一种工业机器人调试用工具箱的制作方法
1.本实用新型涉及工具箱技术领域,具体而言,涉及一种工业机器人调试用工具箱。
背景技术:
2.工具箱,它是一种容器,是存储工具和各种家庭杂物的容器,可用于生产,家庭,维修,钓鱼等各种用途,使用广泛。它分为移动型和固定型。
3.目前,现有的工业机器人调试用工具箱,在使用时工具箱不方便进行收纳和展开,同时不方便对使用工具进行分类存放使用不够方便。
技术实现要素:
4.为了弥补以上不足,本实用新型提供了一种工业机器人调试用工具箱,旨在改善工业机器人调试用工具箱,工具箱不方便进行收纳和展开,同时不方便对使用工具进行分类存放使用不够方便的问题。
5.本实用新型是这样实现的:
6.本实用新型提供一种工业机器人调试用工具箱,包括箱体结构和存放结构。
7.所述箱体结构包括箱体和箱盖,所述箱盖铰接在所述箱体的顶面一侧,所述箱体的表面安装固定有牵引组件,所述存放结构包括第二横块、第一存放盒、第二螺纹柱和第二存放盒,所述第二横块固定在所述箱体的底部,所述第二横块的内部开设有空腔,所述第二横块的内部转动连接转动杆,所述转动杆的一端延伸至所述空腔的内部,所述第一存放盒滑动连接在所述箱体的内部,所述第一存放盒的内部固定有固定柱,所述第二螺纹柱螺纹连接在所述固定柱的内部,所述第二螺纹柱的底部固定有连接杆,所述连接杆转动贯穿所述第一存放盒、所述箱体和所述第二横块延伸至所述空腔的内部,所述连接杆与所述转动杆之间通过传动件传动连接,所述第一存放盒的内部两侧滑动连接有第二存放盒。
8.在本实用新型的一种实施例中,所述箱体的底部安装有移动轮,所述移动轮位于所述第二横块的两侧。
9.在本实用新型的一种实施例中,所述箱盖的另一侧通过锁扣与所述箱体固定,所述箱盖的顶面安装有把手。
10.在本实用新型的一种实施例中,所述牵引组件包括滑轨和牵引件,所述滑轨固定在所述箱体的两侧,所述牵引件安装在所述滑轨的上。
11.在本实用新型的一种实施例中,所述滑轨包括两个第一横块,两个所述第一横块固定在所述箱体的两侧,所述第一横块的内部开设有滑动腔,所述滑动腔上开设有滑槽。
12.在本实用新型的一种实施例中,所述牵引件包括牵引杆和连接柱,所述连接柱固定在所述牵引杆内表面两侧,所述连接柱的端部安装有导轨滚轮,所述导轨滚轮滚动连接在所述滑动腔的内部,所述连接柱滑动贯穿所述滑槽,所述牵引杆的一侧固定有锁紧件。
13.在本实用新型的一种实施例中,所述锁紧件包括固定块和第一螺纹柱,所述固定块固定在所述牵引杆的一侧,所述第一螺纹柱螺纹贯穿于所述固定块的内部,所述第一螺
纹柱的一端贯穿所述牵引杆,所述第一螺纹柱的另一端固定有旋转块。
14.在本实用新型的一种实施例中,所述第一存放盒的内部两侧开设有限位槽,所述第二存放盒的两侧固定有与所述限位槽相匹配的滑块,所述滑块滑动连接在所述限位槽的内部。
15.在本实用新型的一种实施例中,所述传动件包括第一传动轮和第二传动轮,所述第一传动轮键连接在所述连接杆的端部,所述第二传动轮键连接在所述转动杆的一端,所述第一传动轮与所述第二传动轮啮合。
16.本实用新型的有益效果是:本实用新型通过上述设计得到的一种工业机器人调试用工具箱,使用时,打开箱盖,通过旋转转动杆在传动件的作用下带动连接杆进行转动,这样第二螺纹柱跟随连接杆进行转动,从而使第一存放盒向上伸出,当伸出一定高度以后,滑动第二存放盒,使第二存放盒从而第一存放盒的内部向两侧移动进行展开,使用完以后将第二存放盒收纳到第一存放盒的内部,并通过旋转转动杆将第一存放盒收纳到箱体的内部,这样可以在使用时可以方便进行收纳和展开,有利于对使用工具进行分类存放使用更加方便。
