节拍调整方法和工业机器人与流程
本技术涉及工业机器人,具体而言,涉及一种节拍调节方法和一种工业机器人。
背景技术:
1、目前,工业机器人在运行过程中,为了保证生产安全,会根据设定的最大负载值以定义对应的生产节拍,但在实际使用过程中,实际的负载会远远低于额定负载,在此基础上仍以额定负载对应的生产节拍工作,会降低生产效率。
技术实现思路
1、本技术旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、有鉴于此,本技术第一方面的实施例提供了一种节拍调整方法。
3、本技术第二方面的实施例提供了一种工业机器人。
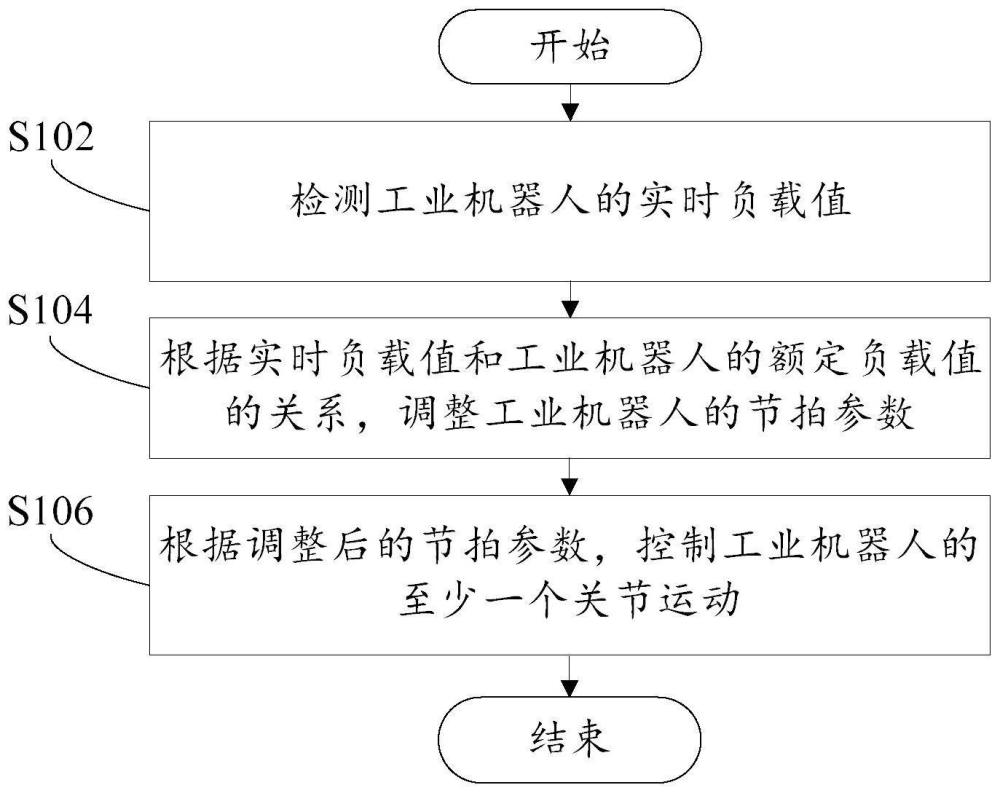
4、为了实现上述目的,本技术第一方面的实施例提供了一种节拍调整方法,包括:检测工业机器人的实时负载值;根据实时负载值和工业机器人的额定负载值的关系,调整工业机器人的节拍参数;根据调整后的节拍参数,控制工业机器人的至少一个关节运动。
5、根据本技术的实施例提供的节拍调整方法,会根据工业机器人实际抓取的负载的具体质量确定对应的节拍参数,从而可提高工业机器人的生产效率。具体地,先对工业机器人的实时负载值进行检测,再通过将实时负载值与提前设定好的额定负载值进行比较,根据实时负载值的大小,对节拍参数会进行适应性调节,一般来说,无论实际负载值大还是小,均会采用大于实际负载值的额定负载值所对应的节拍参数。需要强调的,本技术则是在此基础上,进一步优化节拍参数的确定,具体为根据实时负载值和额定负载值的关系,在原节拍参数的基础上进行调整,在实际使用过程中,实时负载值通常会远低于额定负载值,通过根据实际抓取的物体的实时负载值的大小,可确定与之对应的节拍参数,进而根据调整后的节拍参数控制工业机器人中的一个或多个关节进行运动,从而可实现对物体的抓取和放下的周期循环,即可提高工业机器人的生产节拍,从而极大的提高生产效率。
6、还需补充的是,本技术的实时负载值在工业机器人运行的过程中,也可以调节,例如用户在实际使用工程中,发现抓取的物体过多,或抓取对象错误,可直接将多余的物体拿出,或暂停后替换抓取的物体,随后,本方案会重新检测工业机器人的实时负载值,即在调整前后工业机器人的实时负载值是不同的,会对应调整不同的节拍参数,保证节拍参数满足生产效率最大化的要求。
7、其中,额定负载值为工业机器人可抓取物体的最大重量。
8、可以理解,节拍参数为机器人完成一个周期对物品的抓取并在指定位置放下,所用的时间,即周期时间。
9、上述技术方案中,根据实时负载值和工业机器人的额定负载值的关系,调整工业机器人的节拍参数,具体包括:判断实时负载值和额定负载值的大小关系;若实时负载值小于额定负载值,降低节拍参数。
10、在该技术方案中,在对节拍参数进行调整时,主要需要对实时负载值和额定负载值的大小关系进行判断,当实际抓取的物体的实时负载值小于额定负载值时,会直接降低节拍参数,即缩短周期时间,此时工业机器人的抓取频率会加快,从而可提高生产效率。
11、可以理解,实时负载值和额定负载值的大小判断可直接通过比较器或控制器内置的算法实现。
12、当实时负载值大于额定负载值,此时工业机器人会发出警告,提醒超载,或者将额定负载值调整到更高的档位。
13、若实时负载值等于额定负载值,则可根据当前的节拍参数继续运行即可。
14、上述技术方案中,额定负载值的数量为多个,根据实时负载值和工业机器人的额定负载值的关系,调整工业机器人的节拍参数,具体包括:根据多个额定负载值确定多个负载区间;根据实时负载值所在的负载区间,确定节拍参数。
15、在该技术方案中,对于一个工业机器人而言,可设定多个额定负载值,相当于多个档位,不同的额定负载值对应于不同重量的物体,在对节拍参数进行调整的过程中,需要先根据预先设定好的多个额定负载值确定出多个负载区间,根据具体抓取对象的实时负载值找到所在的负载区间,最终根据该负载区间即可确定出对应的节拍参数。
16、本方案中,负载区间的两端分别可由两个额定负载值进行确认,多个额定负载值可组成多种负载区间,可根据实际设计需求和使用需求灵活确定。
