车辆用驱动装置的制作方法
1.本发明涉及一种车辆用驱动装置。
背景技术:
2.近年来,从降低环境负荷的观点出发,在卡车等商用车的领域中也进行了对于不包括内燃机而仅由电动马达驱动的电动卡车的开发。作为这种电动车辆的驱动单元,已知存在下述驱动单元,即:例如该驱动单元包括马达和由多个齿轮构成的减速机构等动力传递机构,从而能够将马达的驱动力传递到与驱动轮连结的差速齿轮上(专利文献1)。
3.专利文献1:国际公开第2014/148410号公报
技术实现要素:
4.-发明要解决的技术问题-
5.在将这样的驱动单元安装于商用车等电动车辆的情况下,该驱动单元由梯形车架或横梁支承。
6.但是,在电动卡车的情况下,与乘用车相比,由马达产生的驱动转矩大,结果就是在马达驱动时在驱动单元产生的转矩反作用力变大。因此,由于要求托架等车辆用驱动装置具有更高的可靠性,因而有可能导致支承装置大型化、高重量化。
7.与乘用车相比,在电动卡车的情况下,驱动单元本身大型化、高重量化,因而在车辆产生侧倾或俯仰的情况下,在驱动单元产生的力矩也会变大。因此,在这样的车辆用驱动装置中,需要提高驱动单元在车辆侧倾时或俯仰时的稳定性。
8.本发明是为了解决至少一部分这样的问题而完成的,其目的在于:提供一种能够在抑制支承装置的大型化、高重量化的同时,提高驱动单元在车辆侧倾时等的稳定性的车辆用驱动装置。
9.-用以解决技术问题的技术方案-
10.(1)根据一个应用例所涉及的车辆用驱动装置是这样的:该车辆用驱动装置包括驱动单元,该驱动单元包括:马达,所述马达在包括梯形车架的车辆中产生驱动力;变速机构,所述变速机构对从所述马达传递的所述驱动力进行改变;以及差速部,所述差速部将从所述变速机构传递的所述驱动力实现差速地向所述车辆的驱动轮传递,该车辆用驱动装置包括:驱动单元壳体,所述驱动单元壳体容纳所述驱动单元的至少一部分;马达侧支承部,所述马达侧支承部通过设置在所述驱动单元壳体的马达侧端部区域的两个连结部将所述驱动单元壳体和所述梯形车架连结起来;以及差速部侧支承部,所述差速部侧支承部在所述驱动单元壳体的差速部侧端部区域将所述驱动单元壳体和所述梯形车架连结起来,所述马达侧支承部的两个连结部在车辆宽度方向上布置在比所述差速部侧支承部靠外侧的位置。
11.在上述应用例所涉及的车辆用驱动装置中,能够采用如下结构:马达侧支承部的两个连结部在车辆宽度方向上分别布置在比差速部侧支承部即差速部侧连结部靠外侧的
位置。与不采用该结构的车辆用驱动装置相比,由于两个连结部位于远离驱动单元的重心即远离侧倾中心的位置,因此能够减小连结部所受到的由驱动单元侧倾而产生的力矩。因此,能够降低对于连结部的刚性要求,也就是说,能够抑制支承装置即连结部的大型化、高重量化,同时将驱动单元支承在梯形车架上。这样一来,能够提高驱动单元在车辆侧倾时的稳定性。
12.(2)本应用例所涉及的车辆用驱动装置也可以是,在上述(1)的基础上,连结所述马达侧支承部的两个连结部的假想线与车辆宽度方向平行。也就是说,马达侧支承部的两个连结部在车辆前后方向上位于相同的位置,而使得作用于两个连结部的力均等。因此,对两个连结部的刚性要求相同,能够抑制连结部的大型化、高重量化。
13.(3)本应用例所涉及的车辆用驱动装置也可以是,在上述(1)或(2)的基础上,所述差速部侧支承部通过设置在所述驱动单元壳体的所述差速部侧端部区域的两个连结部将所述驱动单元壳体和所述梯形车架连结起来。与由一个连结部构成差速部侧支承部的情况相比,通过由两个连结部构成差速部侧支承部,而能够避免出现应力集中,降低对连结部的刚性要求,因此能够抑制连结部的大型化、高重量化。
