一种物流分拣用机器人抓手的制作方法
1.本发明属于物流设备技术领域,具体为一种物流分拣用机器人抓手。
背景技术:
2.物流原意为“实物分配”或“货物配送”,是供应链活动的一部分,是为了满足客户需要而对商品、服务消费以及相关信息从产地到消费地的高效、低成本流动和储存进行的规划、实施与控制的过程。物流以仓储为中心,促进生产与市场保持同步,物流是为了满足客户的需要,以最低的成本,通过运输、保管、配送等方式,实现原材料、半成品、成品及相关信息由商品的产地到商品的消费地所进行的计划、实施和管理的全过程。
3.但是现有技术中,实际物流进行分拣过程中多通过滑轨方式进行货物的分类输送,而滑轨移动速度和货物整体质量影响实际分拣效果,容易导致货物意外脱离滑轨和货物分拣转向不足堆积阻塞,进而导致实际进行货物分类过程中需要进行空间位置调节时,往往需要增添额外分类整理,导致整体工作效率较低。
技术实现要素:
4.本发明的目的在于:提供一种能够配合现有滑轨高效稳定的进行物品的分拣,同时能够及时进行货物空间上的位置移动调节,提高实际分拣效率的一种物流分拣用机器人抓手。
5.本发明采用的技术方案如下:一种物流分拣用机器人抓手,包括:功能机构,所述功能机构包括外框、定位部件和夹取部件,所述外框顶部固定连接有第一转管,所述第一转管内部滑动插设有顶杆,所述第一转管顶部转动连接有连动锥形齿轮,所述第一转管外表面套设有限位板和控制齿轮,所述限位板外表面滑动套设有两个限位轮,所述外框顶部固定连接有两个固定架,所述定位部件设置于外框上,所述夹取部件设置于定位部件上;以及调节机构,所述调节机构包括安装框,所述安装框转动连接于外框顶部,所述安装框内部顶面固定连接有两个限位块,每个所述限位块一侧外表面和对应安装框一侧内表壁之间均转动连接有连动杆,每个所述连动杆外表面均套设有控制锥形齿轮,两个所述控制锥形齿轮和连动锥形齿轮均啮合,每个所述连动杆外表面均开设有外螺纹,每个所述连动杆均通过外螺纹连接有移动杆,每个所述移动杆底端和对应限位轮顶部均转动连接,其中一个所述连动杆外表面套设有第三蜗轮,所述安装框两侧相对内表壁之间转动连接有第三蜗杆,所述第三蜗杆和第三蜗轮啮合,所述安装框顶部贯穿有限位管。
6.其中,所述定位部件包括安装架,所述安装架固定连接于外框两侧相对内表壁之间,所述安装架和顶杆卡接,所述安装架内部顶面转动连接有第二转管,所述第二转管和顶杆螺纹连接,所述第二转管外表面套设有第一蜗轮。
7.其中,所述安装架内部顶面转动设置有第一蜗杆,所述第一蜗杆和第一蜗轮啮合。
8.其中,所述夹取部件包括旋转框和两个转杆,两个所述转杆分别转动连接于两个限位轮底部,每个所述转杆底部均固定连接有滑管,所述旋转框转动连接于安装架底部,所
述旋转框内部底面固定连接有电机,所述旋转框一侧外表面螺纹连接有双向螺纹杆,所述双向螺纹杆两端分别延伸至对应滑管内部,所述双向螺纹杆外表面螺纹连接有两个夹板。
9.其中,所述旋转框两侧外表面均固定连接有两个滑杆,每个所述滑杆一端均滑动贯穿对应夹板。
10.其中,所述双向螺纹杆外表面套设有第二蜗轮,所述旋转框一侧外表面固定连接有支撑架,所述支撑架两侧相对内表壁之间转动连接有第二蜗杆,所述第二蜗杆和第二蜗轮啮合。
11.其中,所述第二蜗杆外表面套设有移动锥形齿轮,所述电机的输出端也套设有移动锥形齿轮,两个所述移动锥形齿轮啮合。
12.其中,每个所述限位轮外表面均套设有旋转齿轮,两个所述旋转齿轮和控制齿轮均啮合。
13.其中,所述外框顶部开设有两个限位槽,每个所述限位槽内部和外框内部均连通。
14.其中,所述顶杆顶端延伸至限位管内部,所述限位管一侧内表壁开设有滑槽,所述顶杆顶端转动连接有抵片,所述抵片一侧外表面固定连接有滑块,且滑块一端延伸至滑槽内部。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:本发明中,使用时,通过固定架使设备能够稳固与机器人本体进行连接,通过控制机器人本体将设备移送至现有分拣滑轨预分拣端,此时机器人本体输出端将延伸至限位管内部,进而通过旋转调节第一蜗杆,进而使第一蜗杆能够有效通过第一蜗轮带动第二转管进行旋转,使旋转的第二转管能够有效移动顶杆使用位置,进而使顶杆能够挤压抵片贴合机器人本体的输出端,使机器人本体的输出端能够有效带动抵片进行旋转,当抵片发生旋转时,在滑块和滑槽的位置限制下,使抵片能够有效带动限位管进行旋转,进而使限位管有效带动安装框进行旋转,旋转的安装框能够在限位板和控制齿轮的位置限制下,