仿人教育机器人的制作方法
1.本发明涉及机器人技术领域,特别涉及一种仿人教育机器人。
背景技术:
2.随着编程教育的发展,社会上越来越重视学生编程技术的学习。于是,出现了可编程机器人,让孩子通过机器人编程培养动手能力和逻辑思维计算。因此,相关的可编程机器人是否符合教学需求显得尤为重要。现有技术中,可编程机器人大多数的运动自由度较少,运动模式比较单一,具有很多局限性。相关技术中,机器人难以实现多种动作,不能满足编程需求。
技术实现要素:
3.本发明的主要目的是提供一种仿人教育机器人,旨在使机器人实现多种动作,从而满足编程需求。
4.为实现上述目的,本发明提出的一种仿人教育机器人,包括:
5.头部;
6.躯干,所述头部设于所述躯干的上端,所述躯干内设有主控板,定义所述仿人教育机器人于空间中具有水平面和垂直于所述水平面的第一竖直面和第二竖直面,所述第一竖直面和第二竖直面相互垂直,所述头部相对于所述躯干沿所述水平面转动;
7.上肢,所述上肢设有两个,两所述上肢分别设于所述躯干上端相对的两侧,所述上肢包括肩关节和手臂部,所述肩关节转动连接于所述躯干,并沿所述第一竖直面转动,所述手臂部转动连接于所述肩关节,并沿所述第二竖直面转动;以及
8.下肢,所述下肢设有两个,所述下肢设于所述躯干下端相对的两侧,所述下肢包括髋关节和腿部,所述髋关节转动连接于所述躯干,并沿所述第二竖直面转动,所述腿部转动连接于所述髋关节,并沿所述第一竖直面转动。
9.可选地,所述上肢包括上臂和下臂,所述上臂转动连接于所述肩关节,所述下臂转动连接于所述上臂,并沿所述第二竖直面转动。
10.可选地,所述腿部包括上腿和下腿,所述上腿转动连接于所述髋关节,所述下腿转动连接于所述上腿,并沿所述第一竖直面转动。
11.可选地,所述下腿包括小腿和脚体,所述小腿转动连接于所述上腿,所述脚体转动连接于所述小腿,并沿所述第一竖直面转动。
12.可选地,所述脚体包括踝关节和脚掌,所述踝关节转动连接于所述小腿,所述脚掌转动连接于所述踝关节,并沿所述第二竖直面转动。
13.可选地,所述上臂的上端设有电机,以驱动所述上臂相对于所述肩关节转动;
14.和/或,所述上臂的下端设有电机,以驱动所述下臂相对于所述上臂转动。
15.可选地,所述上腿的上端设有电机,以驱动所述腿部相对于所述髋关节转动;
16.和/或,所述上腿的下端设有电机,以驱动所述下腿相对于所述上腿转动。
17.可选地,所述小腿的下端设有电机,以驱动所述脚体相对于所述小腿转动;
18.和/或,所述踝关节设有电机,以驱动所述脚掌相对于所述踝关节转动。
19.可选地,所述躯干的上端设有电机,以驱动头部相对于所述躯干转动;
20.和/或,所述躯干的上端相对的两侧各设有一电机,以驱动两所述上肢相对于所述躯干转动;
21.和/或,所述躯干的下端相对的两侧各设有一电机,以驱动两所述下肢相对于所述躯干转动。
22.可选地,所述仿人教育机器人设有传感器模块,所述传感器模块可拆卸连接于所述仿人教育机器人,所述传感器模块包括多个子传感器,所述子传感器可拆卸连接于所述传感器模块;
23.和/或,所述仿人教育机器人设有摄像头。
24.本发明技术方案仿人教育机器人中,通过在躯干的上端设置头部,躯干内设有主控板,以控制仿人教育机器人的动作,定义仿人教育机器人于空间中具有水平面和垂直于水平面的第一竖直面和第二竖直面,第一竖直面和第二竖直面相互垂直,头部相对于躯干沿水平面转动,以实现头部的动作,上肢设有两个,分别设于躯干上端相对的两侧,上肢包括肩关节和手臂部,肩关节转动连接于躯干,并沿第一竖直面转动,手臂部转动连接于肩关节,并沿第二竖直面转动,以实现上肢的动作,从而使两个上肢组合能完成多种不同的上肢动作,下肢设有两个,下肢设于躯干下端相对的两侧,下肢包括髋关节和腿部,髋关节转动连接于躯干,并沿第二竖直面转动,腿部转动连接于髋关节,并沿第一竖直面转动,以实现下肢的动作,从而使两个下肢组合能完成多种不同的下肢动作。通过仿人教育机器人各部件的转动配合,以实现多种复杂动作,从而满足编程需求。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
26.图1为本发明仿人教育机器人一实施例的整体示意图;
