一种半自动爬楼随动购物车的制作方法
[0001]
本实用新型涉及一种购物车,尤其是涉及一种半自动爬楼随动购物车。
背景技术:
[0002]
在日常生活中,老年人在购物时难以长时间负重,在没有电梯的老式住宅楼,需要购买的货物搬运至楼上,耗费体力,对于老人来说比较困难。一般的购物车无法实现爬楼梯的功能。
[0003]
现有技术也给出了一些解决方案,中国专利cn202010279020.2提出了一种蓄电池助力攀爬楼梯多功能购物车,包括车身底架,设置在此车身底架下方的驱动轮系,设置在车身底架上的载物筐,与车身底架通过支架连接的握把件,驱动轮系为三角轮,驱动时由直流电机提供动力,三角轮实现爬楼效果。
[0004]
但该专利存在以下问题:
[0005]
三角轮本身体积大,结构复杂,同时三角轮中任意两轮间跨度还必须均大于单阶楼梯高度,才能确保通过三角轮实现爬楼效果,进一步加大了三角轮的体积,成本高,不利于收纳。
技术实现要素:
[0006]
本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种半自动爬楼随动购物车,结构简单,节省人力。
[0007]
本实用新型的目的可以通过以下技术方案来实现:
[0008]
一种半自动爬楼随动购物车,包括车架,所述的车架上设有控制器、驱动轮和万向轮,所述的驱动轮连接有与控制器连接的轮毂电机,所述的控制器连接有电源,所述的车架上设有跟随模块和爬楼模块,所述的跟随模块包括与控制器连接的避障模块和超宽带模块,所述的爬楼模块包括依次连接的伺服电机、减速箱和爬梯杆,所述的爬梯杆的形状呈中心对称,且伺服电机的输出杆固定在爬梯杆的对称中心上,所述的伺服电机与控制器连接。
[0009]
进一步地,所述的超宽带模块为uwb模块,其型号为bp-twr-50。
[0010]
进一步地,所述的超宽带模块的数量为2个,2个超宽带模块对称设置在车架上。
[0011]
进一步地,所述的避障模块包括3个超声波传感器和2个激光传感器。
[0012]
进一步地,所述的超声波传感器的型号为hc-sr04,所述的激光传感器的型号为xljg100cm。
[0013]
进一步地,所述的爬梯杆的两端设有橡胶轮。
[0014]
进一步地,所述的爬梯杆为s形。
[0015]
进一步地,所述的控制器的型号为stm32f103。
[0016]
进一步地,所述的车架上设有挡板,该挡板上设有固定座,所述的伺服电机通过连接杆固定在固定座上。
[0017]
进一步地,所述的车架上设有安装盒,所述的控制器置于安装盒内。
[0018]
与现有技术相比,本实用新型具有以如下有益效果:
[0019]
(1)本实用新型在车架上设置驱动轮和万向轮,控制器通过轮毂电机带动驱动轮,车架上还设置有跟随模块和爬楼模块,跟随模块包括与控制器连接的避障模块和超宽带模块,超宽带模块可用于半自动爬楼随动购物车确定使用者的位置,实现自动跟随,避障模块能实现自动避障,自动化程度高,爬楼模块包括依次连接的伺服电机、减速箱和爬梯杆,控制器通过伺服电机驱动爬梯杆旋转,爬梯杆的端部与楼梯面接触,爬梯杆会向半自动爬楼随动购物车施加反作用力,该反作用力带动半自动爬楼随动购物车整体上升,只需扶住车架即可实现半自动爬楼随动购物车的自动爬楼,同时在平地上半自动爬楼随动购物车也可自动行走,节省人力;
[0020]
(2)本实用新型采用的爬梯杆的形状呈中心对称,仅需要两根爬梯杆即可实现爬楼,结构简单,成本低,质量轻且便于携带;
[0021]
(3)本实用新型在车架上设有用于定位的超宽带模块,超宽带模块为uwb模块,采用超宽带三角定位技术,以购物车为原点确定使用者的方向和距离,易于实现,定位准确度高;
[0022]
(4)本实用新型在车架上设有用于避障和自动跟随使用者的避障模块,避障模块包括超声波传感器和激光传感器,保证近距离和远距离检测的准确度,检测可靠性高;
[0023]
(5)本实用新型在爬梯杆的两端设有橡胶轮,增大爬梯杆的摩擦阻力,使得爬楼过程稳定。
附图说明
[0024]
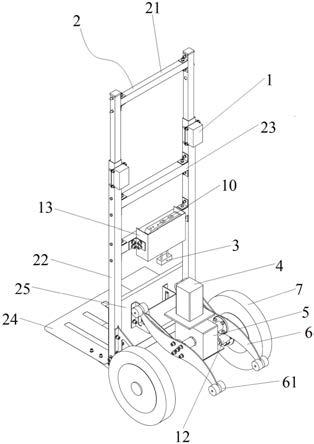
图1为本实用新型前侧的结构示意图;
[0025]
图2为本实用新型后侧的结构示意图;
[0026]
图3为连接杆的结构示意图;
[0027]
图中标号说明:
[0028]
1.超宽带模块,2.车架,3.避障模块,4.伺服电机,5.减速箱,6.爬梯杆,7.驱动轮,8.连接杆,9.固定座,10.控制器,11.万向轮,12.轮毂电机,13.安装盒,21.拉杆,22.套杆,23.加强杆,24.置物座,25.挡板,61.橡胶轮。
具体实施方式
[0029]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0030]