使移动杆能够带动限位轮进行位置移动,进而通过转杆能够便捷进行双向螺纹杆放置方向的调节,进而能够有效调节两个夹板使用角度,进而使两个夹板能够有效进行预分拣货物在现有滑轨顶部移动方向的限制,进而使货物能够精确平稳进入分拣轨道,确保货物不易脱离滑轨,提高货物分拣的安全性,同时当需要进行货物空间位置移动时,通过控制启动电机,进而使电机能够通过移动锥形齿轮带动第二蜗杆进行旋转,进而使第二蜗杆配合第二蜗轮能够有效带动双向螺纹杆进行旋转,进而使双向螺纹杆能够有效移动调节两个夹板使用位置,进而对货物进行有效夹持,进而机器人本体能够有效进行货物的空间位置转移,使设备能够高效进行应有功能的实现,提高整体分拣效率。
附图说明
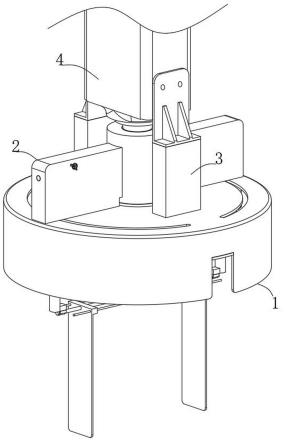
16.图1为本发明的正视立体图;图2为本发明的正视剖视立体图;图3为本发明的功能机构正视剖视立体图;图4为本发明的图3中a部分放大图;图5为本发明的图3中b部分放大图;图6为本发明的功能机构仰视剖视立体图;
图7为本发明的图6中c部分放大图;图8为本发明的调节机构正视剖视立体图。
17.图中标记:1、功能机构;101、外框;102、第一转管;103、连动锥形齿轮;104、顶杆;105、限位板;106、控制齿轮;107、限位轮;108、转杆;109、安装架;110、旋转框;111、电机;112、双向螺纹杆;113、第二蜗轮;114、第二蜗杆;115、滑杆;116、夹板;117、滑管;118、第二转管;119、第一蜗轮;120、第一蜗杆;2、调节机构;201、安装框;202、连动杆;203、控制锥形齿轮;204、第三蜗轮;205、第三蜗杆;206、移动杆;207、限位管;3、固定架;4、机器人本体。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
19.实施例一参照图1-图8:一种物流分拣用机器人抓手,包括功能机构1和调节机构2,功能机构1包括外框101、定位部件和夹取部件,通过外框101的设立提供设备其他功能部件设置的安装基础,同时能够有效为设备其他功能部件提供有效防护,外框101顶部固定连接有第一转管102,通过第一转管102的设立方便进行设备其他功能部件的安装设置,第一转管102内部滑动插设有顶杆104,通过顶杆104的设立能够有效移动调节抵片使用高度,第一转管102顶部转动连接有连动锥形齿轮103,通过连动锥形齿轮103的设立配合控制锥形齿轮203使两个连动杆202能够同时旋转,第一转管102外表面套设有限位板105和控制齿轮106,通过限位板105的设立配合控制齿轮106能够有效限制限位轮107的位置移动,限位板105外表面滑动套设有两个限位轮107,限位轮107的设立方便进行设备其他功能部件的安装设置,外框101顶部固定连接有两个固定架3,固定架3的设立使设备能够稳固与机器人本体4进行连接,定位部件设置于外框101上,夹取部件设置于定位部件上,以及调节机构2包括安装框201,通过安装框201的设立方便进行设备其他功能部件的安装设置,安装框201转动连接于外框101顶部,安装框201内部顶面固定连接有两个限位块,通过限位块的设立方便进行连动杆202的安装设置,每个限位块一侧外表面和对应安装框201一侧内表壁之间均转动连接有连动杆202,通过连动杆202的设立能够有效进行移动杆206位置移动调节,每个连动杆202外表面均套设有控制锥形齿轮203,通过控制锥形齿轮203的设立配合连动锥形齿轮103使两个连动杆202能够同时旋转,两个控制锥形齿轮203和连动锥形齿轮103均啮合,每个连动杆202外表面均开设有外螺纹,通过外螺纹的设立使同时旋转的连动杆202能够使移动杆206进行相反方向位置移动,每个连动杆202均通过外螺纹连接有移动杆206,移动杆206的设立能够有效移动调节限位轮107的位置移动,每个移动杆206底端和对应限位轮107顶部均转动连接,其中一个连动杆202外表面套设有第三蜗轮204,通过第三蜗轮204的设立使第三蜗杆205能够有效带动连动杆202进行旋转,安装框201两侧相对内表壁之间转动连接有第三蜗杆205,第三蜗杆205和第三蜗轮204啮合,安装框201顶部贯穿有限位管207,通过限位管207的设立能够使抵片带动安装框201进行旋转。
20.参照图3-图8:定位部件包括安装架109,通过安装架109的设立方便进行设备其他功能部件的安装设置,安装架109固定连接于外框101两侧相对内表壁之间,安装架109和顶
