用于确定至少一个眼睛像差的装置和方法与流程
1.本发明涉及一种用于确定用户的至少一只眼睛的至少一个眼睛像差的装置、方法和计算机程序产品,以及用于生产用于用户的该至少一只眼睛的至少一个眼镜镜片的相关方法。
背景技术:
2.用于确定用户的至少一只眼睛的至少一个眼睛像差的装置、方法和计算机程序产品是已知的。如通常使用的,术语“眼睛像差”是指针对用户的至少一只眼睛确定的理想光学波前的表面与实际光学波前的表面之间的差异。本文中,术语“光学波前”是指与光传播所沿着的光束垂直的表面。在典型的人类群体内,眼睛像差通常包括至少一个二阶球柱镜聚焦误差,也称为“屈光误差(屈光不正)”,然而,其中也可能出现至少一个高阶像差。
3.根据x. wei & l. thibos (2010), design and validation of a scanning shack hartmann aberrometer for measurements of the eye over a wide field of view [用于在宽视场上测量眼睛的扫描型夏克哈特曼像差仪的设计和验证], optics express[光学快报], 18(2), 1134 https://doi.org/10.1364/oe.18.001134,周边视力和离轴像差不仅在日常视觉任务中起着重要作用,还可能影响眼睛的生长和屈光发育。因此,它们表明客观地测量人眼的离轴波前像差是重要的。为了实现有效的测量,作者将双程扫描系统结合到夏克哈特曼波前传感器(shws)中,以便获得扫描型夏克哈特曼像差仪(ssha)。本文中,原型ssha可以成功地用于在7秒内在
ꢀ±ꢀ
15
°
视场上测量离轴波前像差。在使用广角模型眼睛的两个验证实验中,该原型准确(《0.02
ꢀµ
m,4 mm瞳孔)且精确(《0.03
ꢀµ
m,4 mm瞳孔)地测量了散焦像差的变化。
[0004]
特别是,为了将双程扫描系统并入shws,shws的小透镜平面和x-y扫描镜的扫描轴线在光学上共同对准到与被测眼睛的入射光瞳共轭的平面上。为此目的,以如下方式使用三个光学中继望远镜:在入射光路中,扫描镜的扫描轴线经由光学中继望远镜之一形成扫描中心,该扫描中心经由另一光学中继望远镜进一步与眼睛的入射光瞳中心共轭。经由与扫描镜的扫描轴线和眼睛的入射光瞳中心相交的分束器来引入经空间滤波和准直的窄激光束。当扫描镜旋转时,激光束围绕位于眼睛的入射光瞳中心的枢轴点旋转,从而沿着如以物体空间中的角尺寸所指定的不同视线来注入激光束。在眼睛的图像空间中,激光束在视网膜上扫描并且形成一系列视网膜光点,其中该扫描短暂暂停(50 ms)以获取光学波前测量值。因此,针对扫描镜的每个位置,源自视网膜光点的光学波前被眼睛结构(特别是晶状体和角膜)调制,并出现在入射光瞳处。当出现的光学波前向后传播时,它被扫描镜去扫描,并且随后被shws中的微透镜阵列采样。
[0005]
尽管用于确定用户的至少一只眼睛的至少一个眼睛像差的现有装置、方法和计算机程序产品具有优势,但仍有改进的空间。特别是,大多数现有的装置和方法不允许自动测量在两个子午面内具有不同偏心度的眼睛像差。针对仅具有单一扫描子午面的系统,必须移动用户的眼睛,以便连续地选择特定子午面中的偏心度,因此,需要附加地注视至少一个
目标。为此目的,必须将这至少一个目标放置在5米或更长的距离处,以避免调节,因此对可以使用该装置和方法的环境施加了限制。而且,多次注视通常会导致测量时间延长,从而增加测量的不确定性,特别是由于配戴着至少一个镜片的用户可能会随着时间移动,使得通常在整个视场上修改眼睛像差。因此,现有的装置和方法仅可以由受过训练的眼科护理专业人员使用。
[0006]
尽管存在需要复杂和/或昂贵光学器件的扫描系统,比如围绕用户的至少一只眼睛的瞳孔的旋转系统、包括至少一个扫描振镜的扫描系统或者上述扫描型夏克哈特曼像差仪,但它们不提供一次性测量的可能性。
[0007]
us 2005/105044 a1披露了可以用于检测在眼镜镜片中和眼睛中的相位像差的波前测量系统和方法。各种实施例包括将调制图案设置在来自眼镜镜片或眼睛的返回光束的路径中,以及使用检测器相对于调制图案在自成像平面处对衍射图案进行成像。对衍射图案进行分析,并将结果用于产生对于描述被测镜片或眼睛中的像差的波前相位特性的表示。披露了用于改进测量结果的照明和处理技术。各种实施例包括适于测量眼镜镜片中以及患者的眼睛中的像差的系统。
[0008]
us 2003/214647 a1披露了一种波前测量系统和一种用于检测从旨在被测量的物体(例如光学系统、人眼等)反射、穿过这些物体透射或在这些物体内被内反射的波前中的相位像差的方法,包括将标线放置在来自物体的返回光束的路径中以及将检测器相对于标线放置在衍射图案自成像平面处。对衍射图案进行分析,并得到了波前相位特性的模型。将一组已知多项式拟合到波前相位梯度,以获得描述物体中或被测波前源内的像差的多项式系数。
[0009]
要解决的问题特别是关于x. wei & l. thibos的披露内容(参见上文),因此本发明的目的是提供一种用于确定用户的至少一只眼睛的至少一个眼睛像差的方法、装置和计算机程序产品,以及用于生产用于用户的至少一只眼睛的至少一个眼镜镜片的相关方法,其至少部分地克服了现有技术的上述问题。
[0010]
本发明的特定目的是能够有效地评估周边散焦,具体是能够在该用户的至少一只眼睛的一次性测量中获得整个眼睛散焦图,尤其是通过自动测量用户的至少一只眼睛在两个子午面内的不同偏心度方面的眼睛像差的。
[0011]
更具体地,因此将期望提供一种用于评估近视进展的诊断工具,尤其是用于个性化地提出近视控制治疗方案,以便能够提供个性化光学镜片,比如多焦点接触镜片或渐变式眼镜或尤其是用于周边散焦管理的近视进展管理(mpm)镜片、或结合了散焦的多镜片段镜片(dims),这是基于对该用户的至少一只眼睛的周边散焦的单次快速测量和/或通过连续监测由该用户的至少一只眼睛的调节或该用户所配戴的至少一个镜片的运动引起的变化。
技术实现要素:
[0012]
此问题通过一种用于确定用户的至少一只眼睛的屈光误差的装置、方法和计算机程序产品以及一种用于生产用于用户的至少一只眼睛的至少一个眼镜镜片的相关方法来解决,这些主题具有独立权利要求的特征。在从属权利要求中列出了可以以孤立方式或以
任意组合的方式实施的优选实施例。
[0013]
如在下文中使用的,术语“具有”、“包括”或“包含”或其任意语法变型以非排他性方式使用。因此,这些术语既可以是指除了由这些术语介绍的特征之外在本上下文中描述的实体中不存在其他特征的情况,也可以是指存在一个或多个其他特征的情况。作为示例,表述“a具有b”、“a包括b”和“a包含b”都可以是指a中除b之外不存在其他要素的情况(即a仅由b组成的情况),也可以是指除b之外实体a中还存在一个或多个其他要素的情况,比如要素c、要素c和要素d、或者甚至其他要素。
[0014]
进一步,如在下文中使用的,术语“优选”、“更优选”、“特别”、“更特别”或类似术语与可选的特征结合使用,而不限制备选的可能性。因此,由这些术语介绍的特征是可选的特征,并不旨在以任何方式限制权利要求的范围。如技术人员将认识到的,本发明可以通过使用替代性特征来执行。类似地,由“在本发明的实施例中”或类似表述介绍的特征旨在是可选的特征,而不受关于本发明的替代性实施例的任何限制,没有关于本发明范围的任何限制,也没有关于以这种方式介绍的特征与本发明的其他特征相结合的可能性的任何限制。
