的部分松动而弯曲或产生大的间隙,从而具有降低精准度的问题。
8.因此,需要从缆线不会松动而弯曲且可减少间隙的方案。
9.并且,这种缆线通过身体部位插入,因此为了预防患者感染,以不能回收利用的一次性产品使用。缆线在使用之后从驱动装置分离后,需更换为新的缆线,但是具有需将缆线再次结合在驱动装置的不便。
技术实现要素:
10.技术问题
11.本发明用于解决如上所述的问题,其目的在于,提供如下的机器人关节驱动用动力传输系统:控制从缆线的移动,可增加动力传输量并提高控制精准度。
12.并且,本发明提供便于更换一次性缆线的机器人关节驱动用匣盒型动力传输系统。
13.本发明的目的并不局限于以上所提及的目的,普通技术人员可通过以下记载明确理解未提及的其他目的。
14.技术方案
15.为了实现上述目的,本发明的实施例可提供机器人关节驱动用动力传输系统,为用于驱动机器人的关节的系统,其包括:驱动部,包括第一驱动单元及第二驱动单元;第一传力部,包括第一鞘及第一线,上述第一鞘具有规定长度、柔韧性且由中空形形成,上述第
一线插入于上述第一鞘、一端固定在上述机器人的关节且另一端与上述第一驱动单元相连接;以及第二传力部,包括第二鞘及第二线,上述第二鞘具有规定长度、柔韧性且由中空形形成,上述第二线插入于上述第二鞘、一端固定在上述机器人的关节且另一端与上述第二驱动单元相连接,在上述第一驱动单元沿着第一方向向上述第一线侧提供力的情况下,上述第二驱动单元沿着作为上述第一方向的相反方向的第二方向向上述第二线侧提供力。
16.在上述第一驱动单元沿着拉拽上述第一线的方向向上述第一线施加力的情况下,上述第二驱动单元可沿着推动上述第二线的方向向上述第二线提供力,在上述第二驱动单元沿着拉拽上述第二线的方向向上述第二线施加力的情况下,上述第一驱动单元可沿着推动上述第一线的方向向上述第一线提供力。
17.在上述第一驱动单元沿着拉拽上述第一线的方向向上述第一线提供力且上述第二驱动单元沿着推动上述第二线的方向向上述第二线提供力的情况下,可基于在上述第二线与第二鞘之间产生的摩擦力调整上述第二驱动单元向上述第二线侧提供的力的大小。
18.上述第二驱动单元向上述第二线侧提供的最大力的大小可以和在上述第二线与第二鞘之间产生的摩擦力的大小相同。
19.在上述第一驱动单元沿着拉拽上述第一线的方向向上述第一线提供力且上述第二驱动单元沿着推动上述第二线的方向向上述第二线提供力的情况下,上述第一驱动单元向上述第一线侧提供的力的大小可以与将在上述第一线与第一鞘之间产生的摩擦力和活动上述机器人关节本身的力相加的大小相同。
20.在上述第一驱动单元沿着拉拽上述第一线的方向向上述第一线提供力且上述第二驱动单元沿着推动上述第二线的方向向上述第二线提供力的情况下,从上述第一鞘的端部朝向外侧引出的第一线的引出长度可相对长于从上述第二鞘的端部朝向上述第二鞘的内部侧引入的第二线的引入长度。
21.在上述第一驱动单元沿着拉拽上述第一线的方向向上述第一线提供力且上述第二驱动单元沿着推动上述第二线的方向向上述第二线提供力的情况下,上述第二鞘的总长度中的包括引入上述第二线的上述第二鞘的端部的一部分长度可以处于与上述第二线一同防止游动的状态。
22.并且,本发明可提供机器人关节驱动用动力传输方法,为用于驱动机器人的关节的缆线动力传输方法,其包括:第一驱动单元,一端固定在机器人关节,与插入于第一鞘的第一线的另一端部相连接来提供沿着上述第一鞘的长度方向拉拽或推动上述第一线的力;以及第二驱动单元,一端固定在上述机器人关节,与插入于第二鞘的第二线的另一端部相连接来提供沿着上述第二鞘的长度方向拉拽或推动上述第二线的力,在上述第一驱动单元沿着第一方向向上述第一线侧提供力的情况下,上述第二驱动单元沿着作为上述第一方向的相反方向的第二方向向上述第二线侧提供力。
23.上述机器人关节驱动用动力传输系统还可包括:主体部;第一弹性部,其一端固定在上述主体部,其另一端固定在上述第一驱动单元,包围上述第一线的另一端;以及第二弹性部,其一端固定在上述主体部,其另一端固定在上述第二驱动单元,包围上述第二线的另一端,上述第一驱动单元和上述第二驱动单元可进行线性运动。
24.上述机器人关节驱动用动力传输系统还可包括配置在上述主体部的控制部,上述控制部能够以上述第一驱动单元沿着第一方向向上述第一线提供力的方式控制上述第一
驱动单元,能够以上述第二驱动单元沿着作为上述第一方向的相反方向的第二方向向上述第二线提供力的方式控制上述第二驱动单元。
25.在上述主体部的一侧可形成使上述第一线贯通的第一线孔以及使上述第二线贯通的第二线孔。
26.上述第一驱动单元可包括:第一驱动马达,用于产生驱动力;以及第一移动部,接收上述第一驱动马达的驱动力来进行线性运动,上述第二驱动单元可包括:第二驱动马达,用于产生驱动力;以及第二移动部,接收上述第二驱动马达的驱动力来进行线性运动。
27.上述主体部可包括:第一导向孔,用于引导上述第一移动部;以及第二导向孔,用于引导上述第二移动部。
28.上述第一弹性部和上述第二弹性部可沿着上述第一方向接收力来收缩并可沿着上述第二方向接收力来伸展。
29.并且,本发明实施例的另一机器人关节驱动用匣盒型动力传输系统为用于驱动机器人的关节的动力传输系统,其可包括:外壳;第一驱动部,配置在上述外壳的内部,进行线性运动;以及匣盒,插入于上述外壳的内部,上述匣盒包括:壳体;移动部,收容在上述壳体,与上述第一驱动部相连接来进行线性运动;传力部,包括鞘及线,上述鞘具有规定长度、柔韧性且由中空形形成,上述线插入于上述鞘、其一端固定在上述机器人的关节、其另一端固定在上述移动部并贯通上述壳体;以及弹性部,其一端固定在上述壳体,其另一端固定在上述移动部,包围上述线,上述匣盒可以以能够拆装的方式与上述外壳相结合。
30.本发明还可包括第二驱动部,以使上述第一驱动部与上述移动部相连接或从上述移动部分离上述第一驱动部的方式使上述第一驱动部移动。
31.上述第一驱动部可包括:驱动主体部,能够在上述外壳的内部移动;第一马达,配置在上述驱动主体部;以及拆装部,与上述第一马达相连接,通过上述第一马达的驱动力进行线性运动,以能够拆装的方式与上述移动部相结合。
32.上述第二驱动部可包括:第二马达,配置在上述外壳;以及连接部,与上述第二马达相连接,通过上述第二马达的驱动力进行线性运动。
33.上述拆装部可包括从上述拆装部的外侧面突出的突起,上述移动部可具有使上述拆装部的上述突起插入的拆装槽。
34.上述匣盒可具有使上述传力部通过的孔。
35.上述壳体可具有引导上述移动部的移动的导向孔。
36.上述弹性部可沿着第一方向伸展,可沿着作为上述第一方向的相反方向的上述第二方向收缩。
37.发明的效果
38.根据本发明的实施例,驱动单元向从缆线侧提供驱动力,来抵消在从缆线中产生的摩擦力,由此即使向主缆线侧提供小的驱动力,也可体现与以往相同水平以上的动力传输量。
39.并且,根据本发明的实施例,可通过抵消在从缆线侧产生的摩擦力来减少或防止从缆线中的间隙,由此具有可提高控制精准度的优点。
40.并且,包括缆线的匣盒以能够拆装的方式与外壳相结合,因此容易更换在手术中使用的缆线。
41.并且,当将现有的缆线与驱动装置相连接时,存在感染的风险,与之相比,通过将匣盒插入于外壳来驱动缆线,因此手术用机器人驱动装置的卫生管理得以改善。
附图说明
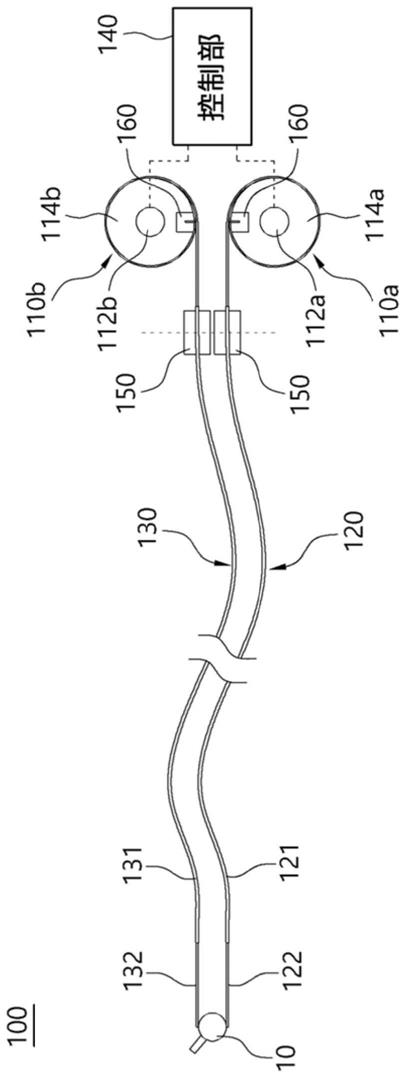
42.图1为示出本发明一实施例的机器人关节驱动用动力传输系统的简图。
43.图2为图1的操作状态图。
44.图3为图2中的“a”部分的放大图。
45.图4为示出图1中的从驱动单元向线侧推动的力过大的情况的操作状态图。
