机器人系统的制作方法
1.本公开涉及机器人系统。
背景技术:
2.已经公开了如下方法:在一对板材的角接头焊接中,从斜上方对两板材照射与焊接线正交的狭缝状的激光,并基于所投影的线图像、两板材的交叉角度以及厚度来确定焊枪的最佳位置(例如,参照专利文献1。)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平3-207577号公报
技术实现要素:
6.发明要解决的问题
7.专利文献1的焊枪位置的确定方法是确定焊枪的最佳位置的方法,因此在板材的位置偏移的情况下等,则不能进行正确的焊接。
8.因此,期望适当地校正一对工件的偏移。
9.用于解决问题的方案
10.本公开的一方面提供一种机器人系统,所述机器人系统具备:机器人,其握持相邻配置的第一工件及第二工件中的至少一方;照明装置,其对隔着所述第一工件与所述第二工件的边界的两侧的所述第一工件以及所述第二工件的表面,沿着与所述边界交叉的平面照射狭缝状的光;摄像头,其从相对于所述平面倾斜的方向拍摄图像,所述图像包含形成于所述第一工件的所述表面的所述光的第一线图像、以及形成于所述第二工件的所述表面的所述光的第二线图像;以及机器人控制装置,其基于由该摄像头获取的所述图像中的所述第二线图像相对于所述第一线图像的偏移量以及偏移方向,使所述机器人动作,以校正所述第一工件的所述表面与所述第二工件的所述表面之间的台阶。
附图说明
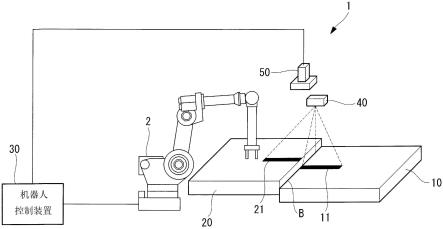
11.图1是本公开的一个实施方式的机器人系统的整体结构图。
12.图2是示出图1的机器人系统中的第一线图像以及第二线图像的位置的图。
13.图3是示出在图1的机器人系统中,第二母材的表面相对于第一母材的表面倾斜的状态的图。
14.图4是示出图3所示的状态下的机器人系统中的第一线图像以及第二线图像的位置的图。
具体实施方式
15.以下参照附图来说明本公开的一个实施方式的机器人系统1。
16.本实施方式的机器人系统1是将平板状的第一母材10与平板状的第二母材20对齐,以使第二母材(第二工件)20以对接的状态配置于第一母材(第一工件)10的一缘端并进行焊接的系统。
17.机器人系统1具备握持第二母材20的机器人2、控制机器人2的动作的机器人控制装置30、照明装置40、以及摄像头50。
18.第一母材10在配置为大致水平的状态下,例如,固定于未图示的作业台。机器人2将所握持的第二母材20大致水平地配置到第一母材10的一缘端附近。
19.照明装置40配置在比第一母材10靠上方的位置,并照射狭缝状的激光。狭缝状的激光在第二母材20与第一母材10相邻而配置的状态下,沿与第一母材10和第二母材20的边界b正交的方向延伸,且沿着相对于第一母材10以及第二母材20的表面以规定的角度倾斜的平面照射。
20.即,激光沿着相对于第一母材10以及第二母材20的表面以小于90
°
的角度倾斜的平面,对第一母材10以及第二母材20的表面照射。
21.由此,在第一母材10的表面形成沿着与边界b正交的方向延伸的第一线图像11,在第二母材20的表面形成沿着与边界b正交的方向延伸的第二线图像21。
22.摄像头50也配置在第一母材10的上方。另外,摄像头50将隔着边界b而形成在两侧的第一线图像11以及第二线图像21配置在视场角内,并获取包含第一线图像11以及第二线图像21这两者的二维图像。
23.机器人控制装置30处理由摄像头50获取的二维图像,并使机器人2进行校正动作。
24.具体地,机器人控制装置30测量二维图像内的第一线图像11与第二线图像21之间的偏移量以及偏移方向,并将测量出的偏移量乘以规定的常数来计算校正量。然后,机器人控制装置30控制机器人2,使第二母材20向与测量出的偏移方向相反的一侧移动所计算出的校正量。
