一种冗余型机械手自主自适应轨迹规划方法
本发明涉及机械手,特别涉及一种冗余型机械手自主自适应轨迹规划方法。
背景技术:
1、冗余型机械手是可以进行自动化搬运作业的工业机器人。搬运作业是指用一种设备握持工件,从一个加工位置移到另一个加工位置。冗余型机械手可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。冗余型机械手被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等生产场景的自动搬运,它们有力地推动了汽车、电子、物流等传统制造业的快速发展。
2、目前轨迹规划主要根据已知特定任务进行特定的轨迹规划,但是当工厂里有多种不同作业任务则需要多次人为轨迹规划,且同一作业任务常常也存在零件公差带来的轨迹变化,这极大地影响了中小型企业柔性化加工作业的应用效率。如何适应当前柔性加工潮流下,实现自主自适应智能轨迹规划是当前轨迹规划现存问题之一。
技术实现思路
1、本发明的目的在于,提供一种冗余型机械手自主自适应轨迹规划方法。本发明有效的解决了轨迹自主自适应规划、轨迹规划结果验证等问题,保证冗余型机械手高速、低抖动地运行,更加适应行业柔性化、高生产节拍发展需求,满足高速运行状态下冗余型机械手轨迹的快速优化。
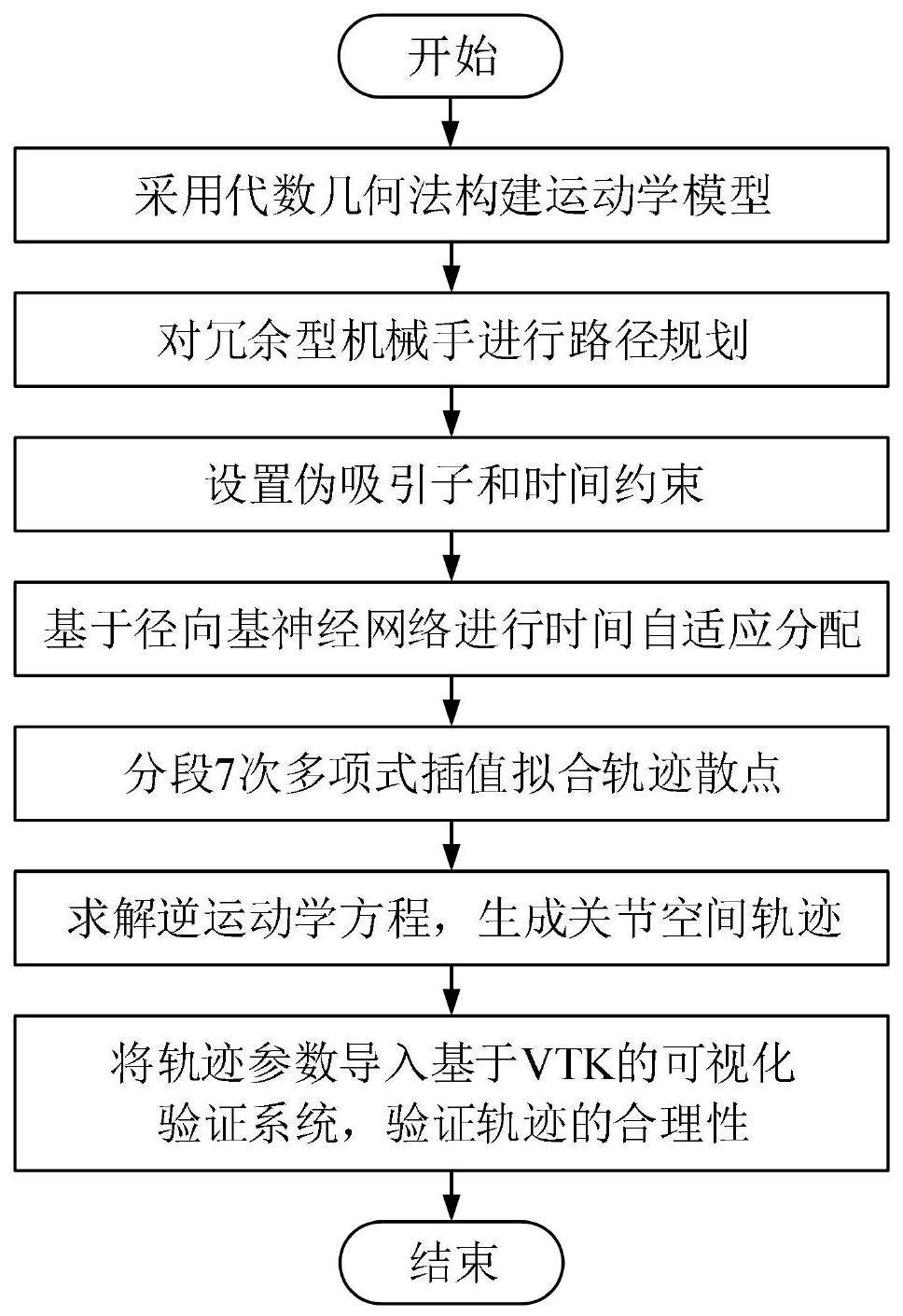
2、本发明的技术方案:一种冗余型机械手自主自适应轨迹规划方法,包括如下步骤:
3、s101:基于代数几何法建立冗余型机械手的运动学模型,根据运动学模型得到冗余型机械手的结构参数和工作空间;根据冗余型机械手的结构参数和工作空间,对末端执行器进行路径规划;
4、s102:依据冗余型机械手路径规划结果和任务需求,设置相应的伪吸引子和时间约束,建立冲击最优化轨迹问题的目标函数,选取若干轨迹点作为参数输入径向基神经网络,由径向基神经网络输出轨迹散点;
5、s103:基于分段7次多项式插补算法拟合径向基神经网络输出的轨迹散点;
6、s104:求解逆运动学方程获得关节空间轨迹;将轨迹参数导入基于vtk的可视化验证系统,验证轨迹的合理性。
7、上述的冗余型机械手自主自适应轨迹规划方法,所述结构参数和工作空间获取包括如下步骤:
8、s1011:根据冗余型机械手结构建立笛卡尔空间坐标系;
9、s1012:构建的冗余型机械手在坐标系中的正运动学模型,所述正运动学模型公式如下所示;
10、y=-l2sinr2-(d4-l3)sin(r2+r3)-l5sin(r2+r3+r5)