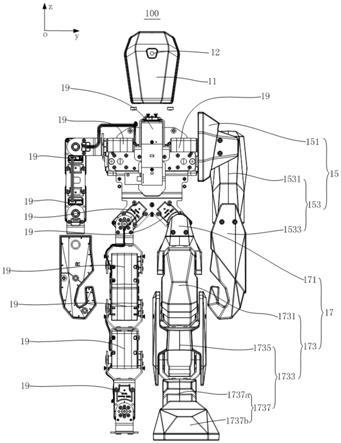
27.图2为本发明仿人教育机器人一实施例的主视图;
28.图3为本发明仿人教育机器人一实施例的局部结构主视图;
29.图4为本发明仿人教育机器人一实施例的动作示意图;
30.图5为本发明仿人教育机器人一实施例的踢腿动作示意图。
31.附图标号说明:
32.标号名称标号名称100仿人教育机器人17下肢11头部171髋关节12摄像头173腿部13躯干1731上腿14传感器模块1733下腿
141子传感器1735小腿15上肢1737脚体151肩关节1737a踝关节153手臂部1737b脚掌1531上臂19电机1533下臂
ꢀꢀ
33.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
37.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
38.本发明提出一种仿人教育机器人,应用于机器人技术领域。
39.随着计算机编程技术的快速发展,人们越来越重视培养学生的编程技术。其中,由于机器人可以通过执行程序,来实现各种动作,不仅能直观地看到程序的执行效果,还具有极高的可玩性,容易培养学生对于编程的兴趣。理论上,机器人能实现的动作越多,可执行的程序就越多,可玩性也就越高。因此,一款能实现的多种动作的机器人是编程教育中迫切需要的。
40.结合参照图1至图5,在本发明实施例中,仿人教育机器人100包括头部11、躯干13、上肢15以及下肢17,头部11设于躯干13的上端,躯干13内设有主控板,定义仿人教育机器人100于空间中具有水平面和垂直于水平面的第一竖直面和第二竖直面,第一竖直面和第二竖直面相互垂直(参照图1,定义x轴和y轴形成的面xoy为水平面,x轴和z轴形成的面xoz为第一竖直面,y轴和z轴形成的面yoz为第二竖直面,可以理解的是,上述表征仅为相对位置关系的表征)。头部11相对于躯干13沿水平面转动,上肢15设有两个,两上肢15分别设于躯
干13上端相对的两侧,上肢15包括肩关节151和手臂部153,肩关节151转动连接于躯干13,并沿第一竖直面转动,手臂部153转动连接于肩关节151,并沿第二竖直面转动,下肢17设有两个,下肢17设于躯干13下端相对的两侧,下肢17包括髋关节171和腿部173,髋关节171转动连接于躯干13,并沿第二竖直面转动,腿部173转动连接于髋关节171,并沿第一竖直面转动。
41.仿人教育机器人100包括头部11、躯干13、上肢15以及下肢17,通过如此设置,使仿人教育机器人100具有人体的头部11、躯干13以及四肢的结构,从而方便仿人教育机器人100模拟人体的身体动作。头部11设于躯干13的上端,并可相对于躯干13沿水平面转动,以方便仿人教育机器人100模拟人体的摇头动作。
42.上肢15设有两个,两上肢15分别设于躯干13上端相对的两侧,使仿人教育机器人100模拟人的上肢分布位置,从而方便仿人教育机器人100模拟人的上肢动作。上肢15包括肩关节151和手臂部153,肩关节151转动连接于躯干13,并沿第一竖直面转动,以方便仿人教育机器人100模拟人体的前后抬上肢动作。手臂部153转动连接于肩关节151,并沿第二竖直面转动,以方便仿人教育机器人100模拟人体的左右抬上肢动作。通过仿人教育机器人上肢15各部件的转动配合,以实现上肢15的动作,从而使两个上肢15组合能完成多种不同的上肢15动作。
43.下肢17设有两个,下肢17设于躯干13下端相对的两侧,使仿人教育机器人100模拟人的下肢17分布位置,从而方便仿人教育机器人100模拟人的下肢动作。下肢17包括髋关节171和腿部173,髋关节171转动连接于躯干13,并沿第二竖直面转动,以方便仿人教育机器人100模拟人体的左右抬腿动作。腿部173转动连接于髋关节171,并沿第一竖直面转动,以方便仿人教育机器人100模拟人体的前后抬腿动作。通过仿人教育机器人下肢17各部件的转动配合,以实现下肢17的动作,从而使两个下肢组合能完成多种不同的下肢17动作。