14.(4)本应用例所涉及的车辆用驱动装置也可以是,在上述(3)的基础上,所述马达侧支承部的两个连结部和所述差速部侧支承部的两个连结部布置成:在从车辆上方俯视观察时,连结所述马达侧支承部的两个连结部和所述差速部侧支承部的两个连结部的假想线成为以所述马达侧支承部的两个连结部之间的假想线为下底的梯形,该梯形在车宽方向上呈线对称。
15.如上所述,在从车辆上方俯视观察时,通过将马达侧支承部的连结部及差速部侧支承部的连结部这四处连结部布置成使连结该四处连结部的假想线形成梯形,由此能够提高车辆整体的侧倾性能。具体而言,由于车辆和驱动装置是相互独立的质量体,因此为了提高车辆整体的侧倾性能,优选使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心尽可能一致。因此,通过将上述马达侧支承部的两个连结部和上述差速部侧支承部的两个连结部布置成在车宽方向上呈线对称的梯形,从而容易使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心一致,能够提高车辆整体的侧倾性能。
16.(5)本应用例所涉及的车辆用驱动装置也可以是,在上述(1)至(4)中的任一项的基础上,所述马达侧支承部在车辆高度方向上位于比所述差速部侧支承部靠下方的位置。在这样的结构中,连结马达侧支承部和差速部侧支承部的轴通过驱动单元壳体的内部。因此,能够降低对马达侧支承部的连结部的刚性要求,也就是说,能够抑制支承装置即连结部的大型化、高重量化,同时将驱动单元支承在梯形车架上。这样一来,能够提高驱动单元在车辆侧倾时的稳定性。
17.(6)本应用例所涉及的车辆用驱动装置也可以是,在上述(1)至(4)中的任一项的基础上,所述马达侧支承部在车辆高度方向上位于比所述差速部侧支承部靠上方的位置。在这样的结构中,连结马达侧支承部和差速部侧支承部的轴通过驱动单元壳体的内部。因此,能够降低对马达侧支承部的连结部的刚性要求,也就是说,能够抑制支承装置即连结部的大型化、高重量化,同时将驱动单元支承在梯形车架上。这样一来,能够提高驱动单元在车辆侧倾时的稳定性。
附图说明
18.图1是示出当从车辆侧方观察时本发明的一实施例所涉及的车辆用驱动装置的简图;
19.图2是示出当从车辆前方观察时图1的车辆用驱动装置的图;
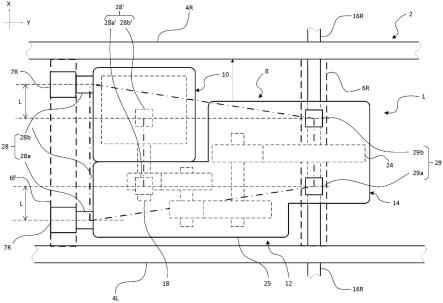
20.图3是示出当从车辆上方观察时图1的车辆用驱动装置的图;
21.图4是示出当从车辆侧方观察时本发明的比较例所涉及的车辆用驱动装置的简图;
22.图5是示出当从车辆前方观察时图4的车辆用驱动装置的图;
23.图6是示出当从车辆上方观察时图4的车辆用驱动装置的图;
24.图7是示出当从车辆侧方观察时本发明的其他实施例所涉及的车辆用驱动装置的简图;
25.图8是示出当从车辆前方观察时图7的车辆用驱动装置的图;
26.图9是示出当从车辆上方观察时图7的车辆用驱动装置的图。
具体实施方式
27.下面,参照附图对本发明的实施例的结构进行详细的说明。
28.<实施例的结构>
29.下面,使用图1到图3对本发明的一实施例所涉及的车辆用驱动装置1的简要结构进行说明。图1是示出当从车辆侧方观察时本发明的一实施例所涉及的车辆用驱动装置1的简图。需要说明的是,在图1中,为了便于说明特征,以对下文将要描述的一对纵梁4l、4r侧视时仅能看到里侧的纵梁4r的视点示出了车辆用驱动装置1。图2是示出当从车辆前方观察时车辆用驱动装置1的图。图3是示出当从车辆上方观察时车辆用驱动装置1的图。
30.应用车辆用驱动装置1的车辆例如为包括马达的电动卡车,其中,马达作为行驶用驱动源,在梯形车架2上安装有未图示的驾驶室及货箱等。梯形车架2包括沿车辆前后方向y延伸的左右一对纵梁4l、4r和设置在纵梁4l、4r之间的多根横梁6f、6r。