11、z=d0+d1+l2 cosr2+(d4-l3)cos(r2+r3)+l5 cos(r2+r3+r5)
12、r2+r3+r5+r6=π
13、-l2sinr2+l3sin(r2+r3)=0;
14、式中:y为末端执行器参考点y方向位移;l2为送进摆臂的长度,r2为送进摆臂与下滑板之间的夹角;d4为伸缩滑板和伸缩摆臂的总长度;l3为伸缩摆臂的长度;r3为伸缩滑板与送进摆臂延长线之间的夹角;l5为送料臂的长度;r5为送料臂与伸缩滑板延长线之间的夹角;z为末端执行器参考点z方向位移;d0为下滑板的初始位置;d1为下滑板相对于初始位置的位移;r6为末端执行器与坐标系z方向的夹角;
15、s1013:针对正运动学模型公式进行逆运动学分析,得到冗余型机械手的结构参数和工作空间如下所示:
16、r2=arcsin((y-l5sin(π-r6))/((d4-l3)l2/l3+l2))
17、r3=π-arcsin(l2sinr2/l3)-r2
18、r5=π-(r2+r3+r6)
19、d1=z-(l2cosr2+(d4-l3)cos(r2+r3)+l5cos(r2+r3+r6)+d0)。
20、前述的冗余型机械手自主自适应轨迹规划方法,所述末端执行器的路径规划是设置冗余型机械手在笛卡尔空间z方向上一系列关键路径点z=[z0,z1,...,zn-1,zn],基于一系列预设的n+1个离散路径点,将整个工作路径划分为n段,当z方向的轨迹规划完毕,即可确定y方向的轨迹时间节点。
21、前述的冗余型机械手自主自适应轨迹规划方法,所述步骤s102的具体过程如下:
22、s1021、依据压力机的行程和工作环境中的障碍物,针对路径点设置相应的时间约束:
23、timin≤ti≤timax;
24、其中ti为第i个路径点的理想时间节点;
25、s1022、依据每个路径点的时间约束针对其设置相应的伪吸引子:
26、timin≤ti≤timax;
27、其中ti为第i个路径点设置的伪吸引子;
28、s1023、建立径向基神经网络冲击最优化轨迹问题的目标函数,目标函数采用如下公式:
29、
30、其中pi(t)为机械手运动周期内第i段轨迹的表达式;k为轨迹段的数量,m为第i个子轨迹中选择的时间节点数;
31、s1024、对生成的初始轨迹进行优化,以z方向设置评估函数系统总能量,评估函数的公式如下:
32、e2(t)=min(|z(t)(3)|max);
33、其中|z(t)(3)|max为在机械手运动周期内末端执行器z方向轨迹的最大加加速度值;
34、s1025、选取若干轨迹点作为数据集输入径向基神经网络,然后基于半监督学习策略寻找满足约束的最优时间节点。