17、需要补充的是,节拍参数和负载区间可以是一一对应的关系,即一个负载区间对应一个节拍参数,还可以是一个负载区间对应多个节拍参数,可根据实际负载值在对应负载区间的位置找到对应的节拍参数,例如实际负载值为6kg,对应的负载区间为5kg~10kg,5kg对应的节拍参数为10s,10kg对应的节拍参数为15s,于实际负载值对应的节拍参数可以为12s,此时即为6kg在5kg~10kg的负载区间内的范围所对应的节拍参数,当然,也可以为上限额定负载值对应的节拍参数15s。
18、上述技术方案中,根据多个额定负载值确定多个负载区间,具体包括:将多个额定负载值根据数值大小的顺序进行排列,生成排序表;根据排序表中任意相邻的两个额定负载值确定对应的负载区间。
19、在该技术方案中,在确定负载区间时,需要对多个提前设定好的额定负载值进行排序,生成排序表,此时可轻易地确定出负载区间的构成,例如额定负载值从小到大依次是a1、a2、a3、a4,负载区间则为(0,a1)、(a1,a2)、(a2,a3)、(a3,a4)、(a4,+∞)。
20、上述技术方案中,根据调整后的节拍参数,控制工业机器人的至少一个关节运动,具体包括:根据调整后的节拍参数,确定每个关节的转动加速度与行程的对应关系;根据关节的实时行程和对应关系控制关节转动。
21、在该技术方案中,在控制工业机器人的关节进行运动时,先根据确定好的节拍参数,对每个关节的转动加速度和行程的关系进行确定,即对应于不同的关节,具体的转动方式并不相同,会随着行程的变化调整转动加速度,在移动到不同的位置时,会实时调整转动加速度,可提高工业机器人的取放效率,从而提高生产效率。
22、上述技术方案中,对应关系为实时行程处于总行程的0至80%,转动加速度为正,实时行程处于总行程的80%至100%,转动加速度为负。
23、在该技术方案中,对于每个关节而言,在移动到前80%时,关节保持加速状态,即转动加速度为正,而移动到后20%时,则需要减速,即转动加速度为负,从而可保证关节在转动时更符合调整后的节拍参数,提高生产效率。
24、本技术第二方面的实施例提供了一种工业机器人,包括底座;至少一个机械臂,与底座传动连接;抓取组件,与机械臂相连,抓取组件用于抓取负载;控制器,用于执行如上述任一节拍调整方法的步骤。
25、根据本技术提供的工业机器人,包括底座、机械臂、抓取组件以及控制器,机械臂的数量可以为一个,也可以为多个,当采用一个机械臂的情况下,会直接连接到底座上,具体为转动连接,当采用多个机械臂的情况下,其中一个机械臂转动连接到底座上,剩余的机械臂依次转动连接到上一个机械臂上,从而实现与底座的传动连接,最终在机械臂的末端,还设置有用于抓取负载的抓取组件,在控制器的作用下可控制机械臂、抓取组件的转动,从而提高生产效率。
26、需要说明的是,由于工业机器人的控制器会执行上述任一节拍调整方法的步骤,故而具有上述任一节拍调整方法的有益效果。
27、上述技术方案中,机械臂的数量为多个,机械臂和底座相连的部分形成一个关节,两个机械臂相连的部分形成一个关节,抓取组件与机械臂相连的部分形成一个关节,抓取组件中用于抓取负载的部分形成一个关节。
28、在该技术方案中,在选用多个机械臂的情况下,关节会形成在机械臂和底座相连的部分、两个机械臂相连的部分、抓取组件和机械臂相连的部分以及抓取组件中抓取负载的部分,这些位置的关节会进行旋转,从而实现最终对物体的抓取和放下。
29、上述技术方案中,抓取组件包括:相配合的丝杆轴和螺母,螺母旋转,丝杆轴能够沿轴向产生运动。
30、在该技术方案中,对于抓取组件而言,主要包括有丝杆轴和螺母,在螺母旋转是,丝杆轴会产生轴向运动,从而实现对物体的抓取和放下。
31、上述技术方案中,抓取组件上设有重量传感器,重量传感器用于检测抓取组件所抓取的负载的重量值。
32、在该技术方案中,通过在抓取组件上设置重量传感器,可对抓取组件抓取的负载的重量值进行检测,即检测实时负载值。
33、本技术的附加方面和优点将在下面的描述部分中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!