机器人与导轨协同的方法、装置及电子设备与流程
本发明涉及机器人,尤其是涉及一种机器人与导轨协同的方法、装置及电子设备。
背景技术:
1、在某些场景中要求机器人的工作范围大,而机器人的臂展不能满足需求,相关技术中,为了扩大机器人的工作范围,可以将机器人放置在导轨上,通过附加的导轨平移扩大机器人的工作范围,然而,该方式中,机器人本体工作在自己的机器人基坐标系中,导轨工作在导轨坐标系中,导轨坐标系与机器人基坐标系不成一体,无法进行协同。
技术实现思路
1、本发明的目的在于提供一种机器人与导轨协同的方法、装置及电子设备,以实现导轨坐标系与机器人基坐标系的协同,便于实现复杂的空间轨迹。
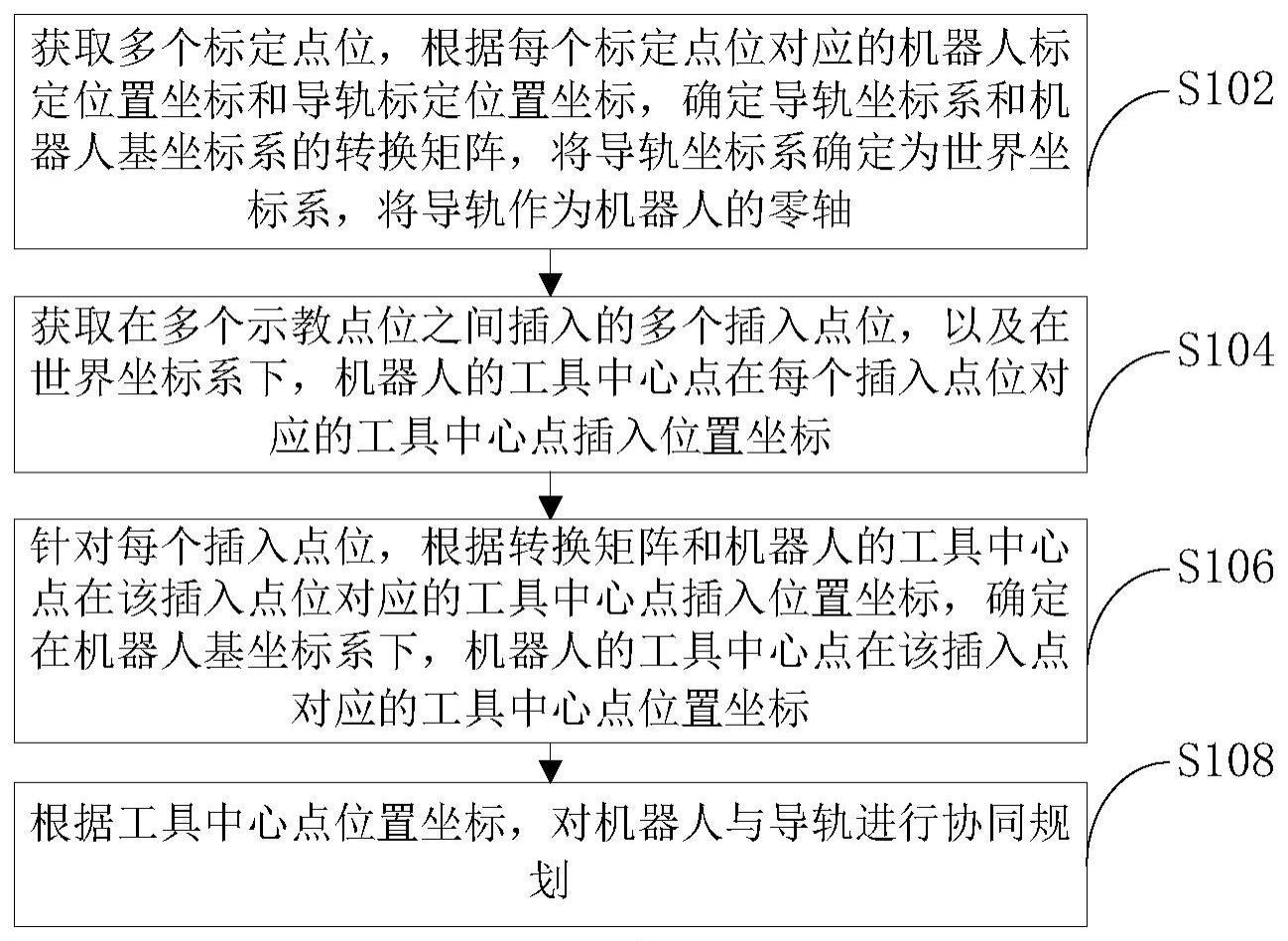
2、本发明提供的一种机器人与导轨协同的方法,机器人设置在导轨上,导轨外部的预设位置设置一测量工具尖点;方法包括:获取多个标定点位,根据每个标定点位对应的机器人标定位置坐标和导轨标定位置坐标,确定导轨坐标系和机器人基坐标系的转换矩阵,将导轨坐标系确定为世界坐标系,将导轨作为机器人的零轴;获取在多个示教点位之间插入的多个插入点位,以及在世界坐标系下,机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标;针对每个插入点位,根据转换矩阵和机器人的工具中心点在该插入点位对应的工具中心点插入位置坐标,确定在机器人基坐标系下,机器人的工具中心点在该插入点对应的工具中心点位置坐标;根据工具中心点位置坐标,对机器人与导轨进行协同规划。
3、进一步的,获取多个标定定位的步骤之后,方法还包括:将导轨分别运行至每个标定点位,在每个标定点位,控制机器人的末端到达测量工具尖点的位置,记录每个标定点位所对应的,机器人在机器人基坐标系下的机器人标定位置坐标,以及导轨在导轨坐标系下的导轨标定位置坐标。
4、进一步的,导轨分别运行至每个标定点位,在每个标定点位,控制机器人的末端到达测量工具尖点的位置,记录每个标定点位所对应的,机器人在机器人基坐标系下的机器人标定位置坐标,以及导轨在导轨坐标系下的导轨标定位置坐标的步骤包括:将导轨运行至第一标定点位,控制机器人的末端到达测量工具尖点的位置,记录机器人在机器人基坐标系下的第一机器人标定位置坐标,以及导轨在导轨坐标系下的第一导轨标定位置坐标;将导轨运行至第二标定点位,控制机器人的末端到达测量工具尖点的位置,记录机器人在机器人基坐标系下的第二机器人标定位置坐标,以及导轨在导轨坐标系下的第二导轨标定位置坐标;将导轨运行至第三标定点位,控制机器人的末端到达测量工具尖点的位置,记录机器人在机器人基坐标系下的第三机器人标定位置坐标,以及导轨在导轨坐标系下的第三导轨标定位置坐标。