46.图5为示出本发明一实施例的机器人关节驱动用动力传输系统中可用作驱动单元的机器人关节驱动用缆线驱动装置的图。
47.图6为示出图5中的主要结构分离的状态的图。
48.图7为从另一方向观察图6的图。
49.图8为示出图6中的线卷绕在辊的状态的部分剖视图。
50.图9为示出图8中的马达拉拽线的情况的操作状态图。
51.图10为示出图8中的马达推动线的情况的操作状态图。
52.图11为示出将本发明一实施例的机器人关节驱动用动力传输系统应用于内窥镜手术系统的状态的简图。
53.图12为简要示出本发明再一实施例的机器人关节驱动用动力传输系统的图。
54.图13为图12的操作状态图。
55.图14为示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的立体图。
56.图15为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结构的立体图。
57.图16为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结构的主视图。
58.图17为简要示出本发明另一实施例的机器人关节驱动用动力传输系统的结构的俯视图。
59.图18为简要示出本发明另一实施例的机器人关节驱动用动力传输系统的结构的侧视图。
60.图19为示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的匣盒的立体图。
61.图20为示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的匣盒的侧视图。
62.图21为简要示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的匣盒的结构的图。
63.图22为示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的第一驱动部的侧视图。
64.附图标记的说明
65.100:机器人关节驱动用动力传输系统
66.110a:第一驱动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112a:第一驱动马达
67.114a:第一辊
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110b:第二驱动单元
68.112b:第二驱动马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114b:第二辊
69.120:第一传力部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121:第一鞘
70.122:第一线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130:第二传力部
71.131:第二鞘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132:第二线
72.140:控制部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150:鞘架
73.160:线夹
74.200、200a、200b:机器人关节驱动用缆线驱动装置
75.210:本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212:配置孔
76.220:驱动马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230:驱动辊
77.232:第一收容槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
234:放置槽
78.240:负荷测量部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
242:第二收容槽
79.250:盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251:盖面
80.252:导向槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
252a:第一导向槽
81.252b:第二导向槽
82.300:机器人关节驱动用动力传输系统
83.310:主体部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
361:第一驱动单元
84.371:第二驱动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:第一传力部
85.321:第一鞘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322:第一线
86.330:第二传力部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331:第二鞘
87.332:第二线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
340:第一弹性部
88.350:第二弹性部
89.400:机器人关节驱动用匣盒型动力传输系统
90.410:外壳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420:第一驱动部
91.430:匣盒
具体实施方式
92.以下,参照附图更详细地说明各种实施例。本发明的实施例可进行各种变形。可在附图中描述特定实施例并可在详细说明中进行详细说明。但是,在附图中公开的特定实施例仅用于便于理解各种实施例。因此,技术思想并不局限于在附图中公开的特定实施例,包含在本发明的思想及技术范围中包含的所有等同技术方案或代替技术方案。
93.包括第一、第二等的序数的术语可用于说明各种结构要素,这种结构要素并不限定于如上所述的术语。如上所述的术语用于将一个结构要素区别于另一个结构要素。
94.在本发明的实施例中,需要理解的是,“包括”或“具有”等的术语用于指定在本发明的实施例中记载的特征、数字、步骤、动作、结构要素、部件或它们的组合的存在,而不是事先排除一个或一个以上的其他特征或数字、步骤、动作、结构要素、部件或它们的组合的存在或附加可能性。当提及一结构要素与另一结构要素“相连接”或“相联接”时,可理解为与另一结构要素直接连接或直接联接,还可理解为在中间存在其他结构要素。相反,当提及
一结构要素与另一结构要素“直接连接”或“直接联接”时,应理解为中间不存在其他结构要素。
95.另一方面,在本发明的实施例中使用的结构要素的“模块”或“部”执行至少一个功能或动作。并且,“模块”或“部”可通过硬件、软件或硬件和软件的组合执行功能或动作。并且,除需在特定硬件执行或在至少一个处理器执行的“模块”或“部”之外的“多个模块”或“多个部”可集成为至少一个模块。除非在文脉上另行定义,否则单数的表达包括复数的表达。
96.除此之外,当说明本发明的实施例时,当判断为与相关的公知功能或结构有关的具体说明不必要地混淆本发明的主旨时,将缩略或省略对于其的详细说明。
97.本发明一实施例的机器人关节驱动用动力传输系统100用于实现双输入(double input)鞘
‑
腱动力传输机构,如图1及图2所示,包括驱动部、第一传力部120以及第二传力部130。