[0015]
在第一方面,本发明涉及一种用于确定用户的至少一只眼睛的至少一个眼睛像差的装置。如上文已经指出的,术语“眼睛像差”是指针对用户的至少一只眼睛确定的理想光学波前的表面与实际光学波前的表面之间的差异。本文中,术语“光学波前”是指与光传播所沿着的光束垂直的表面。除术语“用户”外,还可以应用不同的术语,比如“受试者”、“人员”、“测试人员”或“眼镜配戴者”。
[0016]
根据本发明,该装置至少包括:
‑ꢀ
波前感测单元,用于测量由至少一个光束构成的至少一个光学波前,其中该用户的至少一只眼睛的眼睛像差从该至少一个光学波前来确定;以及
‑ꢀ
至少一个衍射元件,用于在该至少一个光束中在两个子午面内以如下方式产生多重衍射级:这些多重衍射级在该波前感测单元上和在该用户的至少一只眼睛中是空间分离的。
[0017]
本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置可以优选地用于如下更详细描述的用于生产用于用户的至少一只眼睛的眼镜镜片或接触镜片中的至少一种的方法中。基于标准iso 13666:2019(本文中也称为“标准”)第3.5.2节,术语“眼镜镜片”和“接触镜片”各自是指在本发明框架内用于确定和/或矫正用户的至少一只眼睛的至少一个眼睛像差的光学透镜,其中眼镜镜片被携带在用户的眼睛前方,而接触镜片与用户的眼睛直接接触。进一步,术语“眼镜”是指包括两个单独的眼镜镜片和一个眼镜镜架的任意元件,其中每个眼镜镜片都准备好由用户所选择的眼镜镜架接纳。
[0018]
如上文已经进一步描述的,典型人群内的眼睛像差通常包括至少一个二阶球柱镜聚焦误差,也称为“屈光误差”。为了描述被设计用于矫正球柱镜聚焦误差的球柱镜片,可以采用各种方法。如标准第3.6.6节定义的,术语“球柱镜片”是指具有球面和柱面的眼镜镜片。进一步,根据第3.13.1节,球柱镜片被定义为这样一种眼镜镜片,它将平行的近轴光束组合在两条单独的相互垂直的焦线上,由此该眼镜镜片仅在两个子午面内具有顶点屈光力。进一步,根据第3.10.7节,术语“顶点屈光力”被定义为近轴截面的宽度的倒数值。如进一步在第3.2.12节和第3.13.2节中定义的,术语“子午面”涉及眼镜镜片的具有平行于两条焦线的像散效果的两个垂直平面之一。本文中,术语“像散效果”对应于“像散差异”,后者在
第3.13.6节中定义为在第二子午面中的顶点屈光力值与第一子午面中的顶点屈光力值之间的差异。进一步,根据第3.13.7节,“柱镜度”是指这些子午面的屈光值之间的代数差,其中将用作参考的特定子午面的屈光值减去另一子午面的屈光值,而根据第3.13.8节,“柱镜轴位”指的是其顶点屈光率被用作参考的眼镜镜片的子午面的方向。
[0019]
作为替代方案,l. n. thibos、w. wheeler和d. horner (1997), power vectors: an application of fourier analysis to the description and statistical analysis of refractive error [焦度矢量:傅里叶分析在屈光误差的描述和统计分析中的应用], optometry and vision science [验光与视觉科学], 74 (6), s.第367-375页,建议从焦度分布的傅里叶分析的角度来描述球柱镜片。他们指出,熟悉的正弦平方定律自然得到正好有三个傅里叶系数的傅里叶级数表示,这些系数表示薄镜片的自然参数。本文中,常数项对应于平均球镜等效(mse)焦度,而谐波的振幅和相位分别对应于杰克逊交叉柱镜(jcc)镜片的焦度和轴位。以矩形形式表达傅里叶级数可以将任意球柱镜片表示为球镜镜片和两个交叉柱镜(一个在0
°
轴位处,另一个在45
°
轴位处)的总和。这三个组成镜片的焦度可以解释为焦度分布的矢量表示的 (x, y, z) 坐标。球柱镜片的焦度矢量表示可以用于验光数据的数值和图形分析,以解决涉及镜片组合、不同镜片的比较、以及屈光误差的统计分布的问题。
[0020]
优选地,当前呈现的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置可以包括光源。如通常使用的,术语“光源”是指用于产生至少一个光束的单元,其中由光源提供的至少一个光束沿着至少一个光路被引导。如本文中使用的,术语“光”是指可见光谱范围或红外光谱范围中的至少一者内的电磁辐射。如通常使用的,术语“可见光谱范围”是指波长为380 nm至780 nm的电磁辐射,而术语“红外光谱范围”是指波长在780 nm至1000
ꢀµ
m以上的电磁辐射,其中该可见光谱范围或该“近红外光谱范围”(是指波长在780 nm至1.5
ꢀµ
m以上的电磁辐射)可能是特别优选的。进一步,术语“光束”涉及呈至少一个光线形式的光的传播,其中至少一个光线的传播方向在本文中通常用术语“光路”表示,其中该光路可以被至少一个光学元件(特别是选自镜、分束器或衍射元件,比如光栅)修改。如上文进一步描述的,术语“光学波前”是指垂直于至少一个光束的传播方向的表面。
[0021]
本文中,光源通常可以选自任何已知的单色源。如通常使用的,术语“单色”是指选自上述光谱范围之一的单一波长或小波长带宽。为此目的,可以优选地使用激光二极管,特别是由于其简单、容易获得和低成本。作为替代方案,也可以有利地使用多色光源与可调谐或固定带宽滤波器的组合,或超连续源与可调谐或固定带宽滤波器的组合,其中术语“超连续”是指具有小带宽的激光,其在通过非线性光学介质转换之后表现出扩展的带宽,其中可以通过使用可调谐带宽滤波器来选择小带宽的期望波长,因此允许改变周边光束的衍射角和效率,如下文更详细地描述的。
[0022]
进一步,用于确定用户的至少一只眼睛的至少一个眼睛像差的装置可以优选地包括至少一个光学元件,该至少一个光学元件用于将该至少一个光束引导到该用户的至少一只眼睛并且引导到波前感测单元。本文中,该至少一个光学元件可以优选地是或包括如下更详细描述的至少一个光学中继系统与分束器的组合。如通常使用的,术语“分束器”涉及特定种类的光学元件,该光学元件用于将光束分为至少两个、优选恰好两个部分光束。本文中,该分束器通常可以选自任何已知的分束器,特别是选自具有介电涂层的玻璃板、分色
镜、薄膜分束器、分束器板或偏振分束器(比如沃拉斯顿棱镜或偏振光栅)。然而,其他种类的分束器可能也是可行的。为了本发明的目的,该分束器可以以如下方式放置在该至少一个光路中:它可以将由该光源提供的该至少一个光束分成至少两个部分光束,其中至少一个部分光束可以被引导到该用户的至少一只眼睛,并且在被该用户的至少一只眼睛反射之后从该用户的眼睛被接收,尤其被引导朝向波前感测单元,如下文更详细描述的。
[0023]
根据本发明,用于确定用户的至少一只眼睛的至少一个眼睛像差的装置包括波前感测单元。如通常使用的,术语“波前感测单元”是指一种用于测量光学波前的像差的光学传感器,其中该术语通常适用于不需要与不具有像差的参考光束进行干涉的光学传感器。本文中,该波前感测单元可以优选地选自以下中的至少一个:夏克哈特曼波前传感器、用于测量偏心波前的至少一个点扩散函数的相机、圆形小透镜阵列像差计、金字塔波前传感器、基于相位元件的波前传感器、光线追踪像差计。然而,其他种类的波前感测单元可能也是可行的。
[0024]
