一种热冲压机床上下料机器人机械臂的制作方法
本发明涉及机器人组件,具体涉及一种热冲压机床上下料机器人机械臂。
背景技术:
1、自从世界第一台工业机器人出现至今袁机器人技术经历了一个长期缓慢的发展过程遥20世纪90年代以来随着计算机技术、微电子技术、网络技术快速的发展,机器人技术也飞速发展。虽然制造价格不断降低,但其质量与性能却在迅速提高,其应用领域也不断地扩大,进入了人们生产生活的许多方面,对人类社会的进步以及生产力的提高具有重要作用。
2、国内外热冲压生产上下料技术的发展经历了以下几个阶段。第一阶段为20世纪50年代以前,主要是人工上下料完成大型覆盖件的冲压生产效率较低、人身安全环境得不到保障,冲压制件质量较差。第二阶段为20世纪60年代左右,采用一台双动拉伸机和数台单独拉伸机组成冲压连线。考虑降低成本冲压生产需要大批量生产模式,且冲压生产过程中的存在的恶劣工作环境、噪声、工作单调乏味及人身安全等方面的原因,开始采用各种机械化装置来代替人工来完成上、下料和冲压件在压机之间的传递及反转等工作。第三阶段是自20世纪70年代以来,冲压生产技术面向高速化、自动化、柔性化、精密化的方向发展。机器人冲压自动线可以方便地通过编程的方式改变机器人运动的轨迹和作业内容,具有较高的柔性、特别适合品种较多、小批量的现代生产方式。
3、根据中国专利公开了:“一种上下料机器人及其上下料机械臂”,专利号为:cn208196820u,虽然对比的专利在需要装夹、更换或拆卸大质量、大体积的工件、刀具时,工人可操作本实用新型所提供的上下料机械臂,利用驱动缸的动力驱动夹爪进行张合,能够方便、稳定地夹持工件,有利于后续的运输或安装,节省人力,降低人工成本。
4、现有的热冲压机床上下料机器人机械臂在使用的过程中还存在以下问题:
5、通过人工实现上下料,劳动强度大,生产环境恶劣且有高温烫伤的人身伤害安全风险,且对比专利中不具备伸缩功能,取料和送料的工作范围小,且夹持的过程中容易对物体造成损坏,不利于上下料。为此我们对现有技术做出改进并提出一种热冲压机床上下料机器人机械臂。
技术实现思路
1、本发明提供一种热冲压机床上下料机器人机械臂,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:一种热冲压机床上下料机器人机械臂,包括:
3、安装板;
4、安装架,固定连接在安装板的顶部;