98.即,在本发明一实施例的机器人关节驱动用动力传输系统100中,上述驱动部可包括第一驱动单元110a以及第二驱动单元110b,上述第一驱动单元110a与上述第一传力部120直接连接来向上述第一传力部120提供驱动力,另外,上述第二驱动单元110b可与上述第二传力部130直接连接来向上述第二传力部130提供驱动力。
99.在本发明中,上述第一传力部120及第二传力部130可采用如下的鞘
‑
腱机构:腱以能够在鞘的内部沿着长度方向进行移动的方式插入于上述鞘的内部。
100.即,上述第一传力部120可包括:第一鞘121,具有规定长度、柔韧性,由中空形形成;以及第一线122,插入于上述第一鞘121。在如上所述的情况下,上述第一线122能够以两端部露出在上述第一鞘121的外部的方式插入于上述第一鞘121,露出于外部的第一线122的两端部中的一端部可固定在控制对象10且另一端部可固定在上述第一驱动单元110a。
101.相同地,上述第二传力部130可包括:第二鞘131,具有规定长度、柔韧性,由中空形形成;以及第二线132,插入于上述第二鞘131。在如上所述的情况下,上述第二线132能够以两端部露出在上述第二鞘131的外部的方式插入于上述第二鞘131,露出于外部的第二线132的两端部中的一端部可固定在上述控制对象10且另一端部可固定在上述第二驱动单元110b。
102.并且,上述第一驱动单元110a可包括第一驱动马达112a以及以能够旋转的方式与上述第一驱动马达112a相结合的第一辊114a,上述第一线122的一端部可固定结合在上述第一辊114a。
103.相似地,上述第二驱动单元110b可包括第二驱动马达112b以及以能够旋转的方式与上述第二驱动马达112b相结合的第二辊114b,上述第二线132的一端部可固定结合在上述第二辊114b。
104.在本发明中,上述控制对象10可以为机器人的驱动关节,上述机器人的驱动关节可以为用于在机械手臂中驱动机器人的手指或机器人的手腕的驱动关节。并且,上述第一鞘121及第二鞘131可以为以在承受施加于上述第一线122及第二线132的张力的同时保持整体形状且具有柔韧性的方式由金属材质形成的线圈形状的管。但是,上述第一鞘121及第二鞘131的形状及材质并不限定于此,可应用在公知的鞘
‑
腱机构中作为鞘采用的所有形状及材质。
105.同时,本发明一实施例的机器人关节驱动用动力传输系统100还可包括用于驱动上述第一驱动单元110a及第二驱动单元110b的整体动作的控制部140,上述控制部140可基于使用人员的输入信号控制上述第一驱动单元110a及第二驱动单元110b的驱动。同时,上述控制部140可基于使用人员的输入信号控制从上述第一驱动单元110a向上述第一线122提供的力的大小和从上述第二驱动单元110b向上述第二线132提供的力的大小。
106.如上所述,在本发明一实施例的机器人关节驱动用动力传输系统100中,第一线122的端部连接于第一驱动单元110a的第一传力部120与第二线132的端部连接于第二驱动单元110b的第二传力部130可通过控制对象10相互连接,在通过上述控制部140的控制从上述第一驱动单元110a向上述第一线122侧提供驱动力或从上述第二驱动单元110b向上述第二线132侧提供驱动力的情况下,上述第一线122及第二线132可在第一鞘121及第二鞘131的内部沿着长度方向移动。由此,上述控制对象10可旋转或移动至使用人员所期望的位置。
107.在此情况下,与现有的双输入鞘
‑
腱机构不同地,在本发明一实施例的机器人关节驱动用动力传输系统100中,上述第一驱动单元110a及第二驱动单元110b可同时向上述第一传力部120及第二传力部130侧提供驱动力,可通过上述控制部140控制从上述第一驱动单元110a及第二驱动单元110b向上述第一传力部120及第二传力部130侧提供的驱动力的大小。
108.即,如图2及图3所示,在本发明一实施例的机器人关节驱动用动力传输系统100中,在上述第一驱动单元110a沿着第一方向向上述第一线122侧提供力的情况下,上述第二驱动单元110b可沿着作为上述第一方向的相反方向的第二方向向上述第二线132侧提供力。
109.相似地,在本发明一实施例的机器人关节驱动用动力传输系统100中,在上述第二驱动单元110b沿着第一方向向上述第二线132侧提供力的情况下,上述第一驱动单元110a可沿着作为上述第一方向的相反方向的第二方向向上述第一线122侧提供力。
110.在本发明中,上述第一方向定义为上述第一驱动单元110a拉拽第一线122的力的方向或上述第二驱动单元110b拉拽第二线132的力的方向,上述第二方向定义为上述第一驱动单元110a推动第一线122的力的方向或上述第二驱动单元110b推动第二线132的力的方向。
111.同时,上述第一线122及第二线132可根据从上述第一驱动单元110a及第二驱动单元110b提供的力的方向相互切换主缆线的作用和从缆线的作用。
112.即,在上述第一线122沿着第一方向移动且上述第二线132沿着第二方向移动的情况下,上述第一线122可起到主缆线的作用,上述第二线132可起到从缆线的作用。相反地,在上述第一线122沿着第二方向移动且上述第二线132沿着第一方向移动的情况下,上述第二线132可起到主缆线的作用,上述第一线122可起到从缆线的作用。
113.具体地,在上述第一驱动单元110a沿着第一方向向上述第一线122提供力t1的情况下,上述第二驱动单元110b可沿着第二方向向上述第二线132提供力t2。由此,如图2所示,可使与上述第一线122的端部及第二线132的端部分别连接的控制对象10朝向上述第一方向侧旋转。
114.与其相反地,在上述第二驱动单元110b向上述第二线132提供第一方向上的力的情况下,上述第一驱动单元110a可向上述第一线122提供第二方向上的力。由此,可使与上
述第一线122的端部及第二线132的端部分别连接的控制对象10朝向上述第二方向侧旋转。
115.即,在本发明一实施例的机器人关节驱动用动力传输系统100中,在向第一线122及第二线132中执行主缆线的作用的任一个线侧提供拉拽线的第一方向上的力t1的情况下,可向执行从缆线的作用的剩余线侧提供推动线的第二方向上的力t2。
116.换言之,在本发明一实施例的机器人关节驱动用动力传输系统100中,在通过驱动单元向执行主缆线的作用的线侧提供拉拽的力t1的同时通过驱动单元向执行从缆线的作用的线侧提供主动推动的力t2,由此在执行从缆线的作用的线在鞘的内部移动的过程中,可补偿因与鞘相接触而产生的摩擦力t3。
117.由此,在本发明一实施例的机器人关节驱动用动力传输系统100中,即使以小的力拉拽执行主缆线的作用的线,也可将上述控制对象10的移动变更至所期望的位置。
118.以下,为了便于说明,以上述第一线122执行控制控制对象10的移动的主缆线的作用且上述第二线132执行从缆线的作用的过程为一例进行说明,在上述第二线132执行控制控制对象10的移动的主缆线的作用且上述第一线122执行从缆线的作用的相反情况下,仅相互转换提供至上述第一线122的力的方向与提供至上述第二线132的力的方向及大小,但数值相同,因此将省略详细说明。
119.具体地,如图2及图3所示,在上述第一驱动单元110a向上述第一线122提供第一方向上的力t1的情况下,上述第二驱动单元110b可向上述第二线132侧提供第二方向上的力t2。
120.在如上所述的情况下,可基于上述第二线132沿着第二鞘131的长度方向移动至上述控制对象10侧时的在上述第二线132与第二鞘131之间产生的摩擦力t3设置上述第二驱动单元110b向上述第二线132侧提供的第二方向上的力t2的大小。