杆104卡接,安装架109内部顶面转动连接有第二转管118,通过第二转管118的设立能够有效移动控制顶杆104使用高度,第二转管118和顶杆104螺纹连接,第二转管118外表面套设有第一蜗轮119,通过第一蜗轮119的设立使第一蜗杆120能够有效带动第二转管118进行旋转,安装架109内部顶面转动设置有第一蜗杆120,第一蜗杆120和第一蜗轮119啮合,夹取部件包括旋转框110和两个转杆108,通过旋转框110的设立方便进行设备其他功能部件的安装设置,通过转杆108的设立配合滑管117能够有效旋转调节双向螺纹杆112使用方向,两个转杆108分别转动连接于两个限位轮107底部,通过限位轮107的设立方便进行设备其他功能部件的安装设置,同时使移动杆206能够带动转杆108进行位置移动,每个转杆108底部均固定连接有滑管117,通过滑管117的设立使双向螺纹杆112能够有效进行使用方向的调节,旋转框110转动连接于安装架109底部,旋转框110内部底面固定连接有电机111,通过电机111的设立提供双向螺纹杆112旋转所需动力,旋转框110一侧外表面螺纹连接有双向螺纹杆112,通过双向螺纹杆112的设立能够有效移动调节夹板116的使用位置,双向螺纹杆112两端分别延伸至对应滑管117内部,双向螺纹杆112外表面螺纹连接有两个夹板116,通过夹板116的设立使设备能够有效对货物的位置移动进行限制,同时能够有效进行货物的夹取,旋转框110两侧外表面均固定连接有两个滑杆115,通过滑杆115的设立能够有效限制夹板116的位置移动方向,每个滑杆115一端均滑动贯穿对应夹板116,双向螺纹杆112外表面套设有第二蜗轮113,通过第二蜗轮113的设立使配合第二蜗杆114使电机111能够有效带动双向螺纹杆112进行旋转,旋转框110一侧外表面固定连接有支撑架,通过支撑架的设立方便进行第二蜗杆114的安装设置,支撑架两侧相对内表壁之间转动连接有第二蜗杆114,第二蜗杆114和第二蜗轮113啮合,第二蜗杆114外表面套设有移动锥形齿轮,通过移动锥形齿轮的设立使电机111能够有效带动双向螺纹杆112进行旋转,电机111的输出端也套设有移动锥形齿轮,两个移动锥形齿轮啮合,每个限位轮107外表面均套设有旋转齿轮,通过旋转齿轮的设立能够有效限制限位轮107的位置移动,两个旋转齿轮和控制齿轮106均啮合,外框101顶部开设有两个限位槽,通过限位槽的设立能够有效限制移动杆206的位置移动,每个限位槽内部和外框101内部均连通,顶杆104顶端延伸至限位管207内部,限位管207一侧内表壁开设有滑槽,通过滑槽的设立配合滑块使抵片能够带动限位管207进行旋转,顶杆104顶端转动连接有抵片,抵片一侧外表面固定连接有滑块,且滑块一端延伸至滑槽内部。
21.使用时,通过固定架3使设备能够稳固与机器人本体4进行连接,通过控制机器人本体4将设备移送至现有分拣滑轨预分拣端,此时机器人本体4输出端将延伸至限位管207内部,进而通过旋转调节第一蜗杆120,进而使第一蜗杆120能够有效通过第一蜗轮119带动第二转管118进行旋转,使旋转的第二转管118能够有效移动顶杆104使用位置,进而使顶杆104能够挤压抵片贴合机器人本体4的输出端,使机器人本体4的输出端能够有效带动抵片进行旋转,当抵片发生旋转时,在滑块和滑槽的位置限制下,使抵片能够有效带动限位管207进行旋转,进而使限位管207有效带动安装框201进行旋转,旋转的安装框201能够在限位板105和控制齿轮106的位置限制下,使移动杆206能够带动限位轮107进行位置移动,进而通过转杆108能够便捷进行双向螺纹杆112放置方向的调节,进而能够有效调节两个夹板116使用角度,进而使两个夹板116能够有效进行预分拣货物在现有滑轨顶部移动方向的限制,进而使货物能够精确平稳进入分拣轨道,确保货物不易脱离滑轨,提高货物分拣的安全性,同时当需要进行货物空间位置移动时,通过控制启动电机111,进而使电机111能够通过
移动锥形齿轮带动第二蜗杆114进行旋转,进而使第二蜗杆114配合第二蜗轮113能够有效带动双向螺纹杆112进行旋转,进而使双向螺纹杆112能够有效移动调节两个夹板116使用位置,进而对货物进行有效夹持,进而机器人本体4能够有效进行货物的空间位置转移,使设备能够高效进行应有功能的实现,提高整体分拣效率。
22.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1