如通常使用的,术语“夏克哈特曼波前传感器”是指特定类型的波前感测单元,该波前感测单元包括单独小透镜的阵列(其通常用术语“小透镜”表示)和二维光学检测器(比如ccd阵列、cmos阵列或四元单元),其中,在小透镜均匀照明时,入射的光学波前在每个小透镜上的积分梯度与由每个单独小透镜产生的位移成比例。换言之,入射光学波前的相位像差因此可以由对应于这些单独小透镜的一组局部倾斜来近似,其中对应于这些小透镜的倾斜也可以用术语“偏心度”来表示。通过以这种方式借助该小透镜阵列对入射光学波前进行采样,入射光学波前因此可以通过测量在该小透镜阵列内每个单独小透镜的局部偏心度来至少部分地、优选地完全地重构。
[0025]
根据本发明,该用户的至少一只眼睛的眼睛像差是根据由该波前感测单元(优选地由夏克哈特曼波前传感器)测量的该至少一个光学波前来确定。本文中,该用户的至少一只眼睛的眼睛像差可以优选地通过测量该至少一只眼睛的散焦或在该至少一只眼睛的视网膜场上的等效球镜度中的至少一者来确定。优选地,该眼睛像差可以在该波前感测单元(优选地夏克哈特曼波前传感器)的表面上产生的所有至少九个光点中进行测量,如下文更详细描述的。结果,最终可以获得表示在该至少一只眼睛中该视网膜场的眼睛像差的眼睛散焦图。然而,甚至更优选的是,该眼睛散焦图可以包括在该两个子午面内在该视网膜场上已经针对这至少九个光点产生的值的插值。如通常使用的,术语“图”是指物体的二维表示,使得术语“眼睛散焦图”涉及在该用户的至少一只眼睛的视网膜场上该眼睛像差的局部值的二维表示,其中,该二维表示的两条轴线由这两个子午面提供。
[0026]
特别是根据本发明,用于确定用户的至少一只眼睛的至少一个眼睛像差的装置包括至少一个衍射元件。如通常使用的,术语“衍射元件”是指一种用于使入射光束发生衍射的光学元件,由此在该至少一个光束中产生多重衍射级。特别是,该至少一个衍射元件可以选自光栅、全息图或数字光调制元件中的至少一个;然而,另一种类的衍射元件可能也是可行的。如通常使用的,术语“光栅”涉及一种具有周期性结构的光学元件,该光学元件用于使入射光束分裂和发生衍射,由此在该至少一个光束中产生多重衍射级。如进一步通常使用的,术语“全息图”或“体积全息图”是指一种具有记录在物理介质上的干涉图案的光学元件。特别地,全息图可以通过以数字方式对至少两个波前进行建模和叠加而由计算机产生,由此所得的数字图像随后被印在该物理介质上。
[0027]
如本文中进一步使用的,术语“数字光调制元件”是指一种具有多个可单独控制的光学元件的被设计用于调制入射光束的光学装置。优选地,该数字光调制元件可以选自空间光调制器或数字微镜单元中的至少一个。如通常使用的,术语“空间光调制器”或“slm”涉及一种被配置为以电子和/或光学方式将强度图案印在入射光束上的光学装置。结果,该空间光调制器典型地可以用于产生至少一个光栅。进一步,术语“数字微镜装置”或“dmd”是指一种被配置为将数字图像调制到光束上的光学装置。为此目的,该数字微镜装置具有一种包括以矩阵形式布置的多个倾斜微镜的布置,该布置的边缘长度在微米范围内,每个微镜可通过使用静电场单独寻址。以这种方式,入射光束可以被分成单独像素,并且随后被逐像素地反射。然而,其他类型的数字光调制元件是可行的。
[0028]
如进一步通常使用的,术语“多重衍射级”是指将入射光束分成多个衍射光束的一种方式,其中每个衍射光束属于选自单一第零衍射级、两个第一衍射级之一、两个第二衍射级之一、或更高衍射级之一中的特定衍射级,其中特定衍射级的可测量强度取决于每个衍射级的单独衍射效率。在实践中,光束的多重衍射级通常可以仅包括第零衍射级和第一衍射级,优选地补充有第二衍射级。然而,可以附加地包括第三衍射级或第四衍射级的光束可能也是可行的。因此,在特别优选的实施例中,多重衍射级可以在每个子午面内至少包括第零衍射级和两个第一衍射级,由此取决于多重衍射级的单独衍射效率,可以在该波前感测单元的表面上在两个子午面内产生至少九个光点(优选地九至二十五个光点)。
[0029]
优选地,该光栅可以选自透射光栅或反射光栅中的至少一个。本文中,透射光栅可能是有利的,因为它允许在将光栅放置到该至少一个光路中时提供更多的自由度。进一步,该至少一个光栅可以优选地选自衍射光栅或偏振光栅中的至少一个。与术语“衍射光栅”(是指如上所述的一般光栅)不同,术语“偏振光栅”是指特定类型的包括非去偏振型偏振元件的光栅,该非去偏振型偏振元件用于以周期性方式改变透射光的偏振状态,由此获得透射光的偏振相关衍射。为了能够使用两个相继的偏振光栅,在这两个相继的偏振光栅之间放置至少一个去偏振器或线性偏振器。
[0030]
为了本发明的目的,该至少一个衍射元件以如下方式放置在该至少一个光路中:该至少一个光束中所期望的多重衍射级在两个子午面内以如下方式产生:使得多重衍射级在该至少一只眼睛中(尤其是在该用户的至少一只眼睛的视网膜上)和在该光学波前感测单元的表面上是空间上分离的,分离为单独的光点。如上文已经定义的,术语“子午面”涉及镜片的具有平行于两条焦线的像散效果的两个垂直平面之一。如进一步通常使用的,术语“光点”是指光束以产生空间有限区域的方式在表面上的撞击。其结果是,该至少一个光束的多重衍射级可以通过其相应光点的位置彼此容易地区分,具体是通过该夏克哈特曼波前传感器的单独小透镜。关于进一步的细节,可以参考以下示例性实施例的描述。
[0031]
为了最小化(优选地完全避免)在该波前感测单元的表面上的光点之间的串扰,特别是在该夏克哈特曼波前传感器中对应于单独小透镜的光点之间的串扰,优选相应地调整该波前感测单元的参数,特别是该夏克哈特曼波前传感器中的小透镜的参数。一般而言,单独小透镜焦距的高值有利于借助于指示最大可测量角度的等式(1)对高偏心度进行采样其中d是小透镜的直径,是衍射受限光点大小(艾里斑)的直径,以及f是小透镜的
焦距。本文中,参数的确切值取决于夏克哈特曼波前传感器本身、相应的二维光学检测器(比如ccd阵列、cmos阵列或四元单元)和小透镜。由于夏克哈特曼波前传感器可以特别适用于测量高偏心度值,因此可以表现出高动态范围的夏克哈特曼波前传感器可能是优选的,然而这可能导致较低的精度,其中通过选择较小的光学检测器像素大小,可以在特定程度上抵消较低的精确度。关于夏克哈特曼波前传感器的参数的优选示例,可以参考以下示例性实施例的描述。
[0032]
在特别优选的实施例中,用于在该至少一个光束中在两个子午面内产生所期望的多重衍射级的该至少一个衍射元件(特别是至少一个光栅)可以包括至少一个单一衍射元件(特别是至少一个单一光栅),其中该至少一个衍射元件(特别是该单一光栅)提供二维光栅,该二维光栅用于在两个子午面内产生多重衍射级。为此目的,该单一衍射元件(特别是该单一光栅)的二维光栅可以以两个单独一维结构的形式来提供,这些结构以≠ n
·
180
°
的角度彼此重叠,优选以正交方式重叠,其中n是自然数,包括0,由此可以获得矩形光束图案,其中该二维光栅的衍射效率等于两个一维衍射效率的乘积。如本文中使用的,术语“正交”涉及90
°ꢀ±ꢀ
45
°
、优选90
°ꢀ±ꢀ
15
°
、更优选90
°ꢀ±ꢀ5°
、特别是90
°ꢀ±ꢀ1°
、尤其是90
°ꢀ±ꢀ
0.1
°
的角度。然而,另外的其他角度可能也是可行的。
[0033]