31.一对纵梁4l、4r以在车辆宽度方向x上具有规定间隔的方式而设。横梁6f、6r沿车辆宽度方向x延伸,横梁6f、6r的两端与各纵梁4l、4r连接,且横梁6f、6r以在车辆前后方向y上具有规定间隔的方式设有多根。在梯形车架2的下方设有车辆的驱动单元8。
32.横梁6的形状只要能够借助后述的连结部28a、28b、29a、29b支承驱动单元8即可,并没有特别限定。
33.驱动单元8包括:车辆的行驶用驱动源即马达10、被容纳在与马达10连接的变速箱12内的变速机构20、以及与变速机构20连接的差速装置(差速部)14。马达10通过由安装在车辆上的未图示的电池供给来的功率进行驱动而产生驱动力。
34.在差速装置14上连结有一对驱动轴16l、16r。变速机构20具有多个齿轮20a、20b等。马达10的旋转轴18与变速机构20的输入侧齿轮20a连结。
35.变速机构20通过对从马达10侧输入的高转速、低转矩进行改变,由此例如能够转换成低转速、高转矩后输出。差速装置14包括差速齿轮24,变速机构20的输出侧齿轮20b与差速齿轮24连接,由此,由变速机构20减速后的输出被输入到差速装置14。
36.如上所述,马达10的驱动力经由变速机构20被传递到差速装置14。差速装置14根
据车辆的行驶状态,将从变速箱12侧输入的动力经由左右一对输出轴以规定比率传递给左右一对驱动轴16l、16r,进而传递给未图示的车轮。这样一来,实现车辆的行驶。
37.这里,马达10、变速机构20以及差速装置14被容纳在构成驱动单元8的驱动单元壳体25内,从而一体构成驱动单元8。驱动单元壳体25的马达侧端部区域由构成马达侧支承部28的两个连结部28a、28b支承,该马达侧支承部28用于与构成梯形车架2的横梁6f连结。详细而言,横梁6f构成为连接有从横梁6f向车辆高度方向z的下方延伸的支承部件7l、7r,支承部件7l、7r与连结部28a、28b连结。驱动单元壳体25的差速部侧端部区域由构成差速部侧支承部29的两个连结部29a、29b支承,该差速部侧支承部29用于与构成梯形车架2的横梁6r连结。这样一来,驱动单元壳体25与连结部28a、28b和连结部29a、29b以及横梁6f、6r连结,由此车辆用驱动装置1被支承在梯形车架2的车辆高度方向z上的下方。需要说明的是,马达侧支承部28的两个连结部28a、28b在车辆前后方向y上位于相同的位置。也就是说,连结两个连结部28a、28b的假想线(图3中的点划线)与车辆宽度方向x平行。差速部侧支承部29的两个连结部29a、29b在车辆前后方向y上位于相同的位置。也就是说,连结两个连结部29a、29b的假想线(图3中的点划线)与车辆宽度方向x平行。需要说明的是,在图3中,用虚线表示的连结部28a’、28b’示出了后述的比较例所涉及的连结部。
38.马达侧支承部28的两个连结部28a、28b构成为:在车辆宽度方向x上分别布置在比差速部侧支承部29即连结部29a、29b靠外侧的位置。如图3所示,在比较连结部28a和连结部29a时,从车辆的中心、即纵梁4l与4r之间的中心观察时,连结部28a布置在比连结部29a靠纵梁4l侧、即布置在比连结部29a靠车辆宽度方向x上的外侧。在比较连结部28b和连结部29b时,从车辆的中心、即纵梁4l与4r之间的中心观察时,连结部28b布置在比连结部29a靠纵梁4r侧、即布置在比连结部29a靠车辆宽度方向x上的外侧。因此,在从车辆上方俯视观察时,连结连结部28a、28b的假想线(图3中的点划线)、连结连结部28a、29a的假想线(图3中的点划线)、连结连结部28b、29b的假想线(图3中的点划线)、以及连结连结部29a、29b的假想线(图3中的点划线)成为以马达侧支承部28的两个连结部28a、28b之间的假想线为下底、以差速部侧支承部29的两个连结部29a、29b之间的假想线为上底的梯形。