25.二维图像内的第一线图像11与第二线图像21之间的偏移方向是通过在二维图像内第二线图像21相对于第一线图像11向哪个偏移方向偏移来测量的。图2是在附图标记40的位置配置有照明装置40时的二维图像的例子。在该二维图像内,在左侧的第二线图像21相对于右侧的第一线图像11配置在上侧的情况下,可知第二母材20相对于第一母材10向上方偏移。反过来,在二维图像内,在左侧的第二线图像21相对于右侧的第一线图像11配置在下侧的情况下,可知第二母材20相对于第一母材10向下方偏移。
26.另外,二维图像内的第一线图像11与第二线图像21之间的偏移量是通过二维图像内的第一线图像11与第二线图像21之间的像素数来测量的。通过像素数测量的二维图像内的第一线图像11与第二线图像21之间的偏移量、与第一母材10与第二母材20之间的实际的偏移量之间的换算系数是预先大致设定好的。
27.在本实施方式中,为了计算校正量而与像素数相乘的常数是将换算系数乘以规定的小数而得到的数。
28.以下对以如上方式构成的本实施方式的机器人系统1的作用进行说明。
29.根据本实施方式的机器人系统1,如图1所示,当机器人2将第二母材20配置在与第一母材10的一缘端相邻的位置时,通过照明装置40照射狭缝状的激光。
30.由此,从照明装置40射出的激光在第一母材10以及第二母材20的表面形成沿着与
边界b正交的方向延伸的第一线图像11以及第二线图像21。
31.激光相对于第一母材10以及第二母材20的表面以小于90
°
的角度倾斜,因此当第一母材10以及第二母材20在板厚方向上偏移时,第一线图像11和第二线图像21在沿着边界b的方向上相互偏移而形成。
32.在该状态下,通过使摄像头50工作,获取如图2所示的二维图像,并发送给机器人控制装置30。
33.从摄像头50发送来的二维图像由机器人控制装置30处理。
34.由此,测量出二维图像内的第一线图像11与第二线图像21之间的像素数。接着,通过将所测量出的像素数乘以常数来计算测量出的像素数所对应的校正量,该常数是将正小数和、单位像素与第一母材10及第二母材20中的实际的偏移量之间的换算系数相乘而得到的数。
35.另外,二维图像内的第二线图像21相对于第一线图像11的偏移方向被检测为第二母材20相对于第一母材10在上下任意方向上偏移的偏移方向。机器人控制装置30将与检测出的第一母材10和第二母材20的偏移方向相反的方向确定为校正方向。
36.并且,机器人控制装置30使机器人2向所确定的校正方向动作所计算出的校正量。
37.此时,即使在与像素数相乘的换算系数的值不准确的情况下或者在机器人2的动作量相对于控制指令存在误差的情况下,通过乘以正小数,也能够使计算出的校正量小于实际的偏移量。由此,使得第二母材20的表面不会超过第一母材10的表面,第一母材10与第二母材20之间的偏移量得到校正。
38.进一步地,机器人控制装置30再次检测校正后的第一母材10与和第二母材20之间的偏移量,并与预先存储的规定的阈值进行比较。
39.其结果是,在检测出的校正后的第一母材10与和第二母材20之间的偏移量大于阈值的情况下,机器人控制装置30基于所检测出的校正后的第一母材10和第二母材20之间的偏移量以及偏移方向,再次使机器人2动作。
40.由此,第一母材10与第二母材20之间的偏移量与上次的校正后相比进一步降低。
41.这样,通过重复校正动作直到第一线图像11与第二线图像21之间的偏移量小于规定的阈值,使得第一母材10与第二母材20之间的偏移量逐渐被校正。另外,即使重复该校正动作,校正的方向也不会反转而是被限定于同一方向,因此不仅能够准确地校正第一母材10与第二母材20之间的台阶,还能够简化校正的控制方法。
42.这样,根据本实施方式的机器人系统1,能够将第一母材10以及第二母材20的相对位置校正到对于对接焊接来说最佳的状态,从而能够实施良好的焊接。
