连接机构及机器人的制作方法
本申请涉及机器人的,特别涉及一种连接机构及机器人。
背景技术:
1、在仿生机器人领域,连接机构可以连接于机器人的头部机构和躯干部,以实现机器人头部机构和躯干部的连接。连接机构的运动带动机器人头部机构的运动,以实现机器人头部机构与机器人身体机构的相对运动。
2、目前,为了实现机器人头部机构在多个方向上运动,连接机构可以包括多个运动驱动装置,从而导致连接机构的体积较大,体积较大的连接机构提高了对机器人可活动的空间的限制。因此,实现连接机构的体积减小仍是机器人技术领域急需解决的重要课题。
技术实现思路
1、鉴于以上内容,有必要提供一种连接机构及机器人,通过将部分驱动件安装在架体中的收容空间内,减小连接机构的占用体积,具有可以降低对机器人可活动空间的限制的效果。
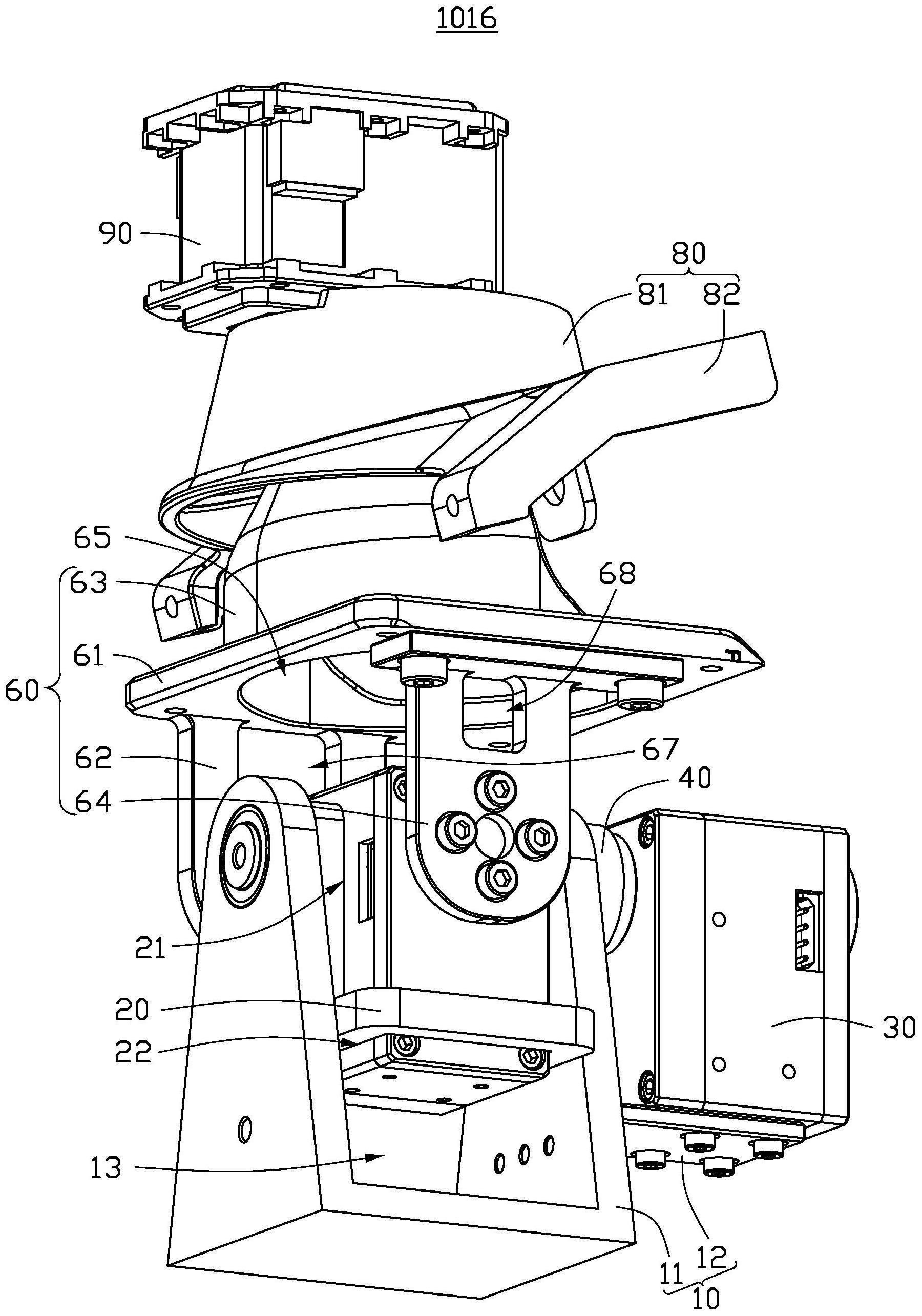
2、第一方面,本申请实施例提供一种连接机构,应用于机器人,所述机器人包括头部机构和身体机构,所述连接机构包括:承载架,包括主架体和附架体,所述主架体内开设有第一间隙,所述附架体安装在所述主架体一侧,所述主架体用于连接所述身体机构;第一活动架,收容于所述第一间隙并与所述主架体转动连接,所述第一活动架内开设有第二间隙;第一驱动件,安装于所述附架体上且位于所述主架体侧部,所述第一驱动件为具有驱动轴的转动驱动件,所述第一驱动件的驱动轴与所述主架体转动连接,且与所述第一活动架固定连接,所述第一驱动件用于驱动第一活动架转动;第二驱动件,收容于所述第二间隙,所述第二驱动件为具有驱动轴的转动驱动件,所述第二驱动件的驱动轴用于连接所述头部机构,所述第二驱动件用于驱动所述头部机构转动。
3、可选地,所述连接机构包括:所述第一驱动件的驱动轴固定连接有第一联轴器,所述第一联轴器穿设所述主架体并进入所述第一间隙,所述第一联轴器与所述主架体转动连接,所述第一联轴器进入所述第一间隙的一端与所述第一活动架固定连接。