39.如图2所示,马达侧支承部28的连结部28a、28b构成为在车辆高度方向z上位于比差速部侧支承部29的连结部29a、29b靠下方的位置。
40.<比较例的结构>
41.接着,使用图4到图6对本发明的比较例所涉及的车辆用驱动装置1’的简要结构进行说明。需要说明的是,对与之前说明的实施例相同的结构标注相同的附图标记,并省略详细的说明。对之前说明的实施例中的附图标记附加
“’”
来表示功能等与之前说明的实施例相对应的结构。图4是示出当从车辆侧方观察时本发明的比较例所涉及的车辆用驱动装置1’的简图。需要说明的是,在图4中,为了便于说明特征,以对后述的一对纵梁4l’、4r’侧视时仅能看到里侧的纵梁4r’的视点示出了车辆用驱动装置1’。图5是示出当从车辆前方观察时车辆用驱动装置1’的图,图6是示出当从车辆上方观察时车辆用驱动装置1’的图。
42.驱动单元壳体25’的马达侧端部区域由构成马达侧支承部28’的两个连结部28a’、28b’支承,该马达侧支承部28’用于与构成梯形车架2’的横梁6f’连结。驱动单元壳体25’的差速部侧端部区域由构成差速部侧支承部29’的两个连结部29a’、29b’支承,该差速部侧支承部29’用于与构成梯形车架2’的横梁6r’连结。这样一来,驱动单元壳体25’与连结部
28a’、28b’和连结部29a’、29b’以及横梁6f’、6r’连结,由此车辆用驱动装置1被支承在梯形车架2’上。
43.马达侧支承部28’的两个连结部28a’、28b’构成为:在车辆宽度方向x上分别布置在与差速部侧支承部29’的连结部29a’、29b’相同的位置。因此,在图6中从车辆上方俯视观察时,连结连结部28a’、28b’的假想线(图6中的点划线)、连结连结部28a’、29a’的假想线(图6中的点划线)、连结连结部28b’、29b’的假想线(图6中的点划线)、以及连结连结部29a’、29b’的假想线(图6中的点划线)成为以马达侧支承部28的两个连结部28a、28b之间的假想线为底边、以差速部侧支承部29的两个连结部29a、29b之间的假想线为上边的长方形。
44.如图5所示,马达侧支承部28的连结部28a’、28b’构成为在车辆高度方向z上与差速部侧支承部29的连结部29a’、29b’位于相同的高度。
45.<实施例与比较例之间的对比>
46.接着,对之前所说明的实施例与比较例之间进行对比说明。
47.当车辆行驶时,在车辆产生侧倾或俯仰的情况下,重物即驱动单元8产生的力矩也会变大。因此,在驱动单元8产生的力矩经由连结部28a、28b(比较例的连结部28a’、28b’)及连结部29a、29b(比较例的连结部29a’、29b’)被输入到梯形车架2(比较例的梯形车架2’)。从行驶稳定性的观点出发,优选驱动单元8产生的侧倾和俯仰、与车辆产生的侧倾和俯仰为同相位。但是,在连结部28a、28b(比较例的连结部28a’、28b’)及连结部29a、29b(比较例的连结部29a’、29b’)的安装刚性较低的情况下,车辆产生的侧倾和俯仰与驱动单元8产生的侧倾和俯仰的相位就会错开,从而损害行驶稳定性。需要说明的是,所谓侧倾是指车辆以车辆前后方向y上的轴为中心左右摆动的状态,所谓俯仰是指车辆以车辆宽度方向x上的轴为中心前后摆动的状态。
48.这里,在实施例的结构中,马达侧支承部28的两个连结部28a、28b构成为:在车辆宽度方向x上分别布置在比差速部侧支承部29即连结部29a、29b靠外侧的位置。相对于此,在比较例的结构中,马达侧支承部28’的两个连结部28a’、28b’构成为:在车辆宽度方向x上分别布置在与差速部侧支承部29’即连结部29a’、29b’相同的位置处。