5、升降结构,设置在安装板的上方;
6、所述升降结构包括:
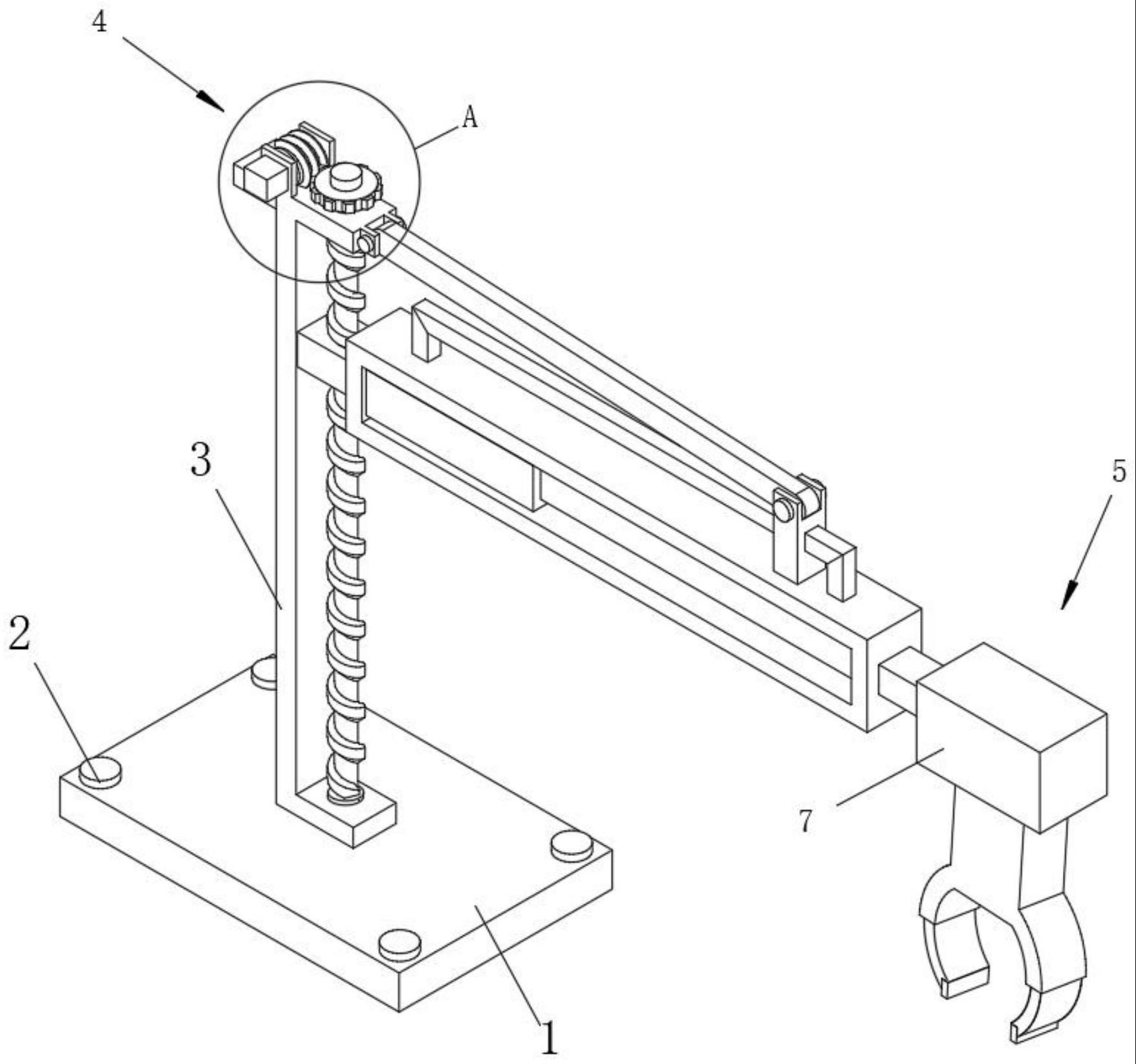
7、一号延伸板,固定连接在安装架的顶部;
8、二号延伸板,固定连接在安装架的顶部;
9、蜗杆,一端活动贯穿二号延伸板的外侧且通过轴承与一号延伸板的内侧转动连接;
10、电机a,固定安装在二号延伸板的外侧,且蜗杆的另一端通过联轴器固定连接在电机a的输出端;
11、螺纹杆,底端活动贯穿安装架的顶部且通过轴承与安装架的底部内壁转动连接;
12、蜗轮,固定套设在螺纹杆的表面,所述蜗杆与蜗轮啮合;
13、滑块a,螺纹套设在螺纹杆的表面;
14、条形块,固定连接在滑块a的另一侧。
15、本发明技术方案的进一步改进在于:还包括:
16、夹持结构,设置在升降结构的一侧;
17、所述夹持结构包括:
18、壳身,固定连接在收卷箱的底部;
19、弧形外壳,均与壳身的底部连通设置;
20、两个弧形夹块,分别接触在两个所述弧形外壳的内壁;
21、两根绳索,两端分别与两个所述弧形夹块固定连接,两根绳索的另一端相互系接;
22、钢丝绳,一端分别与两根绳索的另一端固定连接,所述钢丝绳的另一端依次贯穿壳身的内壁、收卷箱的外壁;
23、弹簧,两端分别与两个所述弧形夹块相邻的一侧固定连接。
24、本发明技术方案的进一步改进在于:还包括:
25、承重结构,设置在升降结构的上方;
26、所述承重结构包括:
27、一号铰接块,固定连接在安装架的一侧;
28、限位块,固定连接在条形块的顶部;
29、滑块b,活动套设在限位块的表面;
30、二号铰接块,固定连接在滑块b的顶部;
31、连杆,两端分别通过活动销铰接在一号铰接块、二号铰接块的内侧。
32、本发明技术方案的进一步改进在于:所述安装板的顶部四角处分别开设有螺纹孔,且每个所述螺纹孔内均螺纹连接有螺栓,采用螺纹连接的安装方式方便对安装板进行安装与拆卸,从而方便进行使用。
33、本发明技术方案的进一步改进在于:所述升降结构还包括:
34、条形孔,开设在条形块的正面,所述条形孔的孔壁固定安装有液压缸,所述液压缸的伸缩端活动贯穿条形孔的孔壁且与收卷箱的一侧固定连接,通过设置的液压缸从而方便调节距离来实现夹持的作用。
