一种大负载潜伏式机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种大负载潜伏式机器人。
背景技术:
2.随着智能仓储的发展,具有自动导航的仓库运输机器人的应用越来越广泛。现有的仓储运输机器人,一般具有顶升功能,其能够将货物顶升到预定高度。现有的潜伏机器人仅适用举升货架,采取顶升结构和顶升板抬起货物,再用回转支承带动顶升板实现转360度转动。但是现有的潜伏机器人采用的顶升结构复杂且占用面积较大,影响潜伏机器人的操作灵活度。
技术实现要素:
3.为解决背景技术中存在的技术问题,本实用新型提出一种大负载潜伏式机器人。
4.本实用新型提出的一种大负载潜伏式机器人,包括:机身、升降机构和升降台;
5.机身包括底座和围板,底座底部具有行走轮组件,围板位于底座上方且在底座上方形成开口,升降台位于所述开口上方;
6.升降机构安装在所述开口内,升降机构包括支撑台、步进电机和传动丝杆,底座上设有竖直延伸的导套,支撑台位于导套上方且底部设有与导套配合的导柱,传动丝杆竖直布置在支撑台下方且可转动安装在底座上,传动丝杆上端具有定位销头,支撑台底部具有与定位销头配合的定位销孔,步进电机与传动丝杆连接用于驱动传动丝杆转动以使得支撑台从所述开口伸出带动升降台升降。
7.优选地,支撑台底部设有多个导柱,多个导柱围绕传动丝杆分布,底座上设有分别与多个导柱配合的多个导套。
8.优选地,行走轮组件包括两个主动差速轮和两组辅助轮,两个主动差速轮位于机身底部且对称分布在机身行走方向两侧,两组辅助轮均匀分布在两个主动差速轮周围。
9.优选地,每组辅助轮包括前辅助万向轮和后辅助万向轮,每组辅助轮的前辅助万向轮和后辅助万向轮分别位于一个主动差速轮的前后两侧。
10.优选地,行走轮组件还包括悬架,悬架上设有竖直延伸的导杆,底座上设有支架,支架上设有导孔,悬架的导杆与导孔配合且悬架通过导杆吊装在支架上,支架和悬架支架设有弹性缓冲件,主动差速轮可转动安装在悬架上。
11.优选地,弹性缓冲件采用弹簧,弹簧套设在导杆外部。
12.优选地,悬架上设有凸台和分别位于凸台两侧的两个导杆,凸台上设有竖直设置的定位杆,支架上设有与定位杆配合的定位孔。
13.优选地,升降台与支撑台固定连接。
14.本实用新型中,所提出的大负载潜伏式机器人,机身底部具有行走轮组件,升降台位于所述开口上方;升降机构安装在机身内,升降机构通过步进电机驱动传动丝杆转动以使得支撑台从所述开口伸出带动升降台升降。通过上述优化设计的大负载潜伏式机器人,
通过对升降台的升降机构进行改进,提高机器人负载能力,保证提升时的平稳性,同时传动丝杆能够精确控制升高位置,并且为升降台提供可靠支撑。
附图说明
15.图1为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的结构示意图。
16.图2为本实用新型提出的一种大负载潜伏式机器人的一种实施方式中升降机构在底座上安装的结构示意图。
17.图3为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的爆炸结构示意图。
18.图4为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的悬架安装结构示意图。
具体实施方式
19.如图1至4所示,图1为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的结构示意图,图2为本实用新型提出的一种大负载潜伏式机器人的一种实施方式中升降机构在底座上安装的结构示意图,图3为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的爆炸结构示意图,图4为本实用新型提出的一种大负载潜伏式机器人的一种实施方式的悬架安装结构示意图。
20.参照图1至4,本实用新型提出的一种大负载潜伏式机器人,包括:机身1、升降机构和升降台2;