49.这里,对驱动单元8随着车辆侧倾而产生的侧倾进行研究。当车辆侧倾时,驱动单元8也产生侧倾。但是,在容纳实施例所涉及的驱动单元8的驱动单元壳体25中,构成重物即马达10侧的马达侧支承部28的连结部28a和连结部28b在车辆宽度方向x上的距离大于比较例。也就是说,连结部28a和连结部28b位于远离驱动单元8的重心即侧倾中心的位置处,因此能够减小连结部28a、28b所受到的由驱动单元8侧倾而产生的力矩。因此,能够降低对连结部28a、28b的刚性要求,也就是说,能够抑制支承装置即连结部28a、28b的大型化、高重量化,同时将驱动单元8支承在梯形车架2上。这样一来,能够提高驱动单元8在车辆侧倾时的稳定性。
50.在实施例中,当车辆侧倾时,在图1的从侧面观察到的图中,容纳驱动单元8的驱动单元壳体25以连结马达侧支承部28和差速部侧支承部29的轴(图1中的点划线)为中心产生晃动。在比较例中,连结马达侧支承部28’和差速部侧支承部29’的轴(图4中的点划线)位于驱动单元壳体25’的车辆高度方向z的上方。因此,重物即驱动单元8容易随着车辆侧倾而产生较大的晃动。相对于此,在实施例中,由于马达侧支承部28在车辆高度方向z上位于比差速部侧支承部29靠下方的位置,因此连结马达侧支承部28和差速部侧支承部29的轴(图1中
的点划线)通过驱动单元壳体25的内部。马达侧支承部28位于驱动单元8的结构中的重物即马达10的重心附近。即,连结马达侧支承部28和差速部侧支承部29的轴(图1中的点划线)通过驱动单元8的重心附近。因此,能够降低对连结部28a、28b的刚性要求,也就是说,能够抑制支承装置即连结部28a、28b的大型化、高重量化,同时将驱动单元8支承在梯形车架2上。这样一来,能够提高驱动单元8在车辆侧倾时的稳定性。
51.而且,在驱动单元8产生侧倾时,如上文所述,由于马达10作为驱动单元8的构成物,其重量较大,因此驱动单元壳体25的马达侧端部区域和差速部侧端部区域的动作不同,有时马达侧端部区域会产生较大幅度的侧倾。此时,在图6中从车辆上方俯视观察时,比较例中连结连结部28a’、28b’的假想线(图6中的点划线)、连结连结部28a’、29a’的假想线(图6中的点划线)、连结连结部28b’、29b’的假想线(图6中的点划线)、以及连结连结部29a’、29b’的假想线(图6中的点划线)成为以马达侧支承部28的两个连结部28a、28b之间的假想线为底边、以差速部侧支承部29的两个连结部29a、29b之间的假想线为上边的长方形。相对于此,在实施例所涉及的方式中,如图3所示,在从车辆上方俯视观察时,连结连结部28a、28b的假想线(图3中的点划线)、连结连结部28a、29a的假想线(图3中的点划线)、连结连结部28b、29b的假想线(图3中的点划线)、以及连结连结部29a、29b的假想线(图3中的点划线)成为以马达侧支承部28的两个连结部28a、28b之间的假想线为下底,以差速部侧支承部29的两个连结部29a、29b之间的假想线为上底,在车辆宽度方向x上呈线对称的梯形(线对称轴:沿车辆前后方向y延伸)。
52.如上所述,在从车辆上方俯视观察时,通过将马达侧支承部28的连结部28a、28b及差速部侧支承部29的连结部29a、29b这四处连结部布置成使连结该四处连结部的假想线形成梯形,由此能够提高车辆整体的侧倾性能。具体而言,由于车辆和驱动装置是相互独立的质量体,因此为了提高车辆整体的侧倾性能,优选使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心尽可能一致。因此,如图3所示,将四个连结部布置成使得在连结部28a和连结部28b处,与比较例相比所增加的车辆宽度方向x上的长度l是均等的,由此容易使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心一致,能够提高车辆整体的侧倾性能。