121.优选地,可与上述第二线132沿着第二鞘131的长度方向移动至上述控制对象10侧时的在上述第二线132与第二鞘131之间产生的摩擦力t3相同的大小提供上述第二驱动单元110b向上述第二线132侧提供的第二方向上的力t2的大小。
122.由此,若上述第一驱动单元110a向上述第一线122侧提供的第一方向上的力t1的大小与将上述第一线122沿着第一鞘121的长度方向移动至上述第一驱动单元110a侧时的在上述第一线122与第一鞘121之间产生的摩擦力t11和用于移动上述控制对象10本身的力t12的大小相加的力相同,则上述控制对象10可变更至工作人员所期望的位置。
123.在此情况下,上述第二驱动单元110b向上述第二线132侧提供的第二方向上的力t2的最大大小可以与上述第二线132沿着第二鞘131的长度方向移动至上述控制对象10侧时在上述第二线132与第二鞘131之间产生的摩擦力t3的大小相同。并且,上述第二驱动单元110b向上述第二线132侧提供的第二方向上的力t2的最大大小可小于上述第一驱动单元110a向上述第一线122侧提供的第一方向上的力t1的大小。
124.原因在于,如图4所示,若上述第二驱动单元110b向上述第二线132侧提供的第二方向上的力t2的最大大小大于在上述第二线132与第二鞘131之间产生的摩擦力t3,则连接于上述控制对象10且从上述第二鞘131的端部露出的第二线132部分可松动而弯曲,在去除拉拽上述第一线122的力t1的情况下,在上述第二线132侧可产生间隙。
125.另外,在本发明一实施例的机器人关节驱动用动力传输系统100中,在执行从缆线的作用的线侧提供推动的力的情况下,上述鞘的端部可固定在上述驱动单元110a、110b侧
来防止上述线下垂并顺畅地移动至鞘的内部。
126.如一例,在上述第一驱动单元110a向上述第一线122提供第一方向上的力且上述第二驱动单元110b向上述第二线132侧提供第二方向上的力的情况下,上述第二鞘131可处于总长度中的包括引入上述第二线132的端部的一部分长度b与上述第二线132一同防止游动的状态。
127.作为非限制性一例,上述第二鞘131能够以总长度中的包括引入上述第二线132的端部的一部分长度b插入于在上述第二驱动单元110b侧沿着与长度方向平行的方向形成的导向槽252的状态固定,上述导向槽252能够以一同放置上述第二鞘131的一部分长度b和露出于外部的第二线132的一部分的方式形成(参照图8)。
128.由此,在上述第二驱动单元110b向上述第二线132侧提供第二方向上的力的情况下,从上述第二鞘131的端部露出于外部的第二线132的一部分长度可直接沿着上述导向槽252移动至第二鞘131侧,由此可事先防止第二线132在上述第二鞘131的端部侧下垂。
129.如上所述,在本发明一实施例的机器人关节驱动用动力传输系统100中,通过驱动单元向执行从缆线的作用的线侧提供主动推动线的驱动力来抵消在执行从缆线的作用的线与鞘之间产生的摩擦力,由此,即使向执行主缆线的作用的线侧提供小的驱动力,也可实现与以往相同水平以上的动力传输量。
130.并且,根据本发明,具有如下的优点,即,通过抵消在从缆线侧产生的摩擦力来减少或防止从缆线中的间隙,由此可提高控制精准度。
131.另外,在本发明一实施例的机器人关节驱动用动力传输系统100中,第一驱动单元110a及第二驱动单元110b可由机器人关节驱动用缆线驱动装置200体现。
132.如一例,上述第一驱动单元110a及第二驱动单元110b可以为在图5至图7所示的机器人关节驱动用缆线驱动装置200,在固定结合有鞘121、131的鞘架150与固定有线122、132的端部的线夹160相固定的状态下,上述机器人关节驱动用缆线驱动装置200通过驱动马达220使驱动辊230旋转,由此可提供将上述线122、132拉拽至鞘121、131的外部或者推动至上述鞘121、131的内部的力。
133.在本实施例中,上述鞘121、131可以为如上所述的第一鞘121或第二鞘131,上述线122、132可以为如上所述的第一线122或第二线132。
134.并且,在如上所述的机器人关节驱动用动力传输系统100中,构成第一驱动单元110a的第一驱动马达112a及第一辊114a可以为后述的驱动马达220及驱动辊230。而且,在如上所述的机器人关节驱动用动力传输系统100中,构成第二驱动单元110b的第二驱动马达112b及第二辊114b也可以为后述的驱动马达220及驱动辊230。
135.在此情况下,上述鞘121、131能够以两端部侧从上述鞘架150突出规定长度的方式固定在上述鞘架150,上述线122、132在一端部固定在控制对象10的状态下通过固定在上述鞘架150的鞘121、131后,处于另一端部固定在上述线夹160的状态。
136.在如上所述的状态下,上述鞘架150及上述线夹160可安装于上述机器人关节驱动用缆线驱动装置200。
137.为此,本发明一实施例的机器人关节驱动用缆线驱动装置200可包括本体210、驱动马达220、驱动辊230以及负荷测量部240。
138.具体地,上述本体210可执行使上述驱动马达220、驱动辊230及负荷测量部240安
装的固定物的作用。
139.如一例,在上述本体210的一侧面可固定上述驱动马达220,可形成具有与上述驱动辊230相对应的形状的配置孔212来配置上述驱动辊230。
140.并且,上述驱动辊230可通过从上述驱动马达220提供的驱动力旋转,以能够旋转的方式配置于上述配置孔212,在上述驱动辊230的一侧可形成用于收容上述线夹160的第一收容槽232。
141.在如上所述的情况下,上述驱动马达220可包括减速器,上述驱动辊230以能够旋转的方式与上述减速器侧相结合。
142.由此,如图9及图10所示,在上述线夹160安装于上述第一收容槽232的状态下,当上述驱动辊230沿着一方向或相反方向转动时,固定有上述线122、132的端部的线夹160也通过驱动辊230转动,由此可拉拽或推动上述线122、132。
143.在此情况下,上述配置孔212的一侧能够以开口状形成,使得上述第一收容槽232向外部露出。由此,在上述第一收容槽232以位于以开口状形成的配置孔212侧的方式配置的情况下,上述线夹160可通过上述开口的部分容易安装于上述第一收容槽232侧。
144.并且,上述驱动辊230可形成有沿着周围方向朝向内侧引入的放置槽234来能够收容上述线122、132的厚度。由此,上述线122、132可在通过上述鞘121、131的总长度中的一部分的长度根据上述放置槽234卷绕在驱动辊230至少一次的状态下端部可固定在上述线夹160侧,由此,可通过旋转顺畅地向上述线122、132侧传输力。
145.同时,即使上述驱动辊230沿着一方向或相反方向转动来使上述线122、132从上述鞘121、131引出,也根据放置槽234引导上述线122、132来引导卷绕方向,由此可顺畅地向上述线122、132侧传输力。
146.其中,上述驱动马达220可通过控制部的控制正方向驱动或逆方向驱动,上述控制部可以为如上所述的控制部140。
147.上述负荷测量部240可固定设置在上述本体210的一侧,在一侧可形成用于收容上述鞘架150的第二收容槽242。即,在上述第二收容槽242能够以装拆的方式安装固定结合有上述鞘121、131的一部分长度的鞘架150。
148.其中,上述负荷测量部240可以为负荷传感器,上述第二收容槽242可直接形成在上述负荷传感器的一侧,还可形成于固定结合在上述负荷传感器的额外的部件。
