一种纸面石膏板自动化高精度切断装置及方法与流程
1.本发明涉及石膏板切断技术领域,具体涉及一种纸面石膏板自动化高精度切断装置及方法。
背景技术:
2.开展纸面石膏板智能生产过程无人化自动化技术研究,符合工业4.0战略和中国制造2025行动纲领的具体要求。通过对生产现场的生产工艺和控制方式的全面采集和深度分析,发现导致生产瓶颈和产品缺陷的深层次原因,不断提高生产效率和石膏板的产品品质。基于现场数据采集开展综合分析,提高石膏板的生产控制水平,减少现场操作人员,降低人员对生产的干预,降低企业运营成本,能有效节约资源和能源,具有深远现实意义。
3.切断机是石膏板生产线关键设备,其作用是将连续成型的石膏板湿板切断分组,切断精度与后续生产有着密切关系,因此,提高切断机切断精度及稳定性,是石膏板生产线连续生产的保障,也是提高生产投入产出率的较关键因素。现有技术中,石膏板切断机传动用直齿轮,而且润滑条件较差,润滑时需停机打开防护罩,涂抹润滑脂;所以传动齿轮很容易磨损,传动系统传动过程中容易产生间隙,传动精度不高,造成石膏板切断精度不高;再加上,上、下切刀间距及相对转角的调整非常不方便,调整时必须停机,打开防护罩,松开定位螺栓,调整后再紧固,相当麻烦,不利于稳定生产,不适合于大型纸面石膏板生产线的生产需求。
技术实现要素:
4.本发明的目的在于提供一种纸面石膏板自动化高精度切断装置及方法,以解决现有技术中切断精度低,稳定控制性低的技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.一种纸面石膏板自动化高精度切断装置,包括:运动控制器、双轴电机模块、伺服电机模块和切刀结构,所述运动控制器与所述双轴电机模块电性连接,所述双轴电机模块与所述伺服电机模块电性连接,所述伺服电机模块和切刀结构控制连接,其中,
7.所述运动控制器用于依据纸面石膏板的切割长度、切刀结构的结构参数设定控制切刀结构沿运行轨迹旋转运动的运行轨迹程序,所述双轴电机模块用于执行所述运行轨迹程序输出控制伺服电机模块旋转运动的驱动信号,所述伺服电机模块用于根据所述驱动信号进行旋转运动以为切刀结构提供依所述运行轨迹进行旋转运动的驱动力,所述切刀结构用于依据所述驱动力沿运行轨迹进行旋转运动以对传送中纸面石膏板按切割长度进行高精度连续切断。
8.作为本发明的一种优选方案,所述伺服电机模块包括上切刀伺服电机和下切刀伺服电机,所述上切刀伺服电机和下切刀伺服电机均与双轴电机模块电性连接,所述切刀结构包括上切刀和下切刀,所述上切刀伺服电机与所述上切刀控制连接,所述下切刀伺服电机与所述下切刀控制连接,所述上切刀位于传送中纸面石膏板的上方,所述下切刀位于传
送中纸面石膏板的下方,所述上切刀伺服电机和所述下切刀伺服电机均用于根据同一驱动信号进行旋转运动以分别为上切刀和下切刀提供依所述运行轨迹进行旋转运动的同一驱动力,所述上切刀和下切刀在同一驱动力作用下沿运行轨迹分别在传送中纸面石膏板上方和下方进行同步旋转运动,以由纸面石膏板的上方和下方对传送中纸面石膏板按切割长度进行双向定点的连续切断实现切断精度的提高。