5、进一步的,获取在多个示教点位之间插入的多个插入点位,以及在世界坐标系下,机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标的步骤包括:获取多个示教点位,以及每个示教点位的信息,其中,每个示教点位的信息包括:在世界坐标系下,导轨在该示教点位对应的导轨示教位置坐标,机器人的工具中心点在该示教点位对应的工具中心点示教位置坐标;按预设方式,在多个示教点位之间插入多个插入点位;根据每个示教点位的信息,计算在世界坐标系下,机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标。
6、进一步的,多个示教点位包括:第一示教点位和第二示教点位。
7、进一步的,按预设方式,在多个示教点位之间插入多个插入点位的步骤包括:获取插补周期;按照插补周期,在多个示教点位之间插入多个插入点位。
8、进一步的,根据工具中心点位置坐标,对机器人与导轨进行协同规划的步骤包括:根据工具中心点位置坐标,确定机器人的关节位置数据;将关节位置数据转换为伺服数据,将伺服数据发送至伺服电机,以使伺服电机按照伺服数据转动。
9、本发明提供的一种机器人与导轨协同的装置,机器人设置在导轨上,导轨外部的预设位置设置一测量工具尖点;装置包括:第一获取模块,用于获取多个标定点位,根据每个标定点位对应的机器人标定位置坐标和导轨标定位置坐标,确定导轨坐标系和机器人基坐标系的转换矩阵,将导轨坐标系确定为世界坐标系,将导轨作为机器人的零轴;第二获取模块,用于获取在多个示教点位之间插入的多个插入点位,以及在世界坐标系下,机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标;确定模块,用于针对每个插入点位,根据转换矩阵和机器人的工具中心点在该插入点位对应的工具中心点插入位置坐标,确定在机器人基坐标系下,机器人的工具中心点在该插入点对应的工具中心点位置坐标;协同模块,用于根据工具中心点位置坐标,对机器人与导轨进行协同规划。
10、本发明提供的一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现上述任一项方法。
11、本发明提供的一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现上述任一项的方法。
12、本发明提供的机器人与导轨协同的方法、装置及电子设备,获取多个标定点位,根据每个标定点位对应的机器人标定位置坐标和导轨标定位置坐标,确定导轨坐标系和机器人基坐标系的转换矩阵,将导轨坐标系确定为世界坐标系,将导轨作为机器人的零轴,获取在多个示教点位之间插入的多个插入点位,以及在世界坐标系下,机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标。针对每个插入点位,根据转换矩阵和机器人的工具中心点在该插入点位对应的工具中心点插入位置坐标,确定在机器人基坐标系下,机器人的工具中心点在该插入点对应的工具中心点位置坐标。根据工具中心点位置坐标,对机器人与导轨进行协同规划。该方式在确定导轨坐标系和机器人基坐标系的转换矩阵后,将导轨坐标系确定为世界坐标系,并将导轨作为机器人的零轴,且根据该转换矩阵,将机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标,从世界坐标系转换至机器人基坐标下,进而实现对机器人与导轨的协同规划。
