一种地面天线跟踪系统及飞行器实时方位追踪系统的制作方法
1.本实用新型涉及室外飞行器技术领域,特别涉及一种地面天线跟踪系统及飞行器实时方位追踪系统。
背景技术:
2.在飞行器室外飞行领域,目前市面上的大部分天线系统无自动跟踪功能,只能手动调整方向。由于室外飞行时环境中的不可避免的信号遮挡或者由于某种原因造成的信号不稳定,都会导致被跟踪的飞行器与天线之间的信号短暂丢失,信号丢失后,天线无法继续对飞行器进行跟踪,从而具有极大的安全隐患。
技术实现要素:
3.本实用新型的目的在于提供一种地面天线跟踪系统及飞行器实时方位追踪系统,不仅能自动追踪飞行器,还能在因遮挡或者传输链路不稳定等导致的信号短暂丢失情况下,对移动对象继续进行跟踪。
4.本实用新型提供一种地面天线跟踪系统,包括位于地面的旋转台、安装于所述旋转台上的天线和安装于天线的天线定位仪;所述天线包括处理器和与飞行器通信的通信装置;
5.所述处理器内置有选择开关、ukf计算器和航向角计算器,所述通信装置输出的数据包括飞行器的定位数据和速度;
6.所述天线定位仪连接所述航向角计算器,所述天线定位仪传输给航向角计算器的数据为以天线为坐标0点的天线定位数据,所述通信装置和所述ukf计算器相互连接,且均通过所述选择开关连接所述航向角计算器,所述选择开关断开时,所述ukf计算器连接所述航向角计算器以向所述航向角计算器传输预估的飞行器定位数据,所述选择开关连通时,所述通信装置连接所述航向角计算器以向航向角计算器传输实时的飞行器定位数据;
7.所述航向角计算器连接所述旋转台,以向所述旋转台传输飞行器所在航向角数据。
8.进一步地,所述航向角计算器通过误差控制计算器连接所述旋转台,所述误差控制计算器向所述旋转台传输的飞行器所在航向角数据为修正后航向角数据。
9.进一步地,所述天线还包括天线方位角检测仪,所述天线方位角检测仪连接所述ukf计算器以向其传输天线的方位角数据;所述ukf计算器连接所述误差控制计算器,以向所述误差控制计算器传输从天线方位角检测仪获取的所述天线当前的方位角数据,所述航向角计算器传输给所述误差控制计算器的数据包括用航向角计算器计算的天线和无人机之间的航向夹角数据,所述误差控制计算器向所述旋转台传输的数据为由方位角数据和夹角数据之间的角度误差生成的控制量,所述旋转台根据所述控制量旋转。
10.进一步地,所述处理器的主控芯片为atmele70n20芯片。
11.进一步地,所述ukf计算器内置ukf算法。
12.进一步地,所述天线方位角检测仪包括mpu6500陀螺、qmc5883l磁力计和u-blox定位芯片,还包括数据融合计算器,所述mpu6500陀螺、qmc5883l磁力计和u-blox定位芯片连接所述数据融合计算器的输入接口,所述数据融合计算器连接所述ukf计算器,所述数据融合计算器对所述ukf计算器输出的数据为所述天线当前的方位角数据。
13.进一步地,所述旋转台内设有旋转电机,所述误差控制计算器连接所述旋转电机以控制所述旋转电机旋转。
14.本实用新型提供还一种飞行器实时方位追踪系统,包括飞行器和所述的地面天线跟踪系统。
15.进一步地,所述飞行器上设有u-blox定位芯片,所述通信装置与所述飞行器上的u-blox 定位芯片通信。
16.进一步地,所述飞行器为无人飞行器。
17.本实用新型提供一种旋转工作台,包括旋转体和固定底座,还包括上述的地面天线跟踪系统,所述销孔板连接所述旋转体,所述安装底座连接所述固定底座。
18.本实用新型的有益效果有:本实用新型在飞行器和地面天线正常通信的情况下,天线能实时跟踪天线方位;在飞行器和地面天线信号丢失的情况下,通过飞行器前一时刻的速度和位置,对跟踪对象的位置进行预测跟踪,且通过旋转台使天线自动旋转实现自动跟踪。
附图说明
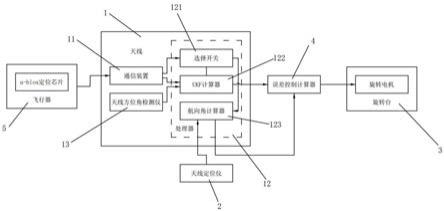
19.图1是本实用新型一种地面天线跟踪系统及飞行器实时方位追踪系统的示意图;
20.图2是本实用新型天线方位角检测仪的示意图;
21.图中:1.天线;2.天线定位仪;3.旋转台;4.误差控制计算器;5.飞行器;11.通信装置; 12.处理器;13.天线方位角检测仪;121.旋转开关;122.ukf计算器;123.航向角计算器; 131.mpu6500陀螺;132.qmc5883l磁力计;133.数据融合计算器。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
23.请参照图1,本实用新型提供一种地面天线跟踪系统,用于追踪室外移动装置,如飞行器,包括位于地面的旋转台3、安装于所述旋转台3上的天线1和安装于天线的天线定位仪2。
24.所述天线1包括处理器12和与飞行器5通信的通信装置11;所述处理器12内置有选择开关121、ukf计算器122和航向角计算器123,所述ukf计算器122连接所述通信装置11,飞行器5将其经、纬度、速度等信息传入所述通信装置11,并被所述通信装置11解码,然后所述通信装置11将解码后的数据传输给所述ukf计算器122以被所述ukf计算器122存储,方便所述ukf计算器122后续调用。所述通信装置11传输给ukf计算器122的数据包括飞行器5的定位数据和速度,飞行器的定位数据包括飞行器的在某一时刻的经度、纬度和飞行高度等,飞行器的速度包括飞行器在某一时刻的飞行速率、飞行方向和飞行加速度等。