9.作为本发明的一种优选方案,所述运动控制器包括交互单元、运行轨迹规划单元和轨迹程序生成单元,所述交互单元用于输入纸面石膏板的切割长度,所述运行轨迹规划单元用于根据交互单元输入的切割长度结合上切刀/下切刀旋转运动形成的剪切圆周尺寸设定出包含上切刀/下切刀的旋转起点、剪切点、同步起始点和同步终止点以及各点间的旋转转速的运行轨迹,所述轨迹程序生成单元用于根据所述运行轨迹编码生成包含驱动信号输出数值的所述运行轨迹程序,所述上切刀和下切刀在同步起始点到同步终止点之间的旋转转速与传送中纸面石膏板的传送转速一致,所述上切刀和下切刀在同步起始点到同步终止点之间的旋转方向与传送中纸面石膏板的传送方向相同,所述上切刀和下切刀在同步终止点到同步起始点之间的旋转方向与传送中纸面石膏板的传送方向相反。
10.作为本发明的一种优选方案,所述上切刀的剪切点与所述下切刀的剪切点位于与传送中纸面石膏板的同一垂直纵轴上,且分别位于传送中纸面石膏板上端面与下端面上以实现从纸面石膏板上端面和纸面石膏板下端面在同一纵向上对纸面石膏板进行双向切断。
11.作为本发明的一种优选方案,所述上切刀旋转运动形成的剪切圆周尺寸与下切刀旋转运动形成的剪切圆周尺寸相同,所述运行轨迹的轨迹轮廓尺寸与上切刀/下切刀旋转运动形成的剪切圆周尺寸一致。
12.作为本发明的一种优选方案,本发明提供了一种根据所述的纸面石膏板自动化高精度切断装置的高精度切断方法,包括以下步骤:
13.步骤s1、依据纸面石膏板的切割长度、切刀结构的结构参数设定控制切刀结构沿运行轨迹旋转运动的运行轨迹程序,并控制双轴电机模块执行所述运行轨迹程序输出控制伺服电机模块旋转运动的驱动信号;
14.步骤s2、所述伺服电机模块根据所述驱动信号进行旋转运动以为切刀结构提供依所述运行轨迹进行旋转运动的驱动力;
15.步骤s3、所述切刀结构依据所述驱动力沿运行轨迹进行旋转运动以对传送中纸面石膏板按切割长度进行高精度连续切断。
16.作为本发明的一种优选方案,步骤s1中,所述运行轨迹包括旋转起始点、剪切点、同步起始点和同步终止点以及各点间的旋转转速,按预设长度将所述同步起始点到同步终止点在轨迹轮廓上分别对称设定于剪切点的两侧,所述旋转起始点与剪切点对称设定在位于轨迹轮廓上同一圆心轴的两侧,将所述上切刀和下切刀在同步起始点到同步终止点之间的旋转转速设置为传送中纸面石膏板的传送转速。
17.作为本发明的一种优选方案,利用优化算法基于所述切割长度和运行轨迹的轨迹轮廓尺寸设置同步终止点到同步起始点间上切刀和下切刀的旋转转速,包括:
18.将切割长度除以传送中纸面石膏板的传送转速得到纸面石膏板的切割时间间隔,所述纸面石膏板的切割时间间隔与上切刀/下切刀沿运行轨迹旋转运动一周的时间相同,将同步起始点到同步终止点的预设长度除以所述传送转速得到运行轨迹中上切刀/下切刀
在同步起始点到同步终止点间旋转运动的时间;
19.将所述纸面石膏板的切割时间间隔减去上切刀/下切刀在同步起始点到同步终止点间旋转运动的时间得到上切刀/下切刀在同步终止点到同步起始点间旋转运动的时间,将上切刀/下切刀在同步终止点到同步起始点间旋转运动的时间进行按预设时长进行等份分割得到一组运动时序{ti|i∈[1,n]},n为运动时序总数量;
[0020]
为上切刀/下切刀在每个运动时序处设定旋转转速{vi|i∈[1,n]},利用方差公式量化相邻运动时序间的波动程度总和作为旋转转速的优化函数,所述旋转转速的优化函数为:
[0021][0022]
式中,δ为相邻运动时序间的波动程度总和,v
i+1
、vi分别为第i个运动时序处的旋转转速,ti为第i个运动时序,min为最小化运算符;
[0023]
将每个运动时序处的旋转转速与运行时序进行积分求解得到同步终止点到同步起始点间的旋转长度,以及伺服电机模块的转速极限作为所述优化函数的约束条件,所述约束条件的函数表达式为:
[0024][0025]
式中,l为同步终止点到同步起始点间的旋转长度,l为同步起始点到同步终止点的预设长度,v
max
为伺服电机模块达到的最大旋转转速;
[0026]
基于约束条件对旋转转速的优化函数进行求解得到旋转转速{vi|i∈[1,n]}的确定值。
[0027]
作为本发明的一种优选方案,步骤s1和步骤s2中,双轴电机模块将驱动信号同步传送至上切刀伺服电机和下切刀伺服电机,且上切刀伺服电机和下切刀伺服电机同步生成分别驱动上切刀和下切刀的所述驱动力。
[0028]
作为本发明的一种优选方案,步骤s3中,所述上切刀和下切刀同步接收驱动力并同步沿运行轨迹进行旋转运动,以同步运行至所述剪切点处对传送中纸面石膏板进行双向切断。
[0029]
本发明与现有技术相比较具有如下有益效果:
[0030]
本发明利用上下切刀进行双向切割,而且上切刀与下切刀之间进行电子齿轮同步,该电子齿轮为独立的轴,免去了中间环节,不需要考虑机械损耗,可以通过软件实现无级调速,传动柔性好,控制精度高,不会产生机械背隙。然后切刀与生产线主线进行电子凸轮同步,控制方式响应时间短,机械加工难度低,并且利用最小化的速度波动来设定运行轨迹上的旋转转速,从而提高了上切刀伺服电机和下切刀伺服电机的运行稳定性。
附图说明
[0031]
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方
式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
[0032]
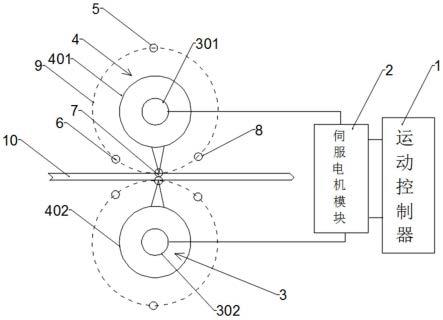
图1为本发明实施例提供的纸面石膏板自动化高精度切断装置结构示意图;
[0033]
图2为本发明实施例提供的高精度切断方法流程图。
[0034]
图中的标号分别表示如下:
[0035]
1-运动控制器;2-双轴电机模块;3-伺服电机模块;4-切刀结构;5-旋转起点;6-剪切点;7-同步起始点;8-同步终止点;9-运行轨迹;10-纸面石膏板;301-上切刀伺服电机;302-下切刀伺服电机;401-上切刀;402-下切刀。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
如图1所示,本发明提供了一种纸面石膏板自动化高精度切断装置,包括:运动控制器1、双轴电机模块2、伺服电机模块3和切刀结构4,所述运动控制器1与所述双轴电机模块2电性连接,所述双轴电机模块2与所述伺服电机模块3电性连接,所述伺服电机模块3和切刀结构4控制连接,其中,
[0038]
所述运动控制器1用于依据纸面石膏板的切割长度、切刀结构4的结构参数设定控制切刀结构4沿运行轨迹旋转运动的运行轨迹程序,所述双轴电机模块2用于执行所述运行轨迹程序输出控制伺服电机模块3旋转运动的驱动信号,所述伺服电机模块3用于根据所述驱动信号进行旋转运动以为切刀结构4提供依所述运行轨迹进行旋转运动的驱动力,所述切刀结构4用于依据所述驱动力沿运行轨迹进行旋转运动以对传送中纸面石膏板按切割长度进行高精度连续切断。
[0039]