44.躯干13内设有主控板,不仅可以控制仿人教育机器人100的动作,还可以接收编辑的程序。主控板接收外部编辑的程序,以对输入的程序做相应的处理,从而生成不同的指令,进而可控制仿人教育机器人100各部件转动的角度,使仿人教育机器人100各部件相互配合,从而使仿人教育机器人100实现多种动作。
45.此外,需要说明的是,主控板接收程序可以是通过在主控板上设置usb接口、type
‑
c接口或者其他有效的传输接口,从而方便usb数据线、type
‑
c数据线或者其他有效传输线的连接,也可以是通过在主控板上设置蓝牙接收器、wi
‑
fi接收器或者其他有效的接收器,从而方便数据的无线传输。
46.可以理解地,通过仿人教育机器人100各部件转动配合,以模拟人的四肢和头部11运动,从而实现多种复杂动作,例如:跑步、翻跟斗、体操等,进而满足多种多样的编程需求。
47.结合参照图1至图5,在本技术的一实施例中,手臂部153包括上臂1531和下臂1533,上臂1531转动连接于肩关节151,下臂1533转动连接于上臂1531,并沿第二竖直面转动。通过如此设置,不仅方便仿人教育机器人100模拟人体的小臂弯曲动作,还进一步增加了仿人教育机器人100上肢15的灵活度,进而可配合仿人教育机器人100模拟的前后和左右的抬上肢15动作,以实现模拟多种复杂的上肢15动作,例如上肢伸展、上肢弯举、拳击等动作。
48.结合参照图1至图5,在本技术的一实施例中,腿部173包括上腿1731和下腿1733,
上腿1731转动连接于髋关节171,下腿1733转动连接于上腿1731,并沿第一竖直面转动。通过如此设置,不仅方便仿人教育机器人100模拟人体的小腿弯曲动作,还进一步增加了仿人教育机器人100腿部173的灵活度,进而可配合仿人教育机器人100模拟的前后和左右的抬腿动作,以实现模拟多种复杂的腿部动作,例如下蹲、踢腿、跑步、跳跃等动作。
49.结合参照图1至图5,在本技术的一实施例中,下腿1733包括小腿1735和脚体1737,小腿1735转动连接于上腿,脚体1737转动连接于小腿1735,并沿第一竖直面转动。通过如此设置,方便仿人教育机器人100模拟人体的脚掌前后弯曲动作,进一步增加了仿人教育机器人100下腿1733的灵活度,进而可配合仿人教育机器人100模拟的人体腿部动作,以更逼真地模拟多种复杂的腿脚动作,例如下蹲、踢腿、跑步、跳跃等动作。
50.上腿1731和下腿1733连接处可以设置覆盖件。该覆盖件由第一连接部和第二连接部组成,第一连接部连接于第二连接部,以方便覆盖件的拆卸和安装。第一连接部和第二连接部的连接位置设置在下腿1733,该覆盖件固定连接于小腿1735。通过如此设置,既可以避免干涉上腿1731和下腿1733之间的转动,也可以避免干涉小腿1735和脚体1737之间的转动。第一连接部和第二连接部不仅分别覆盖了上腿1731和下腿1733的转动连接处,还分别覆盖了小腿1735和脚体1737的转动连接处,从而使覆盖件覆盖了两个不同位置的转动连接处,进而保护了两个不同位置的转动连接处的连接器和线路,以避免连接器和线路暴露在仿人教育机器人100的外部,从而实现对连接器和线路的保护,进而延长连接器和线路的使用寿命。
51.此外,需要说明的是,覆盖件与小腿1735的固定连接方式可以是通过螺钉连接,也可以是通过卡扣连接,还可以是其他有效的连接方式。同样的,第一连接部和第二连接部的连接方式可以是通过螺钉连接,也可以是通过卡扣连接,还可以是其他有效的连接方式。
52.结合参照图1至图5,在本技术的一实施例中,脚体1737包括踝关节1737a和脚掌1737b,踝关节1737a转动连接于小腿1735,脚掌1737b转动连接于踝关节1737a,并沿第二竖直面转动。通过如此设置,方便仿人教育机器人100模拟人体的脚掌左右弯曲动作,进一步增加了仿人教育机器人100脚体1737的灵活度,进而可配合仿人教育机器人100模拟的人体腿部动作,以更逼真地模拟多种复杂的腿脚动作,例如下蹲、踢腿、跑步、跳跃等动作。同时,对脚体1737结构的细化,可以使仿人教育机器人100能够进行动作的微调,以提高动作的精准度,从而能精准地平衡仿人教育机器人100的重心,使仿人教育机器人100运动起来更加平稳和顺畅。