25.所述通信装置11和所述ukf计算器122相互连接的同时,且均通过所述选择开关
121连接所述航向角计算器123,所述通信装置11和所述ukf计算器122与所述航向角计算器123 之间的连通,受所述旋转开关121控制:飞行器5与天线1之间的信号良好处于连通状态时,所述选择开关121处于连通状态,此时,所述飞行器5与所述通信装置11之间以固定频率进行通信,且所述通信装置11连通所述航向角计算器123,以向所述航向角计算器123传输被通信装置11解码的飞行器的实时定位数据和速度;飞行器5与天线1通信断开时,所述选择开关121随即自动断开,此时,所述ukf计算器122调取所述通信装置11传入的飞行器5上一时刻的定位数据和速度,并以此为计算参数,通过ukf算法预估飞行器下一刻的定位数据和速度,并将该下一刻的定位数据和速度进行存储,以用于对飞行器下下刻的定位数据和速度的预估,以此类推,从而在飞行器与地面短暂失联时,通过预判飞行器的位置来对飞行器进行跟踪,防止飞行器丢失或者发生其他意外。
26.所述天线定位仪2连接所述航向角计算器123,所述天线定位仪2用于检测所述天线1 所在位置的经度和纬度,所述天线定位仪2传输给航向角计算器123的数据为天线定位数据,所述航向角计算器123在接收到所述天线1的定位数据后,通过将所述天线1所在位置的经度、纬度作为坐标0点来构建空间坐标系。在所述航向角计算器123接收到上述的实时的飞行器定位数据、速度或预估的飞行器定位数据、速度时,所述航向角计算器123以坐标0点为参照点,计算出所述飞行器5的相对位置,并以此得出所述飞行器5相对所述天线1的航向角数据。
27.所述航向角计算器123连接所述旋转台3,以向所述旋转台3传输飞行器所在航向角数据,所述旋转台3根据所述航向角数据旋转,使所述天线1自动对准所述飞行器5,从而进行自动追踪。
28.所述航向角计算器123输出的航向角数据为初始航向角数据,为了增加追踪的精确度,所述航向角计算器123通过误差控制计算器4连接所述旋转台3,所述航向角计算器123将初始航向角数据传至所述误差控制计算器4,初始航向角数据被所述误差控制计算器4处理后变为修正后航向角数据,修正后航向角数据具有更高的精度,然后所述误差控制计算器4 将修正后航向角数据传输至所述旋转台3以控制所述旋转台3携带所述天线1旋转。
29.请参照图1和图2,所述天线1还包括天线方位角检测仪13,所述天线方位角检测,13 用于检测所述天线当前的角速度、角加速度、角偏移度等,所述天线方位角检测仪13连接所述ukf计算器122以向其传输天线的上述数据,所述ukf计算器122采用ukf算法根据被天线方位角检测仪13传输入的数据计算所述天线当前的方位角数据,所述ukf计算器122连接所述误差控制计算器4,以向所述误差控制计算器4传输所述天线当前的方位角数据,以作为所述误差控制计算器4进行误差控制时的依据。
30.所述天线方位角检测仪13包括mpu6500陀螺131、qmc5883l磁力计132和u-blox定位芯片,还包括数据融合计算器133,所述mpu6500陀螺131、qmc5883l磁力计132和u-blox 定位芯片连接所述数据融合计算器133的输入接口,所述mpu6500陀螺131、qmc5883l磁力计132和u-blox定位芯片用于检测所述天线1当前的角速度、角加速度、角偏移度等,所述数据融合计算器133将所述mpu6500陀螺131、qmc5883l磁力计132和u-blox定位芯片检测的数据进行融合计算,得到所述天线1当前最为准确的方位角数据,所述数据融合计算器133 连接所述ukf计算器122,所述数据融合计算器133对所述ukf计算器122输出的数据为所述天线1当前的方位角数据。
31.所述天线还包括天线方位角检测仪,所述天线方位角检测仪连接所述ukf计算器以向其传输天线的方位角数据;所述ukf计算器连接所述误差控制计算器,以向所述误差控制计算器传输从天线方位角检测仪获取的所述天线当前的方位角数据,所述航向角计算器传输给所述误差控制计算器的数据包括用航向角计算器计算的天线和无人机之间的航向夹角数据,所述误差控制计算器向所述旋转台传输的数据为由方位角数据和夹角数据之间的角度误差生成的控制量,所述旋转台根据所述控制量旋转。所述旋转台3内设有旋转电机,所述误差控制计算器4连接所述旋转电机以控制所述旋转电机旋转。优选所述处理器12的主控芯片为 atmele70n20芯片。
32.本实用新型还提供一种飞行器实时方位追踪系统,包括飞行器5和所述的地面天线跟踪系统。所述飞行器5上设有u-blox定位芯片,所述通信装置11与所述飞行器5上的u-blox 定位芯片通信。所述飞行器5可以为无人飞行器。
33.本实用新型在飞行器和地面天线正常通信的情况下,天线能实时跟踪天线方位;在飞行器和地面天线信号短暂丢失的情况下,通过飞行器前一时刻的速度和位置,对跟踪对象的位置进行预测跟踪,且通过旋转台使天线自动旋转实现自动跟踪。
34.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
35.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1