35、本发明技术方案的进一步改进在于:所述收卷箱的内壁安装有收卷辊,所述钢丝绳一端与收卷辊固定连接,且钢丝绳的表面缠绕设置在收卷辊上,通过设置的收卷辊是由驱动组件实现运作,利用收卷辊对钢丝绳实现缠绕收卷,从而使得两个弧形夹块之间腾出足够的空间来实现夹持效果,当收卷辊放卷时,通过弹簧的弹性势能将两个弧形夹块实现卡紧,从而将需要夹持的物体牢牢固定住,避免发生脱落的风险。
36、本发明技术方案的进一步改进在于:所述限位块呈长条状u字形,且滑块b与限位块的表面滑动连接,所述滑块b的底部与条形块的顶部接触,通过设置的限位块对滑块b起到限位的作用,使得滑块b在限位块和安装架的顶部滑动时更加稳定。
37、本发明技术方案的进一步改进在于:所述夹持结构还包括:
38、两个下螺钉,均设置在壳身的内壁,两根所述绳索的表面分别与两个所述下螺钉的外壁接触,通过设置的两个下螺钉分别对两根绳索起到限位的作用,使得绳索的表面不易受到磨损。
39、本发明技术方案的进一步改进在于:所述滑块a的一侧与安装架的内侧接触且滑动连接,利用安装架的内侧对滑块a起到限位的作用,使得滑块a在安装架的内侧滑动时更加稳定。
40、本发明技术方案的进一步改进在于:所述螺纹杆活动贯穿安装架的内壁通过轴承转动连接,使得螺纹杆在转动的过程中稳定性更好。
41、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
42、1、本发明提供一种热冲压机床上下料机器人机械臂,通过设置的升降结构,只需启动电机a,并通过蜗杆与蜗轮的啮合,利用螺纹杆带动滑块a上下移动,使得夹持结构跟随滑块a而上下运动,从而调节高度进行夹持,方便对夹持下的物体进行上下输送,起到方便上下料的作用。
43、2、本发明提供一种热冲压机床上下料机器人机械臂,通过设置的夹持结构,由于收卷辊是由驱动组件实现运作,利用收卷辊对钢丝绳实现缠绕收卷,从而使得两个弧形夹块之间腾出足够的空间来实现夹持效果,当收卷辊放卷时,通过弹簧的弹性势能将两个弧形夹块实现卡紧,从而将需要夹持的物体牢牢固定住,避免发生脱落的风险。
44、3、本发明提供一种热冲压机床上下料机器人机械臂,通过设置的承重结构,在夹持结构跟随滑块而上下运动的同时,通过设置的限位块对滑块b起到限位的作用,使得滑块b在限位块和安装架的顶部滑动时更加稳定,此时连杆的两端分别绕着两个活动销转动,从而起到承重的作用,在夹持结构升降的过程中稳定性更好,最后通过设置的液压缸从而方便调节距离来实现夹持的作用。
- 还没有人留言评论。精彩留言会获得点赞!