21.机身1包括底座11和围板12,底座11底部具有行走轮组件,围板12位于底座11上方且在底座11上方形成开口,升降台2位于所述开口上方;
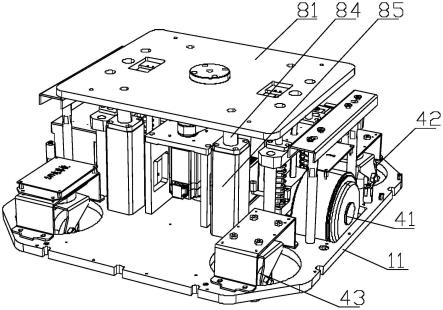
22.升降机构安装在所述开口内,升降机构包括支撑台81、步进电机82和传动丝杆83,底座11上设有竖直延伸的导套85,支撑台81位于导套85上方且底部设有与导套85配合的导柱84,传动丝杆83竖直布置在支撑台81下方且可转动安装在底座11上,传动丝杆83上端具有定位销头831,支撑台81底部具有与定位销头831配合的定位销孔,步进电机82与传动丝杆83连接用于驱动传动丝杆83转动以使得支撑台81从所述开口伸出带动升降台2升降。
23.在实际设计中,升降台2与支撑台81固定连接。
24.本实施例的大负载潜伏式机器人的具体工作过程中,升降台上负载有搬运货物,机身通过行走轮组件搬运货物移动。当货物需要上升时,步进电机驱动传动丝杆转动,由于传动丝杆通过定位销头与支撑台底部的定位销孔配合,同时支撑台通过导柱和导套与底座配合,因此,传动丝杆在步进电机的作用下逐步上升,从而通过支撑台推动升降台上升,实现货物的上升。
25.在本实施例中,所提出的大负载潜伏式机器人,机身底部具有行走轮组件,升降台位于所述开口上方;升降机构安装在机身内,升降机构通过步进电机驱动传动丝杆转动以使得支撑台从所述开口伸出带动升降台升降。通过上述优化设计的大负载潜伏式机器人,通过对升降台的升降机构进行改进,提高机器人负载能力,保证提升时的平稳性,同时传动丝杆能够精确控制升高位置,并且为升降台提供可靠支撑。
26.在支撑台的具体设计方式中,支撑台81底部设有多个导柱84,多个导柱84围绕传动丝杆83分布,底座11上设有分别与多个导柱84配合的多个导套85。
27.在行走轮组件的具体实施方式中,行走轮组件包括两个主动差速轮41和两组辅助轮,两个主动差速轮41位于机身1底部且对称分布在机身1行走方向两侧,两组辅助轮均匀分布在两个主动差速轮41周围。通过驱动两个主动差速轮转动,带动机身行走,当机身需要转向时,调整两个主动差速轮之间的速度差,即可完成灵活转向。辅助轮在主动差速轮周围,保证整个机身平稳移动。
28.进一步地,每组辅助轮包括前辅助万向轮42和后辅助万向轮43,每组辅助轮的前辅助万向轮42和后辅助万向轮43分别位于一个主动差速轮41的前后两侧。
29.在另一具体实施方式中,行走轮组件还包括悬架9,悬架9上设有竖直延伸的导杆91,底座11上设有支架111,支架111上设有导孔,悬架9的导杆91与导孔配合且悬架9通过导杆91吊装在支架111上,支架111和悬架9支架111设有弹性缓冲件,主动差速轮41可转动安装在悬架9上。主动差速轮通过悬架装在底座上,当行走时发生颠簸时,通过悬架弹性吊装,为主动差速轮提供缓冲。
30.进一步地,弹性缓冲件采用弹簧92,弹簧92套设在导杆91外部。
31.在悬架的具体设计中,悬架9上设有凸台90和分别位于凸台90两侧的两个导杆91,凸台90上设有竖直设置的定位杆93,支架111上设有与定位杆93配合的定位孔。通过定位杆和定位孔配合,将悬架的浮动方向限制在较小的范围内,避免主动轮浮动空间过大,影响负载稳定性。
32.在实际工作中,潜伏式机器人避障可使用雷达、视觉、超声波中的一种或多种。当检测到有障碍物后,机器人即停止运行,原地等待,直到障碍物移走后才继续行走。在相应设计时,机身1侧壁具有安装凹槽10,所述安装凹槽10沿机身1行走方向两侧方向延伸,雷达3安装在所述安装凹槽10内,雷达3位于升降台2下方,所述安装凹槽10内侧壁形成从雷达3向两端后方延伸的两个传导面101。由于雷达隐藏在机身侧壁凹槽内,使得升降台位于整个机身正上方,保证机身负载货物的能力。在行走的过程中,雷达在行走方向前端接收雷达信号,由于传导面向斜后方延伸,增大了雷达的辐射角度。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1