149.如一例,上述负荷测量部240可配置在上述驱动辊230的一侧,来当鞘架150安装于上述第二收容槽242时,使得通过上述鞘121、131来露出于外部的线122、132以直线展开至上述线夹160侧。
150.由此,在上述负荷测量部240中,在上述第二收容槽242安装鞘架150且在上述第一收容槽232安装线夹160的状态下,当通过上述驱动辊230的转动使上述线夹160旋转来向上述线122、132提供力时,可测量施加于上述鞘架150的力,可通过施加于上述鞘架150的力测量上述鞘121、131的力。
151.在如上所述的情况下,根据作用和反作用的关系,施加于上述线122、132的力和施加于上述鞘121、131的力为相同的力,因此,可通过测量施加于上述鞘架150的力来容易测量施加于上述线122、132的力。
152.由此,基于施加于上述鞘架150的负荷的大小,可通过上述控制部140的控制准确
地控制通过上述驱动马达220提供至上述线122、132的力。
153.由此,在如上所述的机器人关节驱动用动力传输系统100中,可适当调节施加于执行主缆线的作用的线侧的拉拽的力的大小和施加于执行从缆线的作用的线侧的推动的力的大小,由此可准确地补偿在执行从缆线的作用的线与鞘之间产生的摩擦力。
154.在此情况下,本发明一实施例的机器人关节驱动用缆线驱动装置200可包括盖250,来在通过上述驱动马达220的驱动沿着作为将上述线122、132推动至鞘121、131的内部的方向的第二方向向上述线122、132侧施加力的情况下,使上述线122、132不被所施加的力弯曲且使上述线122、132准确地进入至鞘121、131的内部。
155.即,本发明一实施例的机器人关节驱动用缆线驱动装置200可包括盖250,在上述第一收容槽232及第二收容槽242分别安装线夹160及鞘架150且上述第一收容槽232位于配置孔212的开放的部分的初始状态下,上述盖250具有同时覆盖上述第一收容槽232及第二收容槽242的上部的盖面251。
156.由此,分别安装于上述第一收容槽232及第二收容槽242的线夹160及鞘架150被上述盖面251加压,从而可防止从上述第一收容槽232及第二收容槽242脱离。
157.如上所述的盖250能够以可拆装的方式与上述本体210相结合,一侧能够以转动的方式与上述本体210相结合。
158.在此情况下,如图7所示,上述盖面251可包括引入形成的导向槽252,在上述鞘架150安装于上述第二收容槽242的状态下,可同时放置从上述鞘架150朝向上述驱动辊230侧突出的鞘121、131的突出部分b和从上述鞘121、131的突出部分b的端部朝向外部露出的线122、132的一部分。
159.即,上述导向槽252可包括:第一导向槽252a,用于收容上述鞘121、131的突出部分b;以及第二导向槽252b,用于收容从上述鞘121、131的突出部分b的端部向外部露出的线122、132,上述第一导向槽252a与第二导向槽252b能够以相连接的方式形成。
160.同时,上述第一导向槽252a的底面和上述第二导向槽252b的底面能够以高度差面形成。
161.由此,如图8所示,在上述鞘架150安装于上述第二收容槽242的状态下,从上述鞘架150朝向上述驱动辊230侧突出的鞘121、131的突出部分b可与上述第一收容槽232的端部侧相连接。
162.因此,在本发明一实施例的机器人关节驱动用缆线驱动装置200中,即使通过上述驱动马达220的驱动沿着作为将上述线122、132推动至鞘121、131的内部的方向的第二方向向上述线122、132侧施加力,也可在上述线122、132的移动方向被上述第二导向槽252b限制的状态下,可通过放置于上述第一导向槽252a的鞘121、131的突出部分b的端部直接进入至上述鞘121、131的内部,由此即使沿着推动上述线122、132的方向施加力,也不被所施加的力弯曲并准确地进入至鞘121、131的内部。
163.由此,在本发明一实施例的机器人关节驱动用缆线驱动装置200中,即使通过上述驱动马达220的驱动沿着作为将上述线122、132推动至鞘121、131的内部的方向的第二方向向上述线122、132侧施加力,也可在上述线122、132进入至鞘121、131的内部的过程中,不发生如力的损失或线的弯曲的副作用,从而上述负荷测量部240可准确地测量施加于上述鞘架150的力。
164.如上所述,在本发明一实施例的机器人关节驱动用缆线驱动装置200中,在通过如上所述的结构使上述鞘架150安装于上述第二收容槽242且上述线夹160安装于上述第一收容槽232的状态下,当通过驱动马达220的驱动向线122、132侧提供拉拽的力时,也可准确地向线122、132侧施加推动的力。
165.由此,本发明一实施例的机器人关节驱动用缆线驱动装置200可以被采用为用于体现如上所述的机器人关节驱动用动力传输系统100的驱动单元110a、110b。
166.另外,如上所述的机器人关节驱动用动力传输系统100可构成内窥镜手术系统,上述机器人关节驱动用动力传输系统100的驱动单元可由如上所述的机器人关节驱动用缆线驱动装置200构成。
167.如一例,如图11所示,机器人关节驱动用动力传输系统100可包括:第一传力部120,包括第一驱动单元110a、第二驱动单元110b、第一鞘121及第一线122;以及第二传力部130,包括第二鞘131及第二线132,上述第一驱动单元110a及第二驱动单元110b可由如上所述的机器人关节驱动用缆线驱动装置200构成。
168.在如上所述的情况下,包括上述第一鞘121及第一线122的第一传力部120、包括上述第二鞘131及第二线132的第二传力部130可直接采用如上所述的结构,上述机器人关节驱动用缆线驱动装置200可直接采用如上所述的机器人关节驱动用缆线驱动装置200。因此,将省略对其的详细说明。
169.在此情况下,上述第一传力部120及第二传力部130可通过患者的口腔插入至插管到患者体内的保护管20的内部,上述第一线122可固定在线夹160侧,上述线夹160的一端与作为控制对象10的机器人的驱动关节相连接且另一端设置于第一机器人关节驱动用缆线驱动装置200a,上述第二线132可固定在线夹160侧,上述线夹160的一端可与机器人的驱动关节10相连接且另一端设置于第二机器人关节驱动用缆线驱动装置200b。其中,在作为上述控制对象10的机器人的驱动关节可固定内窥镜设备。
170.在如上所述的状态下,操作人员通过控制部140使上述第一机器人关节驱动用缆线驱动装置200a及第二机器人关节驱动用缆线驱动装置200b进行工作,可在拉拽上述第一线122的同时推动上述第二线132,或者可在拉拽上述第二线132的同时推动上述第一线122。
171.由此,作为上述控制对象10的机器人的驱动关节可准确地变更为操作人员所要的方向及位置,固定在上述控制对象10的内窥镜设备也可准确地变更为操作人员所要的方向及位置,由此可提高手术的准确度。
172.同时,上述线夹160及鞘架150以能够拆装的方式安装于上述第一收容槽232及第二收容槽242,由此在使用后,可与第一传力部120及第二传力部130一同简便去除并可替代为未使用产品,提供驱动力的第一机器人关节驱动用缆线驱动装置200a及第二机器人关节驱动用缆线驱动装置200b可简单地重复使用,无需担心污染。
173.另外,作为如上所述的机器人关节驱动用动力传输系统100或包括机器人关节驱动用缆线驱动装置200的机器人关节驱动用动力传输系统100的一适用例,例示了内窥镜手术系统,本发明并不限定于此,只要是执行抓握作业的机械手臂或用于驱动其的机器人的驱动关节,均可适用,可广泛应用于医疗用、家庭用、产业用等。