53.接着,对驱动单元8随着车辆俯仰而产生的俯仰进行研究。当车辆俯仰时,驱动单元8也产生俯仰。但是,在容纳实施例所涉及的驱动单元8的驱动单元壳体25中,构成重物即马达10侧的马达侧支承部28的连结部28a、28b与构成差速部侧支承部29的连结部29a、29b在车辆前后方向y上的距离大于比较例。也就是说,连结部28a和连结部28b位于远离驱动单元8的重心即俯仰中心的位置处,因此能够减小连结部28a、28b所受到的由驱动单元8俯仰而产生的力矩。因此,能够降低对连结部28a、28b的刚性要求,也就是说,能够抑制支承装置即连结部28a、28b的大型化、高重量化,同时将驱动单元8支承在梯形车架2上。这样一来,能够提高驱动单元8在车辆俯仰时的稳定性。
54.接着,对当马达10励磁时的转矩反作用力进行研究。当马达10励磁时,旋转轴18就会旋转,该旋转经由变速机构20被传递到差速装置14的差速齿轮24,并经由一对驱动轴16l、16r使车轮旋转。此时,借助来自路面的相对于车轮旋转的反作用力,就会在驱动单元8中产生以驱动轴16l、16r为中心的旋转力矩。这里,驱动轴16l、16r的轴与实施例所涉及的马达侧支承部28的连结部28a、28b之间的距离比驱动轴16l、16r与比较例的马达侧支承部28’的连结部28a’、28b’之间的距离大。也就是说,能够在更远的位置处支承施加到驱动单
元8上的旋转力矩。因此,能够抑制实施例所涉及的马达侧支承部28的连结部28a、28b的大型化、高重量化,同时将驱动单元8支承在梯形车架2上,能够提高驱动单元8在马达10驱动时的稳定性。
55.如上所述,本实施方式的车辆用驱动装置1包括驱动单元,该驱动单元包含:马达10,所述马达10在包括梯形车架2的车辆中产生驱动力;变速机构20,所述变速机构20对从马达10传递的驱动力进行改变;以及差速装置14,所述差速装置14将从变速机构20传递的驱动力实现差速地向车辆的驱动轮传递,该车辆用驱动装置能够采用下述结构:其包含:驱动单元壳体25,所述驱动单元壳体25容纳驱动单元8的至少一部分;马达侧支承部28,所述马达侧支承部28通过设置在驱动单元壳体25的马达侧端部区域的两个连结部将驱动单元壳体25和梯形车架2连结起来;以及差速部侧支承部29,所述差速部侧支承部29在驱动单元壳体25的差速部侧端部区域将驱动单元壳体25和梯形车架2连结起来,马达侧支承部28的两个连结部28a、28b在车辆宽度方向上布置在比差速部侧支承部29靠外侧的位置。
56.因此,与不采用该结构的车辆用驱动装置相比,两个连结部28a、28b位于远离驱动单元8的重心即远离侧倾中心的位置,因而能够减小连结部28a、28b所受到的由驱动单元8侧倾而产生的力矩。因此,能够降低对于连结部28a、28b的刚性要求,也就是说,能够抑制支承装置即连结部的大型化、高重量化,同时将驱动单元8支承在梯形车架2上。这样一来,能够提高驱动单元8在车辆侧倾时的稳定性。
57.马达侧支承部的两个连结部28a、28b在车辆前后方向y上位于相同的位置,连结马达侧支承部28的两个连结部28a、28b的假想线与车辆宽度方向x平行。因此,能够使施加在两个连结部28a、28b上的力均等,因而对两个连结部28a、28b的刚性要求相同,能够抑制连结部28a、28b的大型化、高重量化。
58.差速部侧支承部29通过设置在驱动单元壳体25的差速部侧端部区域的两个连结部29a、29b将驱动单元壳体25和梯形车架2的横梁6r连结起来。因此,与由一个连结部构成差速部侧支承部的情况相比,通过由两个连结部29a、29b构成差速部侧支承部29,而能够避免出现应力集中,降低对连结部29a、29b的刚性要求,抑制连结部29a、29b的大型化、高重量化。
