一种点焊机电极清洗装置的制作方法
[0001]
本实用新型涉及点焊机配套设施领域,特别是一种点焊机电极清洗装置。
背景技术:
[0002]
目前行业内对微型直流马达的点焊机电极的清洗都是采用纯手动请洁的方式,但是这种清洗方式,在生产过程中不仅员工的劳动强度高而且工作效率也低。这种作业方式已经不能完全满足生产日益增长的要求,所以有必要设计一种能够对点焊机电极进行清洗的装置。
技术实现要素:
[0003]
本实用新型的目的在于,提供一种点焊机电极清洗装置。本实用新型具有对点焊机电极的清洁效率高,清洁效果好的优点。
[0004]
本实用新型采用如下技术方案实现发明目的:
[0005]
一种点焊机电极清洗装置,包括上下移送机构,上下移送机构连接前后移送机构,前后移送机构连接电极清洗机构;所述上下移送机构包括气缸一;所述前后移送机构包括气缸二,气缸二连接气缸一;所述电极清洗机构包括l安装板,l安装板中设有电机,电机连接清洗部;所述l安装板连接气缸二。
[0006]
前述的点焊机电极清洗装置中,所述气缸一连接滑台一,滑台一连接安装杆。
[0007]
前述的点焊机电极清洗装置中,所述气缸二连接安装板,安装板与连接板一连接,连接板一活动连接滑台一。
[0008]
前述的点焊机电极清洗装置中,所述气缸二连接滑台二,滑台二活动连接l安装板。
[0009]
前述的点焊机电极清洗装置中,所述l安装板与连接板二连接,连接板二连接气缸二。
[0010]
本实用新型的有益效果:与现有技术相比,本实用新型通过机械代替人工作业,可实现对电焊机电极的清洗,通过在点焊机上增设的“电极清洗装置”的方式进行作业,本实用新型适合于微型直流马达的点焊机或同类型马达的点焊机,因每次清洁能同时清洁一个或n个电极,而清洁时间不变。本实用新型的作业方式具体是控制上下移动机构从上移到下,再控制前后移动机构移动到前面,电机开始工作清洁,工作完后电机停止,然后控制前后移动机构移动到后面,上下移动机构从下移回到上面,即完成一次清洗作业循环,等下一循环再继续作业。本实用新型对点焊机电极的清洁效果和人工作业相比,具有效率高,清洁效果好,能同时符合品质要求的优点。并本实用新型可自动清洁,能够降低一定的生产成本。
附图说明
[0011]
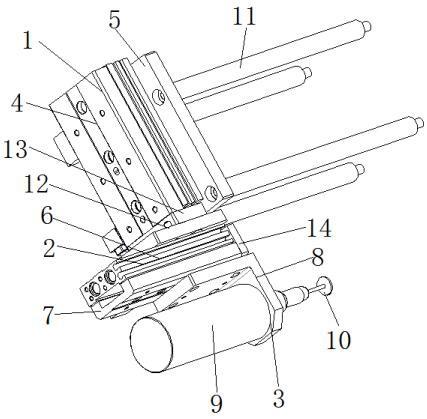
图1是本实用新型的结构示意图;
[0012]
图2是本实用新型在点焊机上的应用结构示意图。
[0013]
图3是图2中圆形区域的局部结构放大示意图。
[0014]
图4是本实用新型使用时的工作顺序和运动过程的结构示意图。
[0015]
附图1-3中的标记为:1-上下移动机构,2-前后移送机构,3-电极清洗机构,4-气缸一,5-滑台一,6-气缸二,7-滑台二,8-l安装板,9-电机,10-清洗部,11-安装杆,12-安装板,13-连接板一,14-连接板二,15-点焊机,16-控制系统机构。
[0016]
附图4中的标记和箭头的含义为:a
→
b-从上到下,c
→
d-从后到前,e-清洗部旋转,f
→
g-从前到后,h
→
i-从下到上。
具体实施方式
[0017]
下面结合附图和实施例对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。对于未特别注明的结构,均为本领域的现有技术。
[0018]
实施例。一种点焊机电极清洗装置,构成如图1所示,包括上下移送机构1,上下移送机构1连接前后移送机构2,前后移送机构2连接电极清洗机构3;所述上下移送机构1包括气缸一4;所述前后移送机构2包括气缸二6,气缸二6连接气缸一4;所述电极清洗机构3包括l安装板8,l安装板8中设有电机9,电机9连接清洗部10;所述l安装板8连接气缸二6。上下移送机构1和前后移送机构2各自送电极清洗机构3至指定清洗工位,电极清洗机构3完成清洗作业。
[0019]
所述气缸一4连接滑台一5,滑台一5连接安装杆11。本实用新型使用时,通过通过安装杆11安装在点焊机15上。安装示意图如图2-3所示。点焊机15上设有控制系统机构16,控制系统机构16,用于控制点焊机15,并用常规控制结构和方式控制本实用新型,即控制系统机构1可定时控制清洁时间,上下移送机构1和前后移送机构2中气缸活塞杆的伸缩,以及电极清洗机构4中电机的启停。同时,本实用新型不用控制系统机构16也能够作业,人工分别控制每个动作即可。
[0020]
所述气缸二6连接安装板12,安装板12与连接板一13连接,连接板一13活动连接滑台一5。连接板一13可在滑台一5上滑动。
[0021]
所述气缸二6连接滑台二7,滑台二7活动连接l安装板8。l安装板8可在滑台二7上滑动。
[0022]
所述l安装板8与连接板二14连接,连接板二14连接气缸二6。
[0023]
本实用新型的使用方法和工作原理:将本实用新型安装在点焊机上后,各部件的工作顺序如图4所示,顺序为从a开始,按字母顺序到i。具体是根据时间控制上下移动机构1从上移到下,再控制前后移动机构2移动到前面,电机9开始工作清洁,工作完后电机9停止,然后控制前后移动机构2移动到后面,上下移动机构1从下移回到上面,即完成一次清洗作业循环,等下一循环再继续作业。
[0024]
结合本实用新型的各部件进一步说明本实用新型的具体工作动作和原理。具体为:通过安装杆11连接电焊机,与安装杆11连接的滑台一5固定,启动上下移动机构1,气缸一4的活塞杆伸出,带动前后移送机构2和电极清洗机构3从上到下移动至工位,移动时连接板一13沿滑台一5滑动,安装板12带动前后移送机构2和电极清洗机构3运动。之后,启动前后移送机构2,气缸二6的活塞杆伸出,带动电极清洗机构3向前(靠近电焊机方向)移动至工
位,具体是气缸二6带动连接板二14、连接板二14带动l安装板8、l安装板8带动电机9和清洗部10运动,l安装板8沿滑台二7滑动;然后电极清洗机构3作业,具体是电机9启动,带动清洗部10旋转,清洗部10开始清洗作业。清洗一段时间后,停止电机9,再反向控制,先通过控制气缸二6的活塞杆收缩复位,再控制气缸一4的活塞杆收缩复位,即完成一次清洗作业循环,等下一循环再继续作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1