在优选的替代性实施例中,用于在该至少一个光束中在两个子午面内产生所期望的多重衍射级的该至少一个衍射元件(特别是该至少一个光栅)可以包括至少两个单独的衍射元件(特别是至少两个单独的光栅),其中每个单独的衍射元件(特别是每个单独光栅)同样具有一维光栅,该一维光栅用于在一个子午面内产生多重衍射级,其中该至少两个单独的衍射元件(特别是该至少两个单独光栅)可以以使得两个子午面相对于彼此正交布置的方式来布置。关于术语“正交”,可以参考上文的定义。
[0034]
在另一优选的替代性实施例中,用于在该至少一个光束中在两个子午面内产生所期望的多重衍射级的该至少一个衍射元件(特别是该至少一个光栅)可以包括至少一个单一衍射元件(特别是至少一个单一光栅),然而其中该单一光栅提供了一维光栅,该一维光栅用于在一个子午面内产生多重衍射级,其中该单一光栅用于进行旋转,其方式为使得在两个子午面内提供多重衍射级。取决于衍射元件的类型,该单一光栅可以以机械、电子或光学方式围绕旋转轴线旋转。为了机械地使该单一光栅围绕旋转轴线旋转,可以使用已知的旋转单元。
[0035]
在本发明的特定实施例中,该装置可以包括至少两个衍射元件,特别是至少两个光栅,尤其是至少两个二维光栅或至少三个一维光栅,具体地用于在该波前感测单元处产生多于一个光学波前,这可以有利地用于与该用户的至少一只眼睛的视网膜场相关的值的采样。
[0036]
在本发明的另一优选实施例中,该至少一个衍射元件(特别是该至少一个光栅)可以被放置在入射光瞳平面中。如通常使用的,术语“入射光瞳”是指透过至少一个镜片的正面看到的物理孔径光阑的光学图像,而“入射光瞳平面”是指垂直于该入射光瞳的光轴的平面。在此特别优选的实施例中,用于将该至少一个光束引导到该用户的至少一只眼睛和该波前感测单元的该至少一个光学元件可以优选地包括光学中继系统,该光学中继系统可以尤其用于将该入射光瞳平面中继到该用户的眼睛的瞳孔上。本文中,术语“光学中继系统”是指至少两个光学元件的组合,该组合用于将光学平面传递到不同的位置。作为示例,在入
射光瞳平面中显示的信息因此可以被传递以显示在该用户的眼睛的瞳孔上。优选地,该光学中继系统可以包括一对固定的同轴安装的广角远心透镜,其中的至少一个透镜可以由不同的光学元件(比如球面镜)代替。更具体地,该光学中继系统可以包括光学中继望远镜,本文中也仅用术语“望远镜”表示,其中该望远镜可以具有-至少两个单独的光学透镜或至少一个包括至少两个独立的光学透镜的组件;或-至少一个球面镜,以及o至少一个光学透镜,或者o至少一个包括至少两个单独的光学透镜的组件;或-至少两个球面镜。
[0037]
作为另一替代方案,用于将光瞳平面中继到波前感测单元的表面的该光学中继系统可以包括轴锥镜元件,该轴锥镜元件可以优选地放置在该望远镜的中间像平面中。如通常使用的,术语“轴锥镜元件”是指一种具有锥形表面的光学透镜,由此光束(特别是激光束)可以转换成环形分布。因此,该轴锥镜元件侧向移动对应于周边光束的光瞳。其结果是,在波前感测单元的表面上产生至少九个不同的区域,其中每个不同的区域包括一个单独的光点,这因此可以单独进行处理而在每个小透镜下没有多个光点。
[0038]
在优选实施例中,该分束器可以以如下方式放置:用于将该入射光瞳平面中继到用户的眼睛的瞳孔上的该相同光学中继系统也用于将入射光瞳平面中继到该波前感测单元的表面,因此得到特别简单且成本更低的装置。如本文中使用的,术语“相同”是指用于至少两个不同目的(具体是上文所述的两个不同用途)的单一光学中继系统。使用该相同光学中继系统将入射光瞳平面中继到用户的眼睛的瞳孔上并将入射光瞳平面中继到波前感测单元的表面特别地与us2005/105044a1形成对比,该文献披露了用于将入射光瞳平面中继到用户的至少一只眼睛的瞳孔平面上的第一光学中继系统,以及用于将该用户的至少一只眼睛的瞳孔平面中继到波前感测单元的表面平面的单独的第二光学中继系统。作为替代方案,该分束器也可以被放置得靠近眼睛,然而为此目的,该装置包括另一光学中继系统,该另一光学中继系统用于将入射光瞳平面中继到波前感测单元的表面。
[0039]
在另一优选实施例中,根据本发明的装置可以进一步包括附加光路,其中用于用户的至少一只眼睛的注视目标可以被放置在该附加光路中,其中该注视目标的焦点可以优选地通过使用可调谐透镜、相位调制器或巴达尔透镜中的至少一个来调整。如通常使用的,术语“巴达尔透镜”是指包括至少一个用于在相同的角大小下显示目标的透镜的光学元件。在此另一优选实施例中,眼睛散焦图可以在用户的至少一只眼睛的调节相位期间来确定。因此,该眼睛散焦图的确定可以优选地实时执行,这与x.wei&l.thibos(参见上文)相比是有利的,后者使用了至少一个在测量期间引起时间延迟的扫描系统。
[0040]
替代地或附加地,可设想关于根据本发明的装置的其他实施例。
[0041]
在另一方面,本发明涉及一种用于确定用户的至少一只眼睛的至少一个眼睛像差的方法,优选地是通过使用本文中别处披露的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置。特别是,该方法可以用于以相继方式单独地确定用户的双眼的眼睛像差。根据本发明的方法包括以下步骤a)和步骤b),其优选地按步骤b)和步骤a)的顺序执行,其中,这些步骤可以至少部分地同时执行。此外,可以附加地执行本文中披露或未披露的其他步骤。本方法的步骤如下:
a) 测量由至少一个光束构成的至少一个光学波前,其中该用户的至少一只眼睛的眼睛像差从该至少一个光学波前来确定;以及b) 在该至少一个光束中在两个子午面内以如下方式产生多重衍射级:多重衍射级在波前感测单元上和在该用户的至少一只眼睛中是空间分离的。
[0042]
通常,根据本发明的方法可以以手动的方式来执行,其中受过训练的眼睛护理专业人员可以通过使用适当的装置来执行所指示的步骤,优选地通过使用如本文中别处披露的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置。然而,在优选实施例中,根据本发明的方法可以是计算机实施的方法。如通常使用的,术语“计算机实施的方法”是指涉及可编程设备(具体是计算机)、计算机网络或携带计算机程序的可读介质的方法,其中通过使用至少一个计算机程序来执行该方法的至少一个步骤,特别是步骤d)。为此目的,该计算机程序代码可以提供在数据存储介质或单独的装置上,比如光学存储介质,例如提供在光盘上、直接提供在计算机或数据处理单元(特别是移动通信装置,具体是智能手机或平板电脑)上,或经由网络(比如内部网络或因特网)提供。因此,本方法可以在为此目的而配置的可编程单元上执行,比如通过提供特定的计算机程序。
[0043]
本文中,可以沿着至少一个光路提供至少一个光束,优选地通过使用如上文或下文更详细描述的光源。
[0044]
进一步,该至少一个光束可以被引导到该用户的至少一只眼睛和该波前感测单元。为此目的,该至少一个光束可以优选地被分成至少两个部分光束,尤其是通过使用如上文或下文更详细描述的分束器,其中至少一个部分光束被引导到用户的眼睛并从该用户的眼睛被接收。然而,实际上没有必要使用分束器,因为根据本发明的装置可以在没有该分束器的情况下工作。作为示例,该光束可以在轴线上或相对于光轴以非常小的角度进入用户的至少一只眼睛,前提是波前感测单元不对眼睛的轴上像差进行采样。
[0045]
根据步骤a),优选地通过使用波前感测单元(优选地夏克哈特曼波前传感器)来测量由用户的眼睛提供的该光束构成的至少一个光学波前,如上文或下文更详细地描述的,其中,该用户的至少一只眼睛的眼睛像差从该至少一个光学波前来确定。