59.在从车辆上方俯视观察时,连结马达侧支承部28的两个连结部28a、28b和差速部侧支承部29的两个连结部29a、29b的假想线布置成以马达侧支承部28的两个连结部之间的假想线为下底的梯形,该梯形在车宽方向上呈线对称。
60.如上所述,在从车辆上方俯视观察时,通过将马达侧支承部28的连结部28a、28b及差速部侧支承部29的连结部29a、29b这四处连结部布置成使连结该四处连结部的假想线形成梯形,由此能够提高车辆整体的侧倾性能。具体而言,由于车辆和驱动装置是相互独立的质量体,因此为了提高车辆整体的侧倾性能,优选使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心尽可能一致。因此,如图3所示,布置成在连结部28a和连结部28b处,与比较例相比所增加的车辆宽度方向x上的长度l是均等的,由此容易使驱动装置侧的侧倾轴中心与车辆侧的侧倾轴中心一致,能够提高车辆整体的侧倾性能。
61.马达侧支承部28在车辆高度方向z上位于比差速部侧支承部29靠下方的位置。因此,连结马达侧支承部28和差速部侧支承部29的轴通过驱动单元壳体25的内部。因此,能够降低对马达侧支承部28的连结部28a、28b的刚性要求,也就是说,能够抑制支承装置即连结
部28a、28b的大型化、高重量化,同时经由从横梁6f延伸出的支承部件7l、7r将驱动单元支承在梯形车架2上。这样一来,能够提高驱动单元8在车辆侧倾时等的稳定性。
62.需要说明的是,在上述实施例中,差速部侧支承部29由两个连结部29a、29b构成,但也可以将连结部29a和连结部29b合成一个连结部来作为差速部侧支承部29。
63.<其他实施例的结构>
64.接着,使用图7到图9对本发明的其他实施例所涉及的车辆用驱动装置1”的简要结构进行说明。需要说明的是,对与之前说明的实施例相同的结构标注相同的附图标记,并省略详细的说明。对之前说明的实施例中的附图标记附加
“””
来表示功能等与之前所说明的实施例相对应的结构。图7是示出当从车辆侧方观察时本发明的其他实施例所涉及的车辆用驱动装置1”的简图。需要说明的是,在图7中,为了便于说明特征,以对后述的一对纵梁4l”、4r”侧视时仅能看到里侧的纵梁4r”的视点示出了车辆用驱动装置1”。图8是示出当从车辆前方观察时车辆用驱动装置1”的图。图9是示出当从车辆上方观察时车辆用驱动装置1”的图。
65.驱动单元壳体25”的马达侧端部区域由构成马达侧支承部28”的两个连结部28a”、28b”支承,该马达侧支承部28”用于与构成梯形车架2”的横梁6f”连结。详细而言,横梁6f”构成为连接有从横梁6f”向车辆高度方向z的上方延伸的支承部件7l”、7r”,支承部件7l”、7r”与连结部28a”、28b”连结。驱动单元壳体25”的差速部侧端部区域由构成差速部侧支承部29”的两个连结部29a”、29b”支承,该差速部侧支承部29”用于与构成梯形车架2”的横梁6r”连结。这样一来,驱动单元壳体25”与连结部28a”、28b”和连结部29a”、29b”以及横梁6f”、6r”连结,由此车辆用驱动装置1”被支承在梯形车架2”的车辆高度方向z的上方。