174.图12为简要示出本发明再一实施例的机器人关节驱动用动力传输系统的图,图13
为图12的操作状态图。
175.参照图12及图13,本发明再一实施例的机器人关节驱动用动力传输系统300用于体现双输入鞘
‑
腱动力传输机构,包括主体部310、包括第一驱动单元360及第二驱动单元370的驱动部、第一传力部320、第二传力部330、第一弹性部340以及第二弹性部350。
176.上述主体部310可收容上述第一驱动单元360、上述第二驱动单元370、上述第一弹性部340及上述第二弹性部350。上述主体部310可由塑料或金属材质制成,除此之外,可由具有刚性、耐腐蚀性的各种材质制成。
177.上述第一驱动单元360可配置在上述主体部310。上述第一驱动单元360可包括第一驱动马达361以及第一移动部362。
178.上述第一驱动马达361可安装于上述主体部310。上述第一驱动马达361可接收电源来产生驱动力。
179.上述第一移动部362可接收上述第一驱动马达361的驱动力来进行线性运动。例如,上述第一移动部362可根据上述第一驱动马达361的驱动力沿着上述第一方向
①
移动或者沿着作为上述第一方向
①
的相反方向的第二方向
②
移动。
180.根据本发明的一实施例,上述主体部310可具有引导上述第一移动部362的第一导向孔312。上述第一移动部362可沿着上述第一导向孔312以上述第一方向
①
或上述第二方向
②
移动。
181.上述第二驱动单元370可配置在上述主体部310。上述第二驱动单元370可包括第二驱动马达371以及第二移动部372。
182.上述第二驱动马达371可安装于上述主体部310。上述第二驱动马达371可接收电源来产生驱动力。
183.上述第二移动部372可接收上述第二驱动马达371的驱动力来进行线性运动。例如,上述第二移动部372可根据上述第二驱动马达371的驱动力沿着上述第一方向
①
移动或者沿着作为上述第一方向
①
的相反方向的第二方向
②
移动。
184.根据本发明的一实施例,上述主体部310可具有引导上述第二移动部372的第二导向孔313。上述第二导向孔313可与上述第一导向孔312平行地形成。上述第二移动部372可沿着上述第二导向孔313以上述第一方向
①
或上述第二方向
②
移动。
185.上述第一传力部320及上述第二传力部330可采用插入于上述鞘的内部的鞘
‑
腱机构来使得腱在鞘的内部沿着长度方向移动。
186.上述第一传力部320可包括第一鞘321以及第一线322。上述第一鞘321具有规定长度、柔韧性,可由中空形形成。上述第一线322可插入于上述第一鞘321。上述第一线322能够以使上述第一线322的两端部露出于上述第一鞘321的外部的方式插入于上述第一鞘321。上述第一线322的两端部中的一端可固定在机器人的关节10。上述第一线322的两端部中的另一端贯通上述主体部310的一侧311,并可固定在上述第一驱动单元360的上述第一移动部362。
187.上述第二传力部330可包括第二鞘331以及第二线332。上述第二鞘331具有规定长度、柔韧性,可由中空形形成。上述第二线332可插入于上述第二鞘331。上述第二线332能够以使上述第二线332的两端部露出于上述第二鞘331的外部的方式插入于上述第二鞘331。上述第二线332的两端部中的一端可固定在机器人的关节10。上述第二线332的两端部中的
另一端贯通上述主体部310的一侧311,并可固定在上述第二驱动单元370的上述第二移动部372。
188.根据本发明的再一实施例,在上述主体部310的一侧311可形成使上述第一线322贯通的第一线孔和使上述第二线332贯通的第二线孔。
189.根据本发明的再一实施例,上述机器人的关节10可以为用于在机械手臂中驱动机器人的手指或机器人的手腕的驱动关节。
190.并且,上述第一鞘321及第二鞘331可以为以在承受施加于上述第一线322及第二线332的张力的同时保持整体形状且具有柔韧性的金属材质形成的线圈形状的管。但是,上述第一鞘321及第二鞘331的形状及材质并不限定于此,可应用在公知的鞘
‑
腱机构中作为鞘才用的所有形状及材质。
191.并且,本发明再一实施例的机器人关节驱动用动力传输系统300还可包括用于控制上述第一驱动单元360及第二驱动单元370的整体动作的控制部,上述控制部可基于使用人员的输入信号控制上述第一驱动单元360及第二驱动单元370的驱动。并且,上述控制部可基于使用人员的输入信号控制从上述第一驱动单元360向上述第一线322提供的力的大小和从上述第二驱动单元370向上述第二线332提供的力的大小。上述控制部能够以上述第一驱动单元360向上述第一线322提供第一方向
①
上的力的方式控制上述第一驱动单元360,且以上述第二驱动单元370向上述第二线332提供第二方向
②
的力的方式控制上述第二驱动单元370。
192.并且,上述第一传力部320与第二传力部330可通过机器人的关节10相互连接,在通过上述控制部的控制从上述第一驱动单元360向上述第一线322提供驱动力或者从上述第二驱动单元370向上述第二线332提供驱动力的情况下,上述第一线322及第二线332可在第一鞘321及第二鞘331的内部沿着长度方向移动。由此,上述机器人的关节10可旋转或移动至使用人员所期望的位置。
193.根据本发明的再一实施例,与现有的双输入鞘
‑
腱机构不同地,上述第一驱动单元360及第二驱动单元370可同时向上述第一传力部320及第二传力部330提供驱动力,可通过上述控制部控制从上述第一驱动单元360及第二驱动单元370向上述第一传力部320及第二传力部330提供的驱动力的大小。
194.如图13所示,在本发明再一实施例的机器人关节驱动用动力传输系统300中,在上述第一驱动单元360沿着上述第一方向
①
向上述第一线322提供力的情况下,上述第二驱动单元370可沿着上述第二方向
②
向上述第二线332提供力。相似地,在本发明再一实施例的机器人关节驱动用动力传输系统300中,在上述第二驱动单元370沿着上述第一方向
①
向上述第二线332提供力的情况下,上述第一驱动单元360可沿着上述第二方向
②
向上述第一线322提供力。
195.并且,上述第一线122及第二线132可根据从上述第一驱动单元360及上述第二驱动单元370提供的力的方向相互切换主缆线的作用和从缆线的作用。即,在上述第一线322沿着上述第一方向
①
移动第一长度a且上述第二线332沿着第二方向
②
移动上述第一长度a的情况下,上述第一线322可起到主缆线的作用,上述第二线332可起到从缆线的作用。相反地,在上述第一线322沿着第二方向
②
移动上述第一长度a且上述第二线332沿着第一方向
①
移动上述第一长度a的情况下,上述第二线332可起到主缆线的作用,上述第一线322可起
到从缆线的作用。
196.在本发明再一实施例的机器人关节驱动用动力传输系统300中,在通过驱动单元向执行主缆线的作用的线侧提供拉拽的力的同时通过驱动单元向执行从缆线的作用的线侧提供主动推动的力,由此起到从缆线的作用的线可在鞘的内部移动的过程中补偿因与鞘相接触而产生的摩擦力。由此,在本发明再一实施例的机器人关节驱动用动力传输系统300中,即使以小的力拉拽执行主缆线的作用的线,也可将上述机器人的关节10的移动变更至所期望的位置。例如,若上述第一驱动单元360向上述第一线322提供的上述第二方向
②
上的力的大小与将上述第一线322沿着第一鞘321的长度方向通过上述第一驱动单元360移动时在上述第一线322与第一鞘321之间产生的摩擦力和用于移动上述机器人的关节10的力t12的大小相加的力相同,则上述机器人的关节10可变更至工作人员所期望的位置。