附图说明
17.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
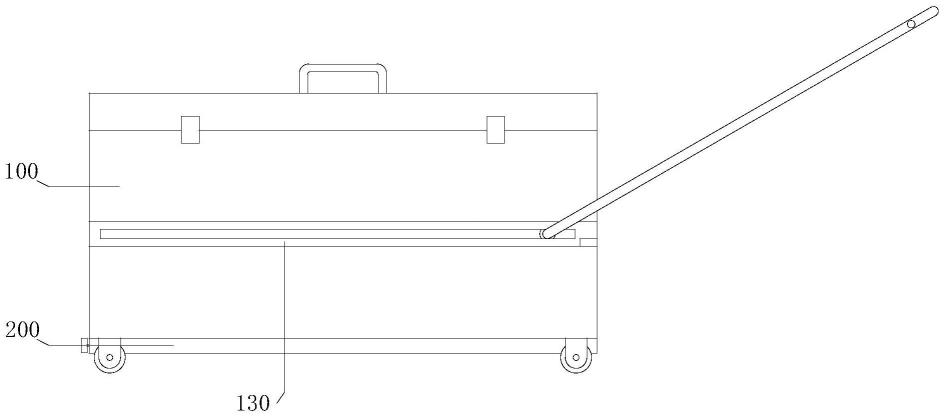
18.图1是本实用新型实施方式提供的工业机器人调试用工具箱第一视角结构示意图;
19.图2为本实用新型实施方式提供的工业机器人调试用工具箱第一视角剖面结构示意图;
20.图3为本实用新型实施方式提供的工业机器人调试用工具箱第二视角展开结构示意图;
21.图4为本实用新型实施方式提供的工业机器人调试用工具箱第二视角剖面结构示意图;
22.图5为本实用新型实施方式提供的工业机器人调试用工具箱滑轨剖面结构示意图;
23.图6为本实用新型实施方式提供的工业机器人调试用工具箱牵引件剖面结构示意图;
24.图7为本实用新型图2中a处放大图。
25.图中:100-箱体结构;110-箱体;111-移动轮;120-箱盖;130-牵引组件;131-滑轨;1311-第一横块;1312-滑动腔;1313-滑槽;132-牵引件;1321-牵引杆;1322-连接柱;1323-导轨滚轮;140-锁紧件;141-固定块;142-第一螺纹柱;200-存放结构;210-第二横块;211-空腔;220-转动杆;230-第一存放盒;231-固定柱;232-限位槽;240-第二螺纹柱;241-连接杆;250-传动件;251-第一传动轮;252-第二传动轮;260-第二存放盒;261-滑块。
具体实施方式
26.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
27.实施例
28.请参阅图1-7,本实用新型提供一种技术方案:一种工业机器人调试用工具箱,包括箱体结构100和存放结构200。
29.存放结构200安装固定在箱体结构100的内部,这样可以方便对使用工具进行存放。
30.请参阅图1-图4,箱体结构100包括箱体110和箱盖120,箱盖120铰接在箱体110的顶面一侧,箱体110的表面安装固定有牵引组件130。
31.箱体110的底部安装有移动轮111,移动轮111位于第二横块210的两侧,这里移动轮111的设置可以方便工具箱进行移动;箱盖120的另一侧通过锁扣与箱体110固定,箱盖120的顶面安装有把手,这里锁扣和把手的设置可以方便对箱盖120进行关闭或打开,把手的设置可以方便手提。
32.牵引组件130包括滑轨131和牵引件132,滑轨131固定在箱体110的两侧,牵引件132安装在滑轨131的上;滑轨131包括两个第一横块1311,两个第一横块1311固定在箱体110的两侧,第一横块1311的内部开设有滑动腔1312,这里在第一横块1311的表面固定有挡块,用于对牵引杆1321进行阻挡放置,滑动腔1312上开设有滑槽1313;牵引件132包括牵引杆1321和连接柱1322,连接柱1322固定在牵引杆1321内表面两侧,连接柱1322的端部安装有导轨滚轮1323,导轨滚轮1323滚动连接在滑动腔1312的内部,连接柱1322滑动贯穿滑槽1313,牵引杆1321的一侧固定有锁紧件140,这里牵引杆1321可以方便从滑轨131的中拉出然后倾斜,这样在配合移动轮111可以方便对工具箱进行移动,这样在携带过程中可以更加方便。