一种半自动爬楼随动购物车,如图1、图2和图3,包括车架2,车架2上设有跟随模块和爬楼模块,跟随模块包括超宽带模块1和避障模块3,爬楼模块包括伺服电机4、减速箱5、爬梯杆6、2个驱动轮7、控制器10、万向轮11和电源14,控制器10的型号为stm32f103,驱动轮7连接有轮毂电机12,超宽带模块1、避障模块3、伺服电机4、轮毂电机12和电源14与控制器10连接。爬梯杆6为呈中心对称的s形,伺服电机4的输出杆固定在爬梯杆6的对称中心上,伺服电机4具有2根输出轴,2根输出轴上各固定1根爬梯杆6,爬梯杆6的两端设有橡胶轮61。2个轮毂电机12分别与stm32f103的pa9和pa10接口连接,伺服电机4与stm32f103的pa7和pe4
接口连接。
[0031]
车架2包u形的拉杆21、2根套杆22和置物座24,万向轮11固定在置物座24上,驱动轮7固定在套杆22上,拉杆21的两端插入套杆22内,两根套杆22之间设有加强杆23和挡板25,挡板25上固定有固定座9,伺服电机4通过连接杆8固定在固定座9上,车架2上设有安装盒13,控制器10置于安装盒13内。
[0032]
超宽带模块1为uwb模块,超宽带模块1的数量为2个,2个超宽带模块1对称设置在2根套杆22上,使用者身上随身携带1个uwb模块,uwb模块的型号为bp-twr-50u,购物车上的2个bp-twr-50u分别与stm32f103的pa3和pa4接口连接,避障模块3设置在安装盒13上,包括3个超声波传感器和2个激光传感器,超声波传感器利用超声波反射原理,实现对购物车前方180
°
范围内障碍物的探测,激光传感器用于弥补超声波传感器存在近距离探测盲区,利用激光反射原理对近距离障碍物进行探测,保证购物车对障碍物探测的有效性和可靠性。
[0033]
超声波传感器型号为hc-sr04,激光传感器的型号为xljg100cm;
[0034]
3个hc-sr04与stm32f103连接的接口汇总表如表1所示:
[0035]
表1 hc-sr04连接接口汇总表
[0036][0037]
2个xljg100cm与stm32f103连接的接口汇总表如表2所示:
[0038]
表2 xljg100cm连接接口汇总表
[0039]
xljg100cm接口1pc22pc3
[0040]
半自动爬楼随动购物车的使用过程为:
[0041]
使用者随身携带1个uwb模块,控制器10根据超宽带三角定位技术,通过半自动爬楼随动购物车上的两个uwb模块对使用者随身携带uwb模块进行定位,确定购物车与使用者之间的距离和方位,然后控制器10控制轮毂电机12启动,带动驱动轮7,实现购物车的运动,从而实现对使用者的自动跟随,超声波传感器和激光传感器对超声波传感器和激光传感器的周围环境进行探测,控制器10接收传感器信息,并通过控制轮毂电机12实现半自动爬楼随动购物车躲避障碍物;在爬楼梯时控制器10通过启动伺服电机4带动s形爬梯杆6旋转,爬梯杆6端部的橡胶轮61与楼梯表面接触,爬梯杆6会向半自动爬楼随动购物车施加反作用力,该反作用力会带动半自动爬楼随动购物车整体向上提升,使用者只需手握拉杆21,即可实现半自动爬楼随动购物车的自动爬楼,节省人力。
[0042]
其中购物车的运动过程具体为:
[0043]
超宽带模块1判断购物车与使用者之间的距离和方向,若距离大于1m,则继续判断购物车的行驶方向,否则购物车减速停车;
[0044]
避障模块3检测购物车行驶方向前方的障碍物,检测距离为80cm,若在0-80cm范围内未检测到障碍物,购物车保持直行,若在0-30cm范围内检测到障碍物,则购物车后退,若在30-80cm范围内检测到障碍物,避障模块3检测购物车两侧是否具有障碍物,若购物车两侧均具有在0-30cm范围内的障碍物,购物车减速停车,若只有一侧在30-80cm范围内未检测到障碍物,购物车朝向该侧变道,若两侧均未在30-80cm范围内检测到障碍物,判断此时购物车当前行驶的方向是否朝向使用者,若是则购物车向左转,否则购物车朝向使用者的方向转动。
[0045]
本实施例提出了一种半自动爬楼随动购物车,在车架2上设置驱动轮7和万向轮11,控制器10通过轮毂电机12驱动万向轮11,车架2上还设置有依次连接的伺服电机4、减速箱5和爬梯杆6,爬梯杆6的形状呈中心对称,控制器10通过伺服电机4驱动爬梯杆旋转,爬梯杆6的端部与楼梯面接触,爬梯杆6会向半自动爬楼随动购物车施加反作用力,该反作用力带动半自动爬楼随动购物车整体上升,只需扶住车架2即可实现半自动爬楼随动购物车的自动爬楼,同时在平地上半自动爬楼随动购物车也可自动行走,节省人力,结构简单,便于携带。
[0046]
以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1