所述伺服电机模块3包括上切刀伺服电机301和下切刀伺服电机302,所述上切刀伺服电机301和下切刀伺服电机302均与双轴电机模块2电性连接,所述切刀结构4包括上切刀401和下切刀402,所述上切刀伺服电机301与所述上切刀401控制连接,所述下切刀伺服电机302与所述下切刀402控制连接,所述上切刀401位于传送中纸面石膏板的上方,所述下切刀402位于传送中纸面石膏板的下方,所述上切刀伺服电机301和所述下切刀伺服电机302均用于根据同一驱动信号进行旋转运动以分别为上切刀401和下切刀402提供依所述运行轨迹进行旋转运动的同一驱动力,所述上切刀401和下切刀402在同一驱动力作用下沿运行轨迹分别在传送中纸面石膏板上方和下方进行同步旋转运动,以由纸面石膏板的上方和下方对传送中纸面石膏板按切割长度进行双向定点的连续切断实现切断精度的提高。
[0040]
所述运动控制器1包括交互单元、运行轨迹规划单元和轨迹程序生成单元,所述交互单元用于输入纸面石膏板的切割长度,所述运行轨迹规划单元用于根据交互单元输入的切割长度结合上切刀401/下切刀402旋转运动形成的剪切圆周尺寸设定出包含上切刀401/下切刀402的旋转起点、剪切点、同步起始点和同步终止点以及各点间的旋转转速的运行轨迹,所述轨迹程序生成单元用于根据所述运行轨迹编码生成包含驱动信号输出数值的所述
运行轨迹程序,所述上切刀401和下切刀402在同步起始点到同步终止点之间的旋转转速与传送中纸面石膏板的传送转速一致,所述上切刀401和下切刀402在同步起始点到同步终止点之间的旋转方向与传送中纸面石膏板的传送方向相同,所述上切刀401和下切刀402在同步终止点到同步起始点之间的旋转方向与传送中纸面石膏板的传送方向相反。
[0041]
所述上切刀401的剪切点与所述下切刀402的剪切点位于与传送中纸面石膏板的同一垂直纵轴上,且分别位于传送中纸面石膏板上端面与下端面上以实现从纸面石膏板上端面和纸面石膏板下端面在同一纵向上对纸面石膏板进行双向切断。
[0042]
所述上切刀401旋转运动形成的剪切圆周尺寸与下切刀402旋转运动形成的剪切圆周尺寸相同,所述运行轨迹的轨迹轮廓尺寸与上切刀401/下切刀402旋转运动形成的剪切圆周尺寸一致。
[0043]
伺服上切刀电机输出轴直接连接上切刀,伺服下切刀电机输出轴直接连接下切刀,上切刀与下切刀之间没有机械连接关系,这样上切刀与下切刀之间进行电子齿轮同步,即上切刀和下切刀能够同步旋转运动在纸面石膏板上剪切,该电子齿轮为独立的轴,免去了中间环节,不需要考虑机械损耗,可以通过软件实现无级调速,传动柔性好,齿轮比可以任意修改,控制精度高,不会产生机械背隙。然后切刀设置有同步起始点和同步终止点,并将同步起始点到同步终止点的切刀旋转转速与生产线主线(纸面石膏板的传送速度)进行电子凸轮同步。该控制方式响应时间短,机械加工难度低,理论上误差在
±
0.5mm,但考虑到机械方面或其他原因,该方法控制精度在
±
1mm。
[0044]
如图2所示,基于纸面石膏板自动化高精度切断装置,本发明提供了一种根据高精度切断方法,包括以下步骤:
[0045]
步骤s1、依据纸面石膏板的切割长度、切刀结构的结构参数设定控制切刀结构沿运行轨迹旋转运动的运行轨迹程序,并控制双轴电机模块执行所述运行轨迹程序输出控制伺服电机模块旋转运动的驱动信号;
[0046]
步骤s1中,所述运行轨迹包括旋转起始点、剪切点、同步起始点和同步终止点以及各点间的旋转转速,按预设长度将所述同步起始点到同步终止点在轨迹轮廓上分别对称设定于剪切点的两侧,所述旋转起始点与剪切点对称设定在位于轨迹轮廓上同一圆心轴的两侧,将所述上切刀和下切刀在同步起始点到同步终止点之间的旋转转速设置为传送中纸面石膏板的传送转速。