33.锁紧件140包括固定块141和第一螺纹柱142,固定块141固定在牵引杆1321的一侧,第一螺纹柱142螺纹贯穿于固定块141的内部,第一螺纹柱142的一端贯穿牵引杆1321,第一螺纹柱142的另一端固定有旋转块,这里通过转动第一螺纹柱142,使第一螺纹柱142的端部与第一横块1311的表面发生挤压,可以方便在牵引杆1321收纳以后对其进行固定。
34.请参阅图1-图4和图7,存放结构200包括第二横块210、第一存放盒230、第二螺纹柱240和第二存放盒260,第二横块210固定在箱体110的底部,第二横块210的内部开设有空腔211,第二横块210的内部转动连接转动杆220,转动杆220的一端延伸至空腔211的内部,这里转动杆220的表面过盈连接有轴承,轴承镶嵌固定在第二横块210的内部,用于对转动杆220进行固定同时方便转动杆220进行转动,第一存放盒230滑动连接在箱体110的内部,第一存放盒230的内部固定有固定柱231,第二螺纹柱240螺纹连接在固定柱231的内部,这里固定柱231的内部开设有与第二螺纹柱240相匹配的螺纹孔,可以使第一存放盒230进行上下移动;第二螺纹柱240的底部固定有连接杆241,连接杆241转动贯穿第一存放盒230、箱体110和第二横块210延伸至空腔211的内部,这里连接杆241的表面过盈连接有轴承,轴承
镶嵌固定在箱体110的内部,用于方便连接杆241进行转动和固定,连接杆241与转动杆220之间通过传动件250传动连接,第一存放盒230的内部两侧滑动连接有第二存放盒260,这里在第一存放盒230的两侧开设有与第二存放盒260相匹配的豁口,用于方便第二存放盒260滑动。
35.第一存放盒230的内部两侧开设有限位槽232,第二存放盒260的两侧固定有与限位槽232相匹配的滑块261,滑块261滑动连接在限位槽232的内部,这里通过限位槽232和滑块261的设置,可以对第二存放盒260进行限位,有利于第二存放盒260在第一存放盒230的内部进行来回滑动,从而方便进行收纳。
36.传动件250包括第一传动轮251和第二传动轮252,第一传动轮251键连接在连接杆241的端部,第二传动轮252键连接在转动杆220的一端,第一传动轮251与第二传动轮252啮合,这里第一传动轮251和第二传动轮252均为锥形齿轮,通过这样的设置可以方便通过转动杆220带动连接杆241进行转动,这里转动杆220的另一端连接有旋转块用于方便对转动杆220进行旋转。
37.具体的,该工业机器人调试用工具箱的工作原理:使用时,打开箱盖120,通过旋转转动杆220在传动件250的作用下带动连接杆241进行转动,这样第二螺纹柱240跟随连接杆241进行转动,从而使第一存放盒230向上伸出,当伸出一定高度以后,滑动第二存放盒260,使第二存放盒260从而第一存放盒230的内部向两侧移动进行展开,使用完以后将第二存放盒260收纳到第一存放盒230的内部,并通过旋转转动杆220将第一存放盒230收纳到箱体110的内部,这样可以在使用时可以方便进行收纳和展开,有利于对使用工具进行分类存放使用更加方便,这时关闭箱盖120并转动第一螺纹柱142,使第一螺纹柱142的端部远离第一横块1311,然后将牵引杆1321拉出滑轨131,这样利用移动轮111可以方便对工具箱进行牵引,使工具箱在移动时可以更加方便。
38.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1