35、前述的冗余型机械手自主自适应轨迹规划方法,所述步骤s103的具体过程如下:
36、s1031、通过将轨迹散点划分为n段子轨迹,其中第i个子轨迹的多项式插值函数pi表示为:
37、
38、其中t∈[ti-1,ti],是第i个子轨迹的多项式参数,i的取值范围为1到n;
39、第i条子轨迹的速度v、加速度a和加加速度j分别表示为:
40、
41、
42、
43、令s(t)为位移对时间的4阶导数,其公式表示为:
44、
45、s1032、对每段子轨迹设置轨迹两端的约束、子轨迹中间的约束、预设离散轨迹点处的约束、运动参数的约束和总时间的约束;
46、s1033、求解多项式参数求解,通过设置目标函数将将多项式参数求解问题转化为二次规划问题,目标函数如下:
47、
48、前述的冗余型机械手自主自适应轨迹规划方法,所述轨迹两端的约束如下所示:
49、p1(t0)=d0,pn(tn)=dn;
50、v1(t0)=vn(tn)=0;
51、a1(t0)=an(tn)=0;
52、j1(t0)=jn(tn)=0;
53、s1(t0)=sn(tn)=0;
54、所述轨迹中间的约束如下所示:
55、
56、
57、
58、
59、
60、其中m=1,2,...,n-1;
61、所述预设离散轨迹点处的约束如下所示:
62、pi(ti)=di;
63、vi(ti)=vi;
64、ai(ti)=ai;
65、所述运动参数的约束如下所示:
66、dmin≤pm(t)≤dmax;
67、vmin≤vm(t)≤vmax;
68、amin≤am(t)≤amax;
69、jmin≤jm(t)≤jmax;
70、所述时间总时间的约束如下所示:
71、
72、前述的冗余型机械手自主自适应轨迹规划方法,依据步骤s103求解得到的轨迹表达式,结合逆运动学模型,求得运动周期内任意时刻下各关节的位姿。
73、与现有技术相比,本发明具有以下有益效果:
74、1、本发明通过基于伪吸引子和径向基神经网络实现自主自适应轨迹规划,一方面可以通过学习的方式自主探索获取最佳轨迹的时间分配方式,另一方面可以避免求解过程中时间调参的人为干预。
75、2、本发明通过vtk可视化工具包实现了在基于python编程环境下对冗余型机械手轨迹优化的验证,操作过程简单,占用内存小且可提高仿真效率。
76、3、本发明所提方法对工业机器人技术具有良好的参考和应用价值,不仅可以限制机器人末端的冲击,延长机器人的使用寿命,而且可以提高机器人的工作效率,大大缩短工业机器人的初步规划和调试时间,更加适应行业柔性化应用。
- 还没有人留言评论。精彩留言会获得点赞!