[0046]
根据步骤b),在该至少一个光束中在两个子午面内的多重衍射级以如下方式来产生:多重衍射级在波前感测单元上(尤其是在波前感测单元的表面上)和在用户的至少一只眼睛中是空间分离的。为此目的,可以优选地使用该至少一个衍射元件(特别是该至少一个光栅),该至少一个衍射元件用于在该至少一个光束中在两个子午面内产生多重衍射级,如上文或下文更详细地描述的。
[0047]
在另一方面,本发明涉及一种计算机程序产品,该计算机程序产品包括用于使根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置执行根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的方法的步骤的指令。为此目的,计算机程序可以包括借助于计算机程序代码提供的指令,这些指令能够执行本文中别处描述的方法的任何或所有步骤,特别是步骤a),并且因此当在计算机或数据处理单元上实施时确定用户的至少一只眼睛的至少一个眼睛像差。本文中,该计算机程序代码可以提供在数据存储介质或单独的装置上,比如光学存储介质,例如提供在光盘上、直接提供在计算机或数据处理单元(特别是移动通信装置,具体是智能手机或平板电脑)上,或经由网络(比如内部网络或因特网)提供。
[0048]
在另一方面,本发明涉及一种用于生产用于用户的至少一只眼睛的至少一个眼镜镜片的方法,其中该眼镜镜片的生产包括处理镜片毛坯,其中该镜片毛坯的处理是基于被配置为补偿该用户的至少一只眼睛的至少一个眼睛像差的指令,其中确定该用户的至少一只眼睛的眼睛像差包括根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的方法的步骤。
[0049]
关于涉及用于确定用户的至少一只眼睛的至少一个眼睛像差的方法、计算机程序产品、或用于生产用于用户的至少一只眼睛的至少一个眼镜镜片的方法的其他细节,可以参考本文中别处披露的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置。
[0050]
当确定用户的至少一只眼睛的至少一个眼睛像差时,根据本发明的装置、计算机程序产品和方法相对于现有技术表现出各种优点。特别是,该装置和方法允许通过使用简单且易于使用的办法,特别是在无需受过训练的眼睛护理专业人员(比如验光师或眼科医生)的情况下,在一次性评估中生成用户的至少一只眼睛的整个眼睛散焦图。因此,该装置和方法为有效评估用户的至少一只眼睛的周边散焦提供了有力的工具,具体是在一次性测量中获得该用户的至少一只眼睛的整个眼睛散焦图,尤其是通过自动测量关于在两个子午面内的不同偏心度方面的眼睛像差,这结合了容易应用性和短的测试持续时间。本文中,该装置的实施方式以及该软件的纳入被设计用于使该工具甚至适用于未受过训练的用户或人员。
[0051]
因此,该装置和该方法提供一种用于评估近视进展的诊断工具,尤其是用于个性化地提出近视控制治疗方案,以便能够提供个性化光学镜片,比如多焦点接触镜片或渐变式眼镜或尤其是用于周边散焦管理的近视进展管理(mpm)镜片、或结合了散焦的多镜片段镜片(dims),这是基于对用户的至少一只眼睛的周边散散焦的单次快速测量和/或通过连续监测由该用户的至少一只眼睛的调节或该用户所配戴的至少一个镜片的运动引起的变化。
[0052]
总之,在本发明的范围内特别优选的是以下实施例:实施例1. 一种用于确定用户的至少一只眼睛的眼睛像差的装置,该装置包括:
‑ꢀ
波前感测单元,用于测量由至少一个光束构成的至少一个光学波前,其中该用户的至少一只眼睛的眼睛像差从该至少一个光学波前来确定;
‑ꢀ
至少一个衍射元件,用于在该至少一个光束中在两个子午面内以如下方式产生多重衍射级:这些多重衍射级在该波前感测单元上和在该用户的至少一只眼睛中是空间分离的。
[0053]
实施例2. 根据前一实施例所述的装置,其中,该至少一个衍射元件选自至少一个单一衍射元件。
[0054]
实施例3. 根据前一实施例所述的装置,其中,该单一衍射元件提供了用于在所述两个子午面内产生该多重衍射级的二维光栅。
[0055]
实施例4. 根据前述两个实施例中任一个所述的装置,其中,该单一衍射元件提供了用于在一个子午面内产生该多重衍射级的一维光栅。
[0056]
实施例5. 根据前一实施例所述的装置,其中,该单一衍射元件用于进行旋转,其方式为在所述两个子午面内提供该多重衍射级。
[0057]
实施例6. 根据前述实施例中任一个所述的装置,其中,该至少一个衍射元件提供
了至少两个单独光栅。
[0058]
实施例7. 根据前一实施例所述的装置,其中,每个单独光栅提供了用于在一个子午面内产生该多重衍射级的一维光栅。
[0059]
实施例8. 根据前一实施例所述的装置,其中,所述两个子午面相对于彼此正交地布置。
[0060]
实施例9. 根据前一实施例所述的装置,其中,术语“正交”涉及90
°ꢀ±ꢀ
45
°
、优选90
°ꢀ±ꢀ
15
°
、更优选90
°ꢀ±ꢀ5°
、特别是90
°ꢀ±ꢀ1°
、尤其是90
°ꢀ±ꢀ
0.1
°
的角度。
[0061]
实施例10. 根据前述实施例中任一个所述的装置,包括至少两个衍射元件,其中该至少两个衍射元件用于在该用户的眼睛中和在该波前感测单元上产生多于一个光学波前。
[0062]
实施例11. 根据前一实施例所述的装置,其中,该至少一个衍射元件选自光栅、全息图或数字光调制元件中的至少一个。
[0063]
实施例12. 根据前一实施例所述的装置,其中,该至少一个光栅选自衍射光栅或偏振光栅中的至少一个。
[0064]
实施例13. 根据前一实施例所述的装置,其中,至少一个去偏振器或线性偏振器被放置在两个偏振光栅之间。
[0065]
实施例14. 根据前述三个实施例中任一个所述的装置,其中,该至少一个光栅选自透射光栅或反射光栅中的至少一个。
[0066]
实施例15. 根据前述四个实施例中任一个所述的装置,其中,该至少一个全息图是体积全息图。
[0067]
实施例16. 根据前述五个实施例中任一个所述的装置,其中,该至少一个数字光调制元件选自空间光调制器或数字微镜单元中的至少一个。
[0068]
实施例17. 根据前述实施例中任一个所述的装置,进一步包括至少一个光学元件,用于将该至少一个光束引导到该用户的至少一只眼睛和该波前感测单元。
[0069]
实施例18. 根据前一实施例所述的装置,其中,该至少一个光学元件包括分束器,该分束器用于将该至少一个光束分为至少两个部分光束,其中这些部分光束中的至少一个被引导到该用户的至少一只眼睛。
[0070]
实施例19. 根据前述两个实施例中任一个所述的装置,其中,该至少一个衍射元件被放置在入射光瞳平面中。
[0071]
实施例20. 根据前一实施例所述的装置,其中,该至少一个光学元件包括光学中继系统,该光学中继系统用于将该入射光瞳平面中继到该用户的至少一只眼睛的瞳孔平面上。
[0072]
实施例21. 根据前一实施例所述的装置,其中,该光学中继系统包括以下中的至少一个:具有至少两个单独光学透镜的望远镜或至少一个包括至少两个单独光学透镜的组件,或具有至少一个球面镜和至少一个光学透镜或至少一个包括至少两个单独光学透镜的组件,或具有至少两个球面镜。
[0073]
实施例22. 根据前一实施例所述的装置,进一步包括轴锥镜元件,用于将该用户的至少一只眼睛的瞳孔平面中继到该波前感测单元。