技术特征:
1.一种机器人与导轨协同的方法,其特征在于,所述机器人设置在所述导轨上,所述导轨外部的预设位置设置一测量工具尖点;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取多个标定定位的步骤之后,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述导轨分别运行至每个标定点位,在每个标定点位,控制所述机器人的末端到达所述测量工具尖点的位置,记录每个标定点位所对应的,所述机器人在机器人基坐标系下的机器人标定位置坐标,以及所述导轨在导轨坐标系下的导轨标定位置坐标的步骤包括:
4.根据权利要求1所述的方法,其特征在于,获取在多个示教点位之间插入的多个插入点位,以及在世界坐标系下,所述机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标的步骤包括:
5.根据权利要求4所述的方法,其特征在于,多个示教点位包括:第一示教点位和第二示教点位。
6.根据权利要求4所述的方法,其特征在于,按预设方式,在所述多个示教点位之间插入多个插入点位的步骤包括:
7.根据权利要求1所述的方法,其特征在于,根据所述工具中心点位置坐标,对所述机器人与所述导轨进行协同规划的步骤包括:
8.一种机器人与导轨协同的装置,其特征在于,所述机器人设置在所述导轨上,所述导轨外部的预设位置设置一测量工具尖点;所述装置包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至7任一项所述方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现权利要求1至7任一项所述的方法。
技术总结
本发明提供了一种机器人与导轨协同的方法、装置及电子设备,按各标定点位的机器人标定位置坐标和导轨标定位置坐标,确定导轨坐标系和机器人基坐标系的转换矩阵,将导轨坐标系作为世界坐标系,导轨作为机器人的零轴,获取世界坐标系下,工具中心点在各插入点位的工具中心点插入位置坐标,结合转换矩阵得到机器人基坐标系下的工具中心点位置坐标,以对机器人与导轨协同。该方式在确定导轨坐标系和机器人基坐标系的转换矩阵后,将导轨坐标系确定为世界坐标系,并将导轨作为机器人的零轴,且根据该转换矩阵,将机器人的工具中心点在每个插入点位对应的工具中心点插入位置坐标,从世界坐标系转换至机器人基坐标下,进而实现对机器人与导轨的协同规划。
技术研发人员:黄贵良,邓璨宇
受保护的技术使用者:成都卡诺普机器人技术股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!