53.脚掌1737b可以设置让位槽。该让位槽的两侧槽壁分别设有连接件,该连接件用于连接踝关节1737a,从而实现踝关节1737a和脚掌1737b之间的转动连接。让位槽预留有转动空间,不仅可以保证踝关节1737a和脚掌1737b之间的转动无障碍,还可以根据转动角度的需要,限制踝关节1737a和脚掌1737b之间的转动范围,从而使踝关节1737a和脚掌1737b在预设角度范围内转动,进而使脚体1737更加精确、可靠地模拟动作。
54.结合参照图3,在本技术的一实施例中,上臂1531的上端设有电机19,以驱动上肢15相对于肩关节151转动。通过在上臂1531的上端设置电机19,可以驱动上肢15相对于肩关节151转动,从而实现上肢15沿第二竖直面转动,进而实现模拟人体的左右抬上肢15动作。
55.此外,需要说明的是,上臂1531的上端的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
56.结合参照图3,在本技术的一实施例中,上臂1531的下端设有电机19,以驱动下臂1533相对于上臂1531转动。通过在上臂1531的下端设置电机19,可以驱动下臂1533相对于上臂1531转动,从而实现下臂1533沿第一竖直面转动,进而实现模拟人体的小臂弯曲动作。
57.此外,需要说明的是,上臂1531的下端的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
58.结合参照图3,在本技术的一实施例中,上腿1731的上端设有电机19,以驱动腿部173相对于髋关节171转动。通过在上腿1731的上端设置电机19,可以驱动腿部173相对于髋关节171转动,从而实现腿部173沿第一竖直面转动,进而实现模拟人体的前后抬腿动作。
59.此外,需要说明的是,上腿1731的上端的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
60.结合参照图3,在本技术的一实施例中,上腿1731的下端设有电机19,以驱动下腿1733相对于上腿1731转动。通过在上腿1731的下端设置电机19,可以驱动下腿1733相对于上腿1731转动,从而实现下腿1733沿第一竖直面转动,进而实现模拟人体的小腿1735弯曲动作。
61.此外,需要说明的是,上腿1731的下端的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
62.结合参照图3,在本技术的一实施例中,小腿1735的下端设有电机19,以驱动脚体1737相对于小腿1735转动。通过在小腿1735的下端设置电机19,可以驱动脚体1737相对于小腿1735转动,从而实现脚体1737沿第一竖直面转动,进而实现模拟人体的脚掌前后弯曲动作。
63.此外,需要说明的是,小腿1735的下端的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
64.结合参照图3,在本技术的一实施例中,踝关节1737a设有电机19,以驱动脚掌1737b相对于踝关节1737a转动。通过在踝关节1737a设置电机19,可以驱动脚掌1737b相对于踝关节1737a转动,从而实现脚掌1737b沿第二竖直面转动,进而实现模拟人体的脚掌前左右弯曲动作。
65.此外,需要说明的是,踝关节1737a的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
66.结合参照图3,在本技术的一实施例中,躯干13的上端设有电机19,以驱动头部11相对于躯干13转动。通过在躯干13的上端设置电机19,可以驱动头部11相对于躯干13转动,从而实现头部11沿水平面转动,进而实现模拟人体的摇头动作。
67.此外,需要说明的是,躯干13的上端连接头部11的电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
68.结合参照图3,在本技术的一实施例中,躯干13的上端相对的两侧各设有一电机19,以驱动两上肢15相对于躯干13转动。通过在躯干13上端相对的两侧各设有一电机19,从而实现两上肢15的肩关节151分别沿第一竖直面转动,可以使两上肢15分别相对于躯干13转动,进而实现模拟人体双手的前后抬上肢15动作。