[0074]
实施例23. 根据前一实施例所述的装置,其中,该轴锥镜元件优选地被放置在该
望远镜的中间像平面中。
[0075]
实施例24. 根据前述三个实施例中任一个所述的装置,其中,该分束器以如下方式放置:使得该相同光学中继系统用于将该入射光瞳平面中继到该波前感测单元的表面。
[0076]
实施例25. 根据前述四个实施例中任一个所述的装置,其中,该分束器被放置得靠近该用户的至少一只眼睛,其中,该装置包括用于将该入射光瞳平面中继到该波前感测单元的表面的另一光学中继系统。
[0077]
实施例26. 根据前述实施例中任一个所述的装置,其中,该波前感测单元选自以下中的至少一个:夏克哈特曼波前传感器、用于测量偏心波前的至少一个点扩散函数的相机、圆形小透镜阵列像差计、金字塔波前传感器、基于相位元件的波前传感器、光线追踪像差计。
[0078]
实施例27. 根据前述实施例中任一个所述的装置,进一步包括用于提供至少一个光束的光源。
[0079]
实施例28. 根据前一实施例所述的装置,其中,该光源是或包括单色光源、或多色光源与可调谐或固定带宽滤波器的组合、或超连续源与可调谐或固定带宽滤波器的组合。
[0080]
实施例29. 根据前述实施例中任一个所述的装置,其中,该单色光源是或包括激光二极管。
[0081]
实施例30. 根据前述实施例中任一个所述的装置,进一步包括至少一个附加光路,其中注视目标和瞳孔相机中的至少一个被放置在该附加光路中。
[0082]
实施例31. 根据前一实施例所述的装置,其中,该注视目标的焦点通过使用以下中的至少一个来调整:可调谐透镜、相位调制器或巴达尔透镜。
[0083]
实施例32. 一种用于确定用户的至少一只眼睛的眼睛像差的方法,该方法包括以下步骤:a) 测量由该至少一个光束构成的至少一个光学波前,其中该用户的至少一只眼睛的眼睛像差从该至少一个光学波前来确定;b) 在该至少一个光束中在两个子午面内以如下方式产生多重衍射级:多重衍射级在波前感测单元上和在该用户的至少一只眼睛中是空间分离的。
[0084]
实施例33. 根据前一实施例所述的方法,其中,提供二维光栅的单一衍射元件在所述两个子午面内产生该多重衍射级。
[0085]
实施例34. 根据前述涉及方法的实施例中任一个所述的方法,其中,提供一维光栅的至少一个单一衍射元件在一个子午面内产生该多重衍射级,并且进行旋转,其方式为在所述两个子午面内提供该多重衍射级。
[0086]
实施例35. 根据前述涉及方法的实施例中任一个所述的方法,其中,至少两个单独的光学衍射元件在一个子午面内产生该多重衍射级,其中该至少两个子午面相对于彼此正交地布置。
[0087]
实施例36. 根据前一实施例所述的方法,其中,术语“正交”涉及90
°ꢀ±ꢀ
45
°
、优选90
°ꢀ±ꢀ
15
°
、更优选90
°ꢀ±ꢀ5°
、特别是90
°ꢀ±ꢀ1°
、尤其是90
°ꢀ±ꢀ
0.1
°
的角度。
[0088]
实施例37. 根据前述涉及方法的实施例中任一个所述的方法,其中,该至少两个衍射元件产生多于一个光学波前。
[0089]
实施例38. 根据前述涉及方法的实施例中任一个所述的方法,其中,该用户的至
少一只眼睛的眼睛像差是通过测量该用户的至少一只眼睛的散焦或在该用户的至少一只眼睛的视网膜场上的等效球镜度中的至少一者来确定,由此获得表示在该用户的至少一只眼睛中的视网膜场的眼睛像差的眼睛散焦图。
[0090]
实施例39. 根据前述涉及方法的实施例中任一个所述的方法,其中,该多重衍射级在每个子午面内至少包括第零衍射级和至少两个第一衍射级,其中在该波前感测单元上在所述两个子午面内产生至少九个光点。
[0091]
实施例40. 根据前一实施例所述的方法,其中,取决于这些多重衍射级的单独衍射效率,在该波前感测单元上在所述两个子午面内产生九至二十五个光点。
[0092]
实施例41. 根据前述三个实施例中任一个所述的方法,其中,该眼睛散焦图包括以下中的至少一个:与在该波前感测单元上在所述两个子午面内产生的所述至少九个光点相关的值,或内插在该波前感测单元上产生的所述至少九个光点之间的值。
[0093]
实施例42. 根据前述涉及方法的实施例中任一个所述的方法,进一步包括以下步骤:
‑ꢀ
将该至少一个光束引导到该用户的至少一只眼睛和该波前感测单元。
[0094]
实施例43. 根据前述涉及方法的实施例中任一个所述的方法,进一步包括以下步骤:
‑ꢀ
沿着至少一个光路提供至少一个光束。
[0095]
实施例44. 根据前述涉及方法的实施例中任一个所述的方法,进一步包括附加光路,其中注视目标和瞳孔相机中的至少一个被放置在该附加光路中。
[0096]
实施例45. 根据前一实施例所述的方法,其中,该注视目标的焦点通过使用以下中的至少一个来调整:可调谐透镜、相位调制器或巴达尔透镜。
[0097]
实施例46. 根据前述两个实施例中任一个所述的方法,其中,该眼睛散焦图在该用户的至少一只眼睛的调节期间来测量。
[0098]
实施例47. 根据前一实施例所述的方法,其中,该眼睛散焦图是实时地测量的。
[0099]
实施例48. 一种计算机程序产品,该计算机程序产品包括指令,所述指令用于使根据前述涉及装置的实施例中任一个所述的装置执行根据前述涉及方法的实施例中任一个所述的用于确定用户的至少一只眼睛在至少两个子午面内的眼睛像差的方法的步骤。
[0100]
实施例49. 一种用于生产用于用户的至少一只眼睛的至少一个眼镜镜片的方法,其中,该眼镜镜片的生产包括处理镜片毛坯,其中该镜片毛坯的处理是基于被配置为补偿该用户的至少一只眼睛的至少一个眼睛像差的指令,其中用于确定该用户的至少一只眼睛的眼睛像差的方法包括根据前述涉及用于确定用户的至少一只眼睛的眼睛像差的方法的实施例中任一个所述的方法的步骤。
附图说明
[0101]
优选地结合从属权利要求,在优选实施例的后续描述中更详细地披露本发明的进一步的可选特征和实施例。其中,如本领域技术人员将认识到的,各个可选特征可以以孤立方式以及任意可行的组合方式来实现。这里强调,本发明的范围不受优选实施例的限制。
[0102]
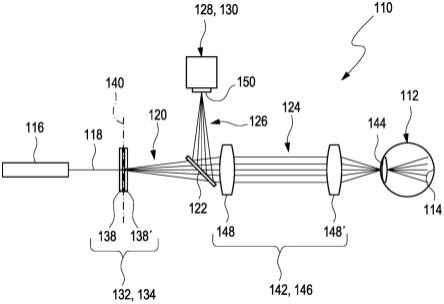
在附图中:图1展示了根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装
置的优选实施例;图2展示了根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置的另一优选实施例;图3展示了根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置的另一优选实施例;图4展示了根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的装置的另一优选实施例;图5展示了指示不同衍射级上的能量散布的图表;图6展示了指示在夏克哈特曼波前传感器上多重衍射级的空间分离的图表;以及图7展示了根据本发明的用于确定用户的至少一只眼睛的至少一个眼睛像差的方法的优选实施例。
具体实施方式
[0103]