197.如上所述,在本发明再一实施例的机器人关节驱动用动力传输系统300中,通过驱动单元向执行从缆线的作用的线侧提供主动推动线的驱动力来抵消在执行从缆线的作用的线与鞘之间产生的摩擦力,由此,即使向执行主缆线的作用的线侧提供小的驱动力,也可体现与以往相同水平以上的动力传输量。
198.并且,根据本发明具有如下的优点,即,通过抵消在从缆线侧产生的摩擦力来减少或防止从缆线中的间隙,由此可提高控制精准度。
199.上述第一弹性部340可包围上述第一线322的另一端。例如,上述第一线322的另一端是指在上述第一线322的整个部分中配置于上述主体部310的内部的部分。上述第一弹性部340的一端固定在上述主体部310的内侧面,上述第一弹性部340的另一端可固定在上述第一驱动单元360的上述第一移动部362。上述第一弹性部340能够以管形态形成。上述第一弹性部340可由整体上保持管形态且具有弹力的各种材质形成。
200.随着上述第一移动部362沿着上述第一方向
①
移动,上述第一弹性部340可收缩,随着上述第一移动部362沿着上述第二方向
②
移动,上述第一弹性部340可伸展。即使上述第一线322通过上述第一移动部362沿着上述第一方向
①
或上述第二方向
②
移动,上述第一弹性部340也可保持包围上述第一线322的状态。由此,上述第一弹性部340可防止上述第一线322在上述主体部310的内部下垂。
201.上述第二弹性部350可包围配置在上述主体部310的内部的上述第二线332。上述第二弹性部350的一端固定在上述主体部310的内侧面,上述第二弹性部350的另一端可固定在上述第二驱动单元370的上述第二移动部372。上述第二弹性部350可由管形态形成。上述第二弹性部350可由整体上保持管形态且具有弹力的各种材质形成。并且,上述第二弹性部350可与上述第一弹性部340并排配置。
202.随着上述第二移动部372沿着上述第一方向
①
移动,上述第二弹性部350可收缩,随着上述第二移动部372沿着上述第二方向
②
移动,上述第二弹性部350可伸展。即使上述第二线332通过上述第二移动部372沿着上述第一方向
①
或上述第二方向
②
移动,上述第二弹性部350可保持包围上述第二线332的状态。由此,上述第二弹性部350可防止上述第二线332在上述主体部310的内部下垂。
203.图14为示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的立体图,图15为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结构的立体图,图16为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结
构的主视图,图17为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结构的俯视图,图18为简要示出本发明另一实施例的机器人关节驱动用匣盒型动力传输系统的结构的侧视图。
204.参照图14至图18,本发明另一实施例的机器人关节驱动用匣盒型动力传输系统400可包括外壳410、第一驱动部420以及匣盒430。
205.上述外壳410可收容上述第一驱动部420、上述匣盒430以及后述的第二驱动部440。上述外壳410可由塑料或金属材质形成。并且,上述外壳410并不限定于由塑料或金属材质形成,可由具有刚性、耐腐蚀性的各种材质形成。在上述外壳410的一侧411可形成用于使上述匣盒430插入于上述外壳410的内部的插入孔411a。并且,在上述外壳410的上述一侧411可配置用于显示上述机器人关节驱动用匣盒型动力传输系统400的状态的显示器。
206.上述第一驱动部420可配置于上述外壳410的内部。上述第一驱动部420可沿着上述第一方向
①
(参照图13)或上述第二方向
②
(参照图13)进行线性运动。上述第一驱动部420可由多个构成。上述多个第一驱动部420可包括与上述匣盒430的一侧面相向的上述多个第一驱动部中的一个421以及与上述匣盒430的另一侧面相向的上述多个第一驱动部中的另一个422。上述多个第一驱动部中的另一个422可隔着上述匣盒430与上述多个第一驱动部中的一个421对称来配置。上述多个第一驱动部中的一个421可以由4个构成,上述多个第一驱动部中的另一个422可由4个构成。但是,上述多个第一驱动部中的一个421和上述多个第一驱动部中的另一个422并不限定于由4个构成,可由如2个或6个的各种数量构成。之后参照附图说明上述第一驱动部420。
207.上述匣盒430可通过上述插入孔411a插入于上述外壳410的内部。上述匣盒430可包括用于体现双输入鞘
‑
腱动力传输机构的传力部439(参照图21)以及弹性部438。之后参照附图说明上述匣盒430。
208.上述匣盒430能够以拆装的方式与上述外壳410相结合。如上所述,上述匣盒430以能够拆装的方式与上述外壳410相结合,因此,在本发明实施例的手术用机器人驱动系统400中,改善用作消耗品的传力部439(参照图21)的更换便利性。
209.本发明另一实施例的机器人关节驱动用匣盒型动力传输系统400还可包括第二驱动部440。
210.上述第二驱动部440以能够使上述第一驱动部420与上述匣盒430相连接或从上述匣盒430分离上述第一驱动部420的方式沿着上述第三方向
③
或作为上述第三方向
③
的相反方向的第四方向
④
移动上述第一驱动部420。上述第三方向
③
可以为垂直于上述第一方向
①
的方向。上述第二驱动部440可由多个构成。上述多个第二驱动部440可由多个构成。上述多个第二驱动部440可包括隔着上述多个第一驱动部中的一个421配置在上述匣盒430的相对侧的上述多个第二驱动部中的一个441以及隔着上述多个第一驱动部中的另一个422配置在上述匣盒430的相对侧的上述多个第二驱动部中的另一个442。
211.上述多个第二驱动部中的一个441可包括第二马达441a以及连接部441b。上述第二马达441a可配置在上述外壳410的下面412。上述连接部441b与上述第二马达441a相连接,可通过上述第二马达441a的驱动力沿着上述第三方向
③
或上述第四方向
④
进行线性运动。上述连接部441b可与上述多个第一驱动部中的一个421相连接。
212.上述多个第二驱动部中的一个441可通过使上述多个第一驱动部中的一个421沿
着上述第四方向
④
移动来使上述多个第一驱动部中的一个421与上述匣盒430相连接。并且,上述多个第二驱动部中的一个441可通过使上述多个第一驱动部中的一个421沿着上述第三方向
③
移动来从上述匣盒430分离上述多个第一驱动部中的一个421。
213.上述多个第二驱动部中的另一个442可包括第二马达442a以及连接部442b。上述第二马达442a可配置于上述外壳410的下面412。上述连接部442b与上述第二马达442a相连接,可通过上述第二马达442a的驱动力沿着上述第三方向
③
或上述第四方向
④
进行线性运动。上述连接部442b可与上述多个第一驱动部中的另一个422相连接。
214.上述多个第二驱动部中的另一个442可通过使上述多个第一驱动部中的另一个422沿着上述第三方向
③
移动来使上述多个第一驱动部中的另一个422与上述匣盒430相连接。并且,上述多个第二驱动部中的另一个442可通过使上述多个第一驱动部中的另一个422沿着上述第四方向
④
移动来从上述匣盒430分离上述多个第一驱动部中的另一个422。