66.马达侧支承部28”的两个连结部28a”、28b”构成为:在车辆宽度方向x上分别布置在比差速部侧支承部29”即连结部29a”、29b”靠外侧的位置。如图9所示,在比较连结部28a”和连结部29a”时,从车辆的中心、即纵梁4l”和4r”的中心观察时,连结部28a”布置在比连结部29a”靠纵梁4l”侧、即布置在比连结部29a”靠车辆宽度方向x上的外侧。同样地,在比较连结部28b”和连结部29b”时,从车辆的中心、即纵梁4l”和4r”的中心观察时,连结部28b”布置在比连结部29a”靠纵梁4r”侧、即布置在比连结部29a”靠车辆宽度方向x上的外侧。因此,在从车辆上方俯视观察时,连结连结部28a”、28b”的假想线(图9中的点划线)、连结连结部28a”、29a”的假想线(图9中的点划线)、连结连结部28b”、29b”的假想线(图9中的点划线)、以及连结连结部29a”、29b”的假想线(图9中的点划线)成为以马达侧支承部28”的两个连结部28a”、28b”之间的假想线为下底、以差速部侧支承部29”的两个连结部29a”、29b”之间的假想线为上底的梯形。
67.如图8所示,马达侧支承部28”的连结部28a”、28b”构成为在车辆高度方向z上位于比差速部侧支承部29”的连结部28a”、28b”靠上方的位置。
68.如上所述,本发明的其他实施例所涉及的车辆用驱动装置1”构成为:驱动单元8位于梯形车架2”的车辆高度方向z上的上方。如图7、图8所示,本发明的其他实施例所涉及的车辆用驱动装置1”的马达侧支承部28”位于比差速部侧支承部29”靠车辆高度方向z上的上方。在实施例中,当车辆侧倾时,在图7的从侧面观察到的图中,容纳驱动单元8的驱动单元壳体25”以连结马达侧支承部28”和差速部侧支承部29”的轴为中心产生晃动。由于马达侧支承部28”在车辆高度方向z上位于比差速部侧支承部29”靠上方的位置,因此连结马达侧
支承部28”和差速部侧支承部29”的轴(图7中的点划线)通过驱动单元壳体25”的内部。马达侧支承部28”位于驱动单元8的结构中的重物即马达10的重心附近。即,连结马达侧支承部28”和差速部侧支承部29”的轴(图7的点划线)通过驱动单元8的重心附近。因此,能够降低对连结部28a”、28b”的刚性要求,也就是说,能够抑制支承装置即连结部28a”、28b”的大型化、高重量化,同时将驱动单元8支承在梯形车架2”上。这样一来,即使当采用驱动单元8位于梯形车架2”的车辆高度方向z上的上方的结构时,也能够提高驱动单元8在车辆侧倾时的稳定性。
69.需要说明的是,在上述实施例中,以仅具有马达10作为行驶用驱动源的电动卡车为例进行了说明,但车辆用驱动装置1也能够适用于将内燃机与马达10并用的混合动力式电动卡车。车辆用驱动装置1不仅能够适用于电动卡车,也能够适用于包括马达10的所有商用车。
70.在上述实施例中,驱动单元壳体25容纳驱动单元8,但也可以构成为仅容纳驱动单元8的一部分。
71.在上述实施例中,驱动单元壳体25容纳驱动单元8,但也可以构成为仅容纳驱动单元8的一部分。
72.在上述实施例中,以具有变速机构20的驱动单元8为例进行了说明,但本发明所涉及的驱动单元8也可以是包括多级变速机构的驱动单元。
73.以上,对本发明的实施例进行了说明,但能够以其他各种方式实施本发明,能够在不脱离发明的主旨的范围内进行各种省略、置换、改变。这些实施例及其变形包含在发明的范围和主旨中,同样也包含在权利要求书所记载的发明及其同等范围内。
74.1车辆用驱动装置
75.2梯形车架
76.4l、4r纵梁
77.6f、6r横梁
78.7l、7r支承部件
79.8驱动单元
80.10马达
81.14差速装置
82.16l、16r驱动轴
83.18旋转轴
84.20变速机构
85.20a、20b变速齿轮
86.24差速齿轮
87.25驱动单元壳体
88.28马达侧支承部
89.28a、28b连结部
90.29差速部侧支承部
91.29a、29b连结部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1