图1展示了用于确定用户的至少一只眼睛112的至少一个眼睛像差的装置110的优选实施例,其中眼睛112包括视网膜114。然而在下文中,为了简单起见,附图和描述仅涉及用户的一只眼睛112。如这里示意性所示的,装置110可以包括光源116,优选为单色源,最优选为激光二极管,特别是由于其简单性、易获得性和相当低的成本。然而,如上文已经指出的,不同类型的光源可能也是可行的。本文中,光包括优选在可见光谱范围或近红外光谱范围中的至少一者内的电磁辐射,因此具有380 nm至1.5
ꢀµ
m的波长。相应地,光源116用于产生光束118,该光束沿着光路120被引导。本文中,光束118描述了呈光线形式的光的传播,其中光线的传播方向通常被表示为光路120。进一步,与光线的传播方向垂直的表面称为光学波前(这里未示出)。
[0104]
如图1进一步所示的,装置110可以进一步包括分束器122,该分束器可以选自任何已知的分束器,特别是选自具有介电涂层的玻璃板、分色镜、薄膜分束器、分束器板或偏振分束器(比如沃拉斯顿棱镜或偏振光栅)。然而,不同类型的分束器可能也是可行的。如图1示意性所示的,分束器122可以优选地以如下方式放置在光路120中:它可以将由光源116提供的光束118分成两个部分光束124、126。其结果是,第一部分光束124被引导到用户的眼睛112,并且在被用户的眼睛112反射之后从用户的眼睛112接收,尤其是经由第二部分光束126被引导朝向波前感测单元128。然而,如上文更详细地解释的,装置110可以包括没有分束器122的其他实施例。
[0105]
如图1进一步所示的,装置110进一步包括波前感测单元128,特别是夏克哈特曼波前传感器130。然而,另一种类的波前感测单元(特别是用于测量偏心波前的至少一个点扩散函数的相机、圆形小透镜阵列像差计、金字塔波前传感器、基于相位元件的波前传感器、或光线追踪像差计)可能也是可行的。本文中,波前感测单元128(特别是夏克哈特曼波前传感器130)用于测量光学波前的像差,而不需要与不具有像差的参考光束发生干涉。特别是,夏克哈特曼波前传感器130具有单独小透镜阵列(这里未示出)、二维光学检测器,比如ccd阵列、cmos阵列或如图6所示的四元单元。相应地,用户的眼睛112的眼睛像差从由波前感测单元128(特别是夏克哈特曼波前传感器130)测得的光学波前来确定。
[0106]
如图1进一步所示的,装置110进一步包括衍射元件。在本文中使用的示例性实施
例中,衍射元件是光栅132;然而,替代地或附加地,使用全息图(比如体积全息图)和/或数字光调制元件(比如空间光调制器(slm)或数字微镜单元(dmd))可能对于本发明的目的也是可行的。
[0107]
在图1、图2和图4的示例性实施例中,光栅是透射光栅134,因此允许光束118横穿光栅132。然而,如图3示意性所示的,反射光栅136可能也是可行的。如上所述,光栅132可以进一步从衍射光栅或偏振光栅中选择。由于横穿了透射光栅134或者替代地被反射光栅136反射,在光束118中产生了如图5和图6示意性所示的多重衍射级。本文中,光栅132以如下方式放置在至少一个光路118中:光束118中所期望的多重衍射级在两个子午面内产生,使得多重衍射级在空间上被分离为在用户的眼睛112中(尤其是在视网膜114上)和在如图5和图6进一步所示的光学波前感测单元上的单独光点。
[0108]
如图1进一步所示的,用于在该至少一个光束118中在两个子午面内产生所期望的多重衍射级的光栅132包括两个单独光栅138、138’,每个光栅具有用于在一个子午面内产生多重衍射级的一维光栅,其中这两个单独光栅138、138’彼此正交地布置以便在该至少一个光束118中在两个子午面内产生所期望的多重衍射级。关于术语“正交”,可以参考上文的定义。作为替代方案,也可以使用单一光栅(这里未示出),其中具有用于在一个子午面内产生多重衍射级的一维光栅的该单一光栅可以旋转,其方式为使得在两个子午面内提供多重衍射级。作为另一替代方案,单一光栅可以是二维的,该二维光栅用于在两个子午面内产生多重衍射级。如图1示意性所示的,光栅132可以优选地被放置在入射光瞳平面140中。
[0109]
如图1进一步所示的,装置110可以进一步包括至少一个光学元件,该至少一个光学元件用于将至少一个光束118引导到用户的至少一只眼睛112和波前感测单元128。为此目的,该至少一个光元件可以优选地包括光学中继系统142并且此外还包括分束器122,该光学中继系统尤其用于将入射光瞳平面140中继到用户的眼睛112的瞳孔144上,该分束器如上文更详细描述的是用于将光束118(特别是部分光束126)引导到波前感测单元128上。
[0110]
如图1示意性所示的,光学中继系统142可以优选地包括具有两个广角远心透镜148、148’的望远镜146,为了简化起见,这两个广角远心透镜在图1中被示出为单一透镜,并且用于传递在入射光瞳平面140中显示的信息,以显示在用户的眼睛142的瞳孔144上。关于另一种类的光学中继系统,可以参考图2以及上述描述。
[0111]
如图1进一步所示的,分束器122可以以如下方式放置:用于将入射光瞳平面140中继到用户的眼睛112的瞳孔144上的相同光学中继系统142也用于将入射光瞳平面140中继到波前感测单元128的表面150,由此可以获得特别简单且成本更低的装置110。该装置的替代性实施例如图3示意性所示。
[0112]
图2展示了用于确定用户的眼睛112的至少一个眼睛像差的装置110的另一优选实施例。如这里示意性所示的装置110的特定实施例与图1所显示的装置110的特定实施例的不同之处在于,除了构成光学中继系统142的望远镜146之外,还包括另一望远镜152,该另一望远镜除了另一广角远心透镜154之外,还具有球面镜156、另一分束器158、以及放置在另一望远镜152的中间像平面中的轴锥镜元件160。如上所述,轴锥镜元件160具有锥形表面,从而将光束118转换成环形分布。其结果是,轴锥镜元件160侧向移动对应于周边光束的光瞳。如图5和图6示意性所示的,轴锥镜元件160在波前感测单元128的表面150上产生不同的区域,其中每个不同的区域包括一个单独的光点,这因此可以单独进行处理而在每个小
透镜下没有多个光点。
[0113]
关于涉及图2的其他细节,可以参考上文关于图1所描述的装置110的示例性实施例。
[0114]
图3展示了用于确定用户的眼睛112的至少一个眼睛像差的装置110的另一优选实施例。这里示意性所示的装置110的特定实施例与图1所显示的装置110的特定实施例的不同之处在于,这两个单独光栅138、138’中的每一个(具有用于在一个子午面内产生多重衍射级的一维光栅)各自是反射光栅136,该反射光栅被放置在单独的附加光路162、162’中,因此需要两个附加的分束器164、164’。本文中,第一单独光栅138可以优选地被放置在入射光瞳平面140中,如上文关于图1描述的。然后,一个子午面内的多重衍射级从第一单独光栅138反射。包括另外的广角远心透镜168、168’的另一望远镜166在这里将入射光瞳平面140中继到第二单独光栅138’上,该第二单独光栅相对于第一单独光栅138正交定向。在反射中,由第一单独光栅138提供的每个光束118被再次分离,从而在两个子午面内产生多重衍射级。
[0115]