215.在上述匣盒430插入于上述外壳410或从上述外壳410分离上述匣盒430的过程中,上述第二驱动部440可控制上述第一驱动部420与上述匣盒430的连接与否。
216.根据本发明的另一实施例,可同时驱动上述多个第二驱动部中的一个441和上述多个第二驱动部中的另一个442。
217.图19为示出本发明还有一实施例的械关节驱动用匣盒型动力传输系统的匣盒的立体图,图20为示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的匣盒的侧视图,图21为简要示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的匣盒的结构的图,图22为示出本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的第一驱动部的侧视图。
218.参照图19至图22,本发明还有一实施例的机器人关节驱动缆线动力传输系统的上述匣盒430可包括壳体431、移动部435、436、437、传力部439以及弹性部438。
219.上述壳体431可收容上述移动部435、436、437、上述传力部439以及上述弹性部438。上述壳体431可由塑料或金属材质形成。并且,上述壳体431并不限定于由塑料或金属材质形成,可由具有刚性、耐腐蚀性的各种材质形成。上述壳体431可包括通过使用人员的手或机构抓握的把手部432。
220.上述壳体431可具有引导上述移动部435、436、437的移动的导向孔434。上述导向孔434能够以缝隙形态形成。上述导向孔434可由多个构成。上述多个导向孔434可并排形成。
221.上述移动部435、436、437可收容在上述壳体431。上述移动部435、436、437可与上述第一驱动部420相连接。上述移动部435、436、437可接收上述第一驱动部420的驱动力来沿着上述第一方向
①
或上述第二方向
②
进行线性运动。上述移动部435、436、437可通过上述导向孔434露出于上述壳体431的外部。上述移动部435、436、437可包括第一移动部435、第二移动部436以及第三移动部437。上述第一移动部435、上述第二移动部436及上述第三移动部437可并排排列。
222.上述传力部439可包括鞘439a和线439b。
223.上述鞘439a具有规定长度、柔韧性,可由中空形形成。上述鞘439a的一部分收容在上述壳体431,上述鞘439a的另一部分可露出于上述壳体431的外部。
224.并且,上述鞘439a可与前述的实施例的上述第一鞘321和上述第二鞘331相同或相
似。
225.上述线439b可插入于上述鞘439a。上述线439b的一端固定在机器人关节10(参照图12),上述线439b的另一端可固定在上述第一移动部435。上述线439b的另一端可通过上述第一移动部435的移动沿着上述第一方向
①
或上述第二方向
②
移动。
226.并且,上述线439b可与前述的实施例的上述第一线322和上述第二线332相同或相似。
227.上述弹性部438可收容在上述壳体431的内部。上述弹性部438的一端固定在上述壳体431,上述弹性部438的另一端可固定在上述第一移动部435。上述弹性部438可通过上述第一移动部435的移动沿着上述第一方向
①
伸展且沿着上述第二方向
②
收缩。
228.并且,根据本发明的还有一实施例,上述弹性部438可固定在上述第二移动部436及上述第三移动部437。并且,根据本发明的还有一实施例,上述弹性部438可贯通上述第二移动部436和上述第三移动部437。
229.并且,上述弹性部438可与前述的实施例的上述弹性部438相同或相似。
230.本发明还有一实施例的机器人关节驱动用匣盒型动力传输系统的上述第一驱动部421可包括驱动主体部421a、第一马达423以及拆装部425、426、427。
231.上述驱动主体部421a可通过上述第二驱动部440的驱动力在上述外壳410(图16)的内部沿着上述第三方向
③
或上述第四方向
④
移动。上述驱动主体部421a可与上述第二驱动部440的上述连接部441b(参照图17)相结合。
232.上述第一马达423可配置在上述驱动主体部421a。
233.上述拆装部425、426、427可配置在上述驱动主体部421a。上述拆装部425、426、427可与上述第一马达423相连接。上述拆装部425、426、427可通过上述第一马达423的驱动力沿着上述第一方向
①
或上述第二方向
②
进行线性运动。上述拆装部425、426、427能够以拆装的方式与上述移动部435、436、437相结合。
234.上述拆装部425、426、427可过包括从上述拆装部425、426、427的外侧面突出的突起425a、425b、426a、426b、427a、427b。并且,上述移动部435、436、437可包括使上述突起425a、425b、426a、426b、427a、427b插入的拆装槽435b、436b、437b。.
235.上述拆装部425、426、427可包括第一拆装部425、第二拆装部426以及第三拆装部427。上述第一拆装部425、上述第二拆装部426及上述第三拆装部427可并排排列。
236.随着上述第一拆装部425的突起425a、425b插入于上述第一移动部435的拆装槽435b或从上述第一移动部435的拆装槽435b分离上述第一拆装部425的突起425a、425b,上述第一拆装部425能够以拆装的方式与上述第一移动部435相结合。
237.随着上述第二拆装部426的突起426a、426b插入于上述第二移动部436的拆装槽436b或从上述第二移动部436的拆装槽436b分离上述第二拆装部426的突起426a、426b,上述第二拆装部426能够以拆装的方式与上述第二移动部436相结合。
238.随着上述第三拆装部427的突起427a、427b插入于上述第三移动部437的拆装槽437b或从上述第三移动部437的拆装槽437b分离上述第三拆装部427的突起427a、427b,上述第三拆装部427能够以拆装的方式与上述第三移动部437相结合。
239.并且,上述匣盒430还可包括第一固定部431b。上述第一固定部431b可通过形成在上述壳体431的侧面的固定孔431a露出于上述壳体431的侧面。并且,上述第一驱动部420可
包括第二固定部428。上述第二固定部428可包括固定突起428a、428b。并且,在上述第一固定部431b可形成与上述固定突起428a、428b相对应的固定槽。上述第二固定部428的固定突起428a、428b可插入于第一固定部431b的固定槽来使上述第一驱动部420与上述匣盒430坚固地结合。
240.上述拆装部425、426、427可接收上述第一马达423的驱动力来沿着上述第一方向
①
或上述第二方向
②
移动。上述移动部435、436、437与上述拆装部425、426、427相连接后,上述移动部435、436、437可与上述拆装部425、426、427一同沿着上述第一方向
①
或上述第二方向
②
移动。并且,上述线439b可与上述移动部435、436、437一同沿着上述第一方向
①
或上述第二方向
②
移动。与上述线439b相连接的上述机器人的关节10(参照图12)可通过上述线439b的移动驱动。
241.以上,对本发明的一实施例进行了说明,但本发明的思想并不局限于在本说明书中提出的实施例,理解本发明的思想的普通技术人员可在相同的思想范围内通过结构要素的附加、变更、删除、追加等容易提出其他实施例,这也包含在本发明的思想范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1