69.此外,需要说明的是,躯干13的上端相对的两侧的两电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
70.结合参照图3,在本技术的一实施例中,躯干13的下端相对的两侧各设有一电机19,以驱动两下肢17相对于躯干13转动。通过在躯干13下端相对的两侧各设有一电机19,从而实现下肢17的两髋关节171分别沿第二竖直面转动,可以使两下肢17分别相对于躯干13转动,进而实现模拟人体双腿的左右抬腿动作。
71.此外,需要说明的是,躯干13的下端相对的两侧的两电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
72.进一步地,结合参照图3,在本技术的一实施例中,在仿人教育机器人100躯干13的上端、上端相对的两侧以及下端相对的两侧设置电机19,可以驱动头部11、上肢15以及下肢17的转动,以实现相应部位的模拟动作。通过把电机19设置于仿人教育机器人100躯干13的中心和对称位置,可以平衡机器人整体重心,以使机器人运动时更加平衡和稳定。
73.此外,需要说明的是,该电机19可以是伺服电机、步进电机、舵机、或其他驱动电机。
74.也即,综上所述,本技术的仿人教育机器人100可以设置十七个电机19,均可与主控板连接,上述电机19均可被编程控制,形成仿人教育机器人100动作的多样性。通过如此设置,不仅可以由主控板集中控制多个电机19,以简化结构,方便控制电机19的转动,还可以由主控板集中处理各种动作程序,从而生成相同或不同的执行指令,以控制多个电机19执行相同或不同的转动角度,进而使仿人教育机器人100实现多种动作。
75.结合参照图1和图2,在本技术的一实施例中,仿人教育机器人100设有传感器模块14,传感器模块14可拆卸连接于仿人教育机器人100,传感器模块14包括多个子传感器141,子传感器141可拆卸连接于传感器模块14。通过设置可拆卸连接的传感器模块14,可以方便地根据需求安装传感器模块14,从而拓展仿人教育机器人100的功能。传感器模块14设置多个可拆卸连接的子传感器141,使仿人教育机器人100能够按照需求安装多种相同或不同的传感器,进一步拓展了仿人教育机器人100的执行功能,从而使仿人教育机器人100满足更多的程序执行要求。
76.此外,需要说明的是,传感器可以是激光测距传感器、温度传感器、光线传感器、或其他功能传感器。
77.结合参照图1和图2,在本技术的一实施例中,仿人教育机器人100设有摄像头12。通过设置摄像头12,可以进行图像的采集,以拓展仿人教育机器人100的执行功能。此外,需要说明的是,仿人教育机器人100的摄像头12可以设置在头部11,以模拟人的眼睛,使仿人教育机器人100更加拟人化,也可以设置在躯干13,或者利于功能实现的其他部位。
78.当然,为了更好地实现十七自由度的学习姿态调整,头部、上肢的端部(指的是机器人的手部)、脚掌处形成有多个平面和斜面,多个平面和斜面在运动的各个过程中可以形成更好的支撑效果。
79.综上所述,本技术的仿人教育机器人100可接收外部程序,经由主控板处理,生成相应的指令,该指令控制多个电机19的执行,以驱动仿人教育机器人100的各部件转动,从而使仿人教育机器人100实现多种多样的动作。主控板生成的指令还可以控制仿人教育机器人100的摄像头12和连接在仿人教育机器人100上的传感器模块14,从而控制连接在传感器模块14上的多个子传感器141,使仿人教育机器人100实现图像采集功能和多种子传感器141功能。通过主控板控制电机19、摄像头12以及多个传感器,使电机19、摄像头12以及多个
子传感器141之间可以相互配合,从而使仿人教育机器人100可根据采集的图像和传感器的反馈,执行相应的动作,从而实现仿人教育机器人100的智能化,同时,扩展了程序的执行对象,可满足编程教育的需求。
80.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1