如图3进一步所示的,分束器122也可以放置得靠近用户的眼睛112。然而在此布置中,装置110进一步包括另一望远镜170,该另一望远镜具有另外的广角远心透镜172、172’,其中该另一望远镜170用于将入射光瞳平面140中继到波前感测单元128的表面150。本文中,包括另外的广角远心透镜172、172’的另一望远镜170然后将入射光瞳平面140中继到用户的眼睛112的瞳孔144,其中光束118的所有入射光多重衍射级会聚在单一光点中。结果,产生遍布在用户的眼睛112的视网膜114上的点源。包括广角远心透镜148、148’的望远镜146使入射光瞳平面140与波前感测单元128的表面150共轭,其中对由每个偏心度所得的光学波前进行采样。
[0116]
关于涉及图3的其他细节,可以参考上文关于图1所描述的装置110的示例性实施例。
[0117]
图4展示了用于确定用户的眼睛112的至少一个眼睛像差的装置110的另一优选实施例。在此特定实施例中,即使在用户的眼睛112的调节期间,也可以由光学波前来确定眼睛散焦图。如图4示意性所示的,为此目的,装置110进一步包括附加分束器174、174’,其开设了附加光路176、176’。作为替代方案,装置110可以进一步包括分色镜(这里未示出),其中这些分色镜是长通镜,因此用于反射更短的波长。特别是,分色镜之一用于反射波长的最短部分,而另一分色镜用于反射波长的中间部分。结果,波长的最长部分可以传递到波前感测单元128。
[0118]
在图4的示例性实施例中,第一附加光路176包括用于调整注视目标180的焦点的可调谐透镜178,其中可调谐透镜178可以由相位调制器或巴达尔透镜代替。进一步,第二附加光路176’包括瞳孔相机182,该瞳孔相机用于同时测量用户的眼睛112的瞳孔144的运动,并在调节期间控制用户的眼睛112瞳孔144相对于注视目标180的位置。其结果是,可以以此方式根据用户的至少一只眼睛112的调节来确定用户的眼睛112的至少一个眼睛像差。
[0119]
关于涉及图4的其他细节,可以参考上文关于图1所描述的装置110的示例性实施例。
[0120]
图5展示了指示在多重衍射级184上的能量散布的图表,其中正弦衍射光栅132的相位调制深度取值为0.4 π。如上所述,衍射级184可以选自单一第零衍射级、两个第一衍射
级之一、两个第二衍射级之一或更高衍射级之一,其中衍射级184的可测量强度取决于每个衍射级184的单独衍射效率186。如图5示意性所示的图表允许在考虑第一衍射级时执行单一中央凹测量188和八个周边测量190,或者在附加地考虑第二衍射级时执行二十五个周边测量190。本文中,相位调制深度值的增加典型地导致能量平衡向更高衍射级移动。如果光栅132是正弦光栅,则可以通过使用与相应多重衍射级184相关的贝塞尔函数来描述多重衍射级184的衍射效率186。
[0121]
图6展示了指示在夏克哈特曼波前传感器130上多重衍射级184的空间分离的图表。当光束118内的多重衍射级184在入射光瞳平面140处组合时,夏克哈特曼波前传感器130的每个小透镜可以产生多个光点192,如图6示意性所示的。本文中,优选地选择小透镜的间距和焦距,以便最小化(优选地,完全避免)在夏克哈特曼波前传感器130的表面150上多个光点192之间的串扰。在图6中,将对应于相同衍射级184的光点194、194’、194
’’
与其他衍射级184分离并单独处理。进一步,如这里所示的网格196将夏克哈特曼波前传感器130的在每个小透镜下的区域分开。
[0122]
基于以上等式1,可以估计夏克哈特曼波前传感器130的参数的优选示例。使用从夏克哈特曼波前传感器130的表面150到入射光瞳平面140的放大率为2.5的光学中继,获得了两个子午面,覆盖了在入射光瞳平面140处
ꢀ±ꢀ
20
°
的场和在夏克哈特曼波前传感器130的表面150处
ꢀ±ꢀ8°
的场。考虑到
‑ꢀ
小透镜间距为1 mm;
‑ꢀ
小透镜焦距为3 mm;以及
‑ꢀ
用于艾里斑计算的850 nm的光波长),夏克哈特曼波前传感器130能够测量9.53
°
的最大角度。偏心光束对应于8
°
的倾斜。因此,夏克哈特曼波前传感器130的动态范围可以对应于1.53
°
的最大波前倾斜。通过选择这些参数,在小透镜下的传感器区域之间不可能发生串扰。
[0123]
此外,夏克哈特曼波前传感器130的动态范围可以通过使用先进的处理方法来改进,如例如以下文献描述的:lundstr
ö
m, l., & unsbo, p. (2004), unwrapping hartmann-shack images from highly aberrated eyes using an iterative b-spline based extrapolation method [使用迭代式基于b样条的外推方法展开来自高度畸变的眼睛的夏克哈特曼图像],optometry and vision science[视光学和视觉科学], 81(5), 383-388。
[0124]
图7示意性地展示了根据本发明的用于确定用户的至少一只眼睛112的至少一个眼睛像差的方法210的优选实施例。
[0125]
在照明步骤212中,可以提供沿着光路120的光束118,优选地通过使用光源116,特别是激光二极管。
[0126]
在根据步骤b)的衍射步骤214中,在光束118中在两个子午面内以如下方式产生多重衍射级168:多重衍射级168在用户的眼睛112中(尤其是在视网膜114上)和在波前感测单元128上是空间分离的。
[0127]
在引导步骤216中,包括多重衍射级168的光束118可以被引导到用户的至少一只眼睛112和波前感测单元128。为此目的,光束118可以被分成两个部分光束124、126,其中第一部分光束124可以被引导到用户的眼睛112,尤其是被引导到视网膜114,并且从用户的眼
睛112被接收,尤其用于经由第二部分光束126被引导朝向波前感测单元128,尤其被引导到夏克哈特曼波前传感器130的表面150。
[0128]
在根据步骤a)的测量步骤218中,优选地实时地测量由光束118、尤其是由第二部分光束126构成的光学波前,由此从该光学波前来确定表示在用户的眼睛112中的视网膜场的眼睛像差的眼睛散焦图220,优选地通过对用户的眼睛112的一次性测量。在此,眼睛散焦图220可以优选地包括与在波前感测单元128上在两个子午面内产生的多个光点176相关的值,或者更优选地,内插在多个光点176之间的值。此外,可以使用至少一种优选地选自机器学习或人工智能的算法来进一步改进这些测量。
[0129]
附图标记清单110用于确定用户的至少一只眼睛的至少一个眼睛像差的装置112眼睛114视网膜116光源118光束120光路122分束器124第一部分光束126第二部分光束128波前感测单元130夏克哈特曼波前传感器132光栅134透射光栅136反射光栅138,138’单独的光栅140入射光瞳平面142光学中继系统144瞳孔146望远镜148,148’广角远心透镜150表面152另一望远镜154另一广角远心透镜156球面镜158另一分束器160轴锥镜元件162,162’附加光路164,164’附加分束器166另一望远镜168,168’另外的广角远心透镜
170另一望远镜170,172’另外的广角远心透镜174,174’附加分束器176,176’附加光路178可调谐透镜180焦点可调的注视目标182瞳孔相机184衍射级186衍射效率188中央凹测量190周边测量192光点194,194
’…
光点196网格210方法212照明步骤214衍射步骤216引导步骤218测量步骤220眼睛散焦图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1