[0047]
利用优化算法基于所述切割长度和运行轨迹的轨迹轮廓尺寸设置同步终止点到同步起始点间上切刀和下切刀的旋转转速,包括:
[0048]
将切割长度除以传送中纸面石膏板的传送转速得到纸面石膏板的切割时间间隔,所述纸面石膏板的切割时间间隔与上切刀/下切刀沿运行轨迹旋转运动一周的时间相同,将同步起始点到同步终止点的预设长度除以所述传送转速得到运行轨迹中上切刀/下切刀在同步起始点到同步终止点间旋转运动的时间;
[0049]
将所述纸面石膏板的切割时间间隔减去上切刀/下切刀在同步起始点到同步终止点间旋转运动的时间得到上切刀/下切刀在同步终止点到同步起始点间旋转运动的时间,将上切刀/下切刀在同步终止点到同步起始点间旋转运动的时间进行按预设时长进行等份分割得到一组运动时序{ti|i∈[1,n]},n为运动时序总数量;
[0050]
为上切刀/下切刀在每个运动时序处设定旋转转速{vi|i∈[1,n]},利用方差公式
量化相邻运动时序间的波动程度总和作为旋转转速的优化函数,所述旋转转速的优化函数为:
[0051][0052]
式中,δ为相邻运动时序间的波动程度总和,v
i+1
、vi分别为第i个运动时序处的旋转转速,ti为第i个运动时序,min为最小化运算符;
[0053]
将每个运动时序处的旋转转速与运行时序进行积分求解得到同步终止点到同步起始点间的旋转长度,以及伺服电机模块的转速极限作为所述优化函数的约束条件,所述约束条件的函数表达式为:
[0054][0055]
式中,l为同步终止点到同步起始点间的旋转长度,l为同步起始点到同步终止点的预设长度,v
max
为伺服电机模块达到的最大旋转转速;
[0056]
基于约束条件对旋转转速的优化函数进行求解得到旋转转速{vi|i∈[1,n]}的确定值。
[0057]
相邻运动时序间的波动程度总和最小化为优化目标,能够保证在上切刀/下切刀旋转运行过程中不会出现频繁的速度突然增加或减小的现象,相邻时序间保持稳定的速度更替,从而能够保证切刀平稳的旋转运行,提高剪切过程的平稳性,提高剪切的精度。
[0058]
步骤s2、所述伺服电机模块根据所述驱动信号进行旋转运动以为切刀结构提供依所述运行轨迹进行旋转运动的驱动力;
[0059]
步骤s1和步骤s2中,双轴电机模块将驱动信号同步传送至上切刀伺服电机和下切刀伺服电机,且上切刀伺服电机和下切刀伺服电机同步生成分别驱动上切刀和下切刀的所述驱动力。
[0060]
步骤s3、所述切刀结构依据所述驱动力沿运行轨迹进行旋转运动以对传送中纸面石膏板按切割长度进行高精度连续切断。
[0061]
步骤s3中,所述上切刀和下切刀同步接收驱动力并同步沿运行轨迹进行旋转运动,以同步运行至所述剪切点处对传送中纸面石膏板进行双向切断。
[0062]
本发明利用上下切刀进行双向切割,而且上切刀与下切刀之间进行电子齿轮同步,该电子齿轮为独立的轴,免去了中间环节,不需要考虑机械损耗,可以通过软件实现无级调速,传动柔性好,控制精度高,不会产生机械背隙。然后切刀与生产线主线进行电子凸轮同步,控制方式响应时间短,机械加工难度低,并且利用最小化的速度波动来设定运行轨迹上的旋转转速,从而提高了上切刀伺服电机和下切刀伺服电机的运行稳定性。
[0063]
以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1