43.此外,在本实施方式中,机器人控制装置30基于二维图像内的第一线图像11与第二线图像21之间的偏移量计算机器人2的校正量。取而代之,机器人控制装置30也可以基于二维图像内的第一线图像11与第二线图像21之间的偏移量所对应的实际空间中的三维坐标信息计算机器人2的校正量。
44.在这种情况下,需要预先对摄像头50进行校准。如果对摄像头50进行了校准,则能够求出二维图像上的任意位置作为三维视线。而且,需要预先对摄像头50与照明装置40照射的狭缝光之间的位置关系进行校准。照明装置40照射的狭缝光可以定义为平面。预先测量该平面与摄像头50之间的位置关系并将其存储到校准信息中即可。通过取在二维图像上
检测出的第一线图像11和第二线图像21上的任意一点的视线与狭缝光的平面的交点,能够求出第一线图像11和第二线图像21上的任意一点的三维位置信息。由此,能够得到第一线图像11和第二线图像21上的三维线图像。
45.因此,机器人控制装置30能够将二维图像内的第一母材10与第二母材20的边界b处的第一线图像11与第二线图像21之间的偏移量以及偏移方向换算为实际空间中的三维偏移量以及偏移方向。并且,机器人控制装置30使机器人2动作基于换算后的三维偏移(偏移量以及偏移方向)而计算出的校正量。
46.其结果是,能够更准确地校正第一母材10与第二母材20之间的偏移。
47.另外,在本实施方式中,机器人控制装置30基于二维图像内的第一线图像11与第二线图像21之间的偏移量以及偏移方向,校正了第一母材10的表面和第二母材20的表面在板厚方向上的偏移量。另外,还可以基于第二线图像21相对于第一线图像11的倾斜来校正第一母材10的表面与第二母材20的表面之间的倾斜。
48.例如,如图3及图4所示,在第二母材20的表面相对于第一母材10的表面倾斜而配置的情况下,对应于第一母材10的表面与第二母材20的表面之间的倾斜,第二线图像21也形成为相对于第一线图像11倾斜。
49.机器人控制装置30预先基于激光的照射角度以及摄像头50的位置信息,使第一线图像11和第二线图像21所成的角度与第二母材20的表面相对于第一母材10的表面的倾斜方向以及倾斜角度相关联。而且,机器人控制装置30通过基于第一线图像11和第二线图像21所成的角度使机器人2动作,能够校正第一母材10的表面与第二母材20的表面之间的倾斜。
50.在这种情况下,由机器人2对第二母材20的倾斜的校正例如优选将机器人2的工具前端点配置在与边界b相邻的第二母材20的缘端上,并使第二母材20绕沿着第二母材20的缘端延伸的坐标轴旋转来进行。由此,无需使与边界b接近的第二线图像21的顶端位置移动,就能够使第二线图像21的倾斜与第一线图像11平行。
51.之后,通过进行使第一线图像11和第二线图像21一致的上述校正,能够使第一母材10和第二母材20精确地对齐,从而能够实施更适当的焊接。
52.另外,在本实施方式中例示了第一母材10以及第二母材20为平板状的母材,但不限于此,也可以是任意形状的母材。
53.另外,在本实施方式中例示了通过像素数来求出二维图像内的第一线图像11与第二线图像21之间的偏移量,并且通过乘以将换算系数与正小数相乘后得到的常数来求出校正量,但取而代之,也可以使用将换算系数与1以上的系数相乘后得到的常数。
54.在这种情况下,虽然由机器人2进行的校正动作是振动的,但有时也能够更迅速地定位。
55.另外,本实施方式例示了对第一母材10和第二母材20进行对接焊接的机器人系统,但不限于此,只要是需要对齐相邻的工件的表面的台阶的作业,则可以是进行任何作业的机器人系统。
56.附图标记说明:
57.1机器人系统
58.2机器人
59.10第一母材(第一工件)
60.11第一线图像
61.20第二母材(第二工件)
62.21第二线图像
63.30机器人控制装置
64.40照明装置
65.50摄像头
66.b边界
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1