4、可选地,所述连接机构包括:第二活动架,包括第一连接部、第一基座和第一凸出部,所述第一连接部凸设于所述第一基座的一侧,所述第一凸出部凸设于所述第一基座的另一侧,所述第一连接部转动连接于所述第一活动架,并与所述第二驱动件的驱动轴固定连接;第三驱动件,所述第三驱动件为具有驱动轴的转动驱动件;第三活动架,与所述第三驱动件固定连接,且可相对所述第二活动架转动,所述第三活动架用于与所述头部机构连接,所述第三驱动件的驱动轴穿设所述第三活动架,并与所述第二活动架固定连接。
5、可选地,所述第一活动架的转动中心轴,所述第二活动架的转动中心轴,以及所述第三活动架的转动中心轴的相交于一点。
6、可选地,所述第二活动架还包括第二连接部,所述第二连接部连接于所述第一基座背离所述第一凸出部的一侧,所述第二连接部与所述第一连接部间隔设置,且所述第二连接部可相对所述第二驱动件转动。
7、可选地,所述第三活动架包括第二基座和第二凸出部,所述第二基座用于与所述头部机构固定,所述第二凸出部与所述第三驱动件固定连接,所述第二凸出部内中空设置,所述第二凸出部可相对所述第一凸出部转动。
8、可选地,所述第一基座上开设有第一开口,所述第一凸出部上开设有第二开口,所述第二开口和所述第一开口相通,所述第二开口和所述第一开口用于供所述机器人的线束通过。
9、可选地,所述第二驱动件的驱动端连接有第二联轴器,所述第二联轴器穿设所述第一活动架,所述第二联轴器与所述第一活动架转动连接,所述第二联轴器与所述第一连接部固定连接。
10、可选地,所述第一活动架开设有定位孔,所述定位孔与所述第二间隙连通,所述第二驱动件至少部分通过所述定位孔。
11、第二方面,本申请实施例提供一种机器人,包括:身体机构;如上述任一项所述的连接机构,所述连接机构安装于所述身体机构;头部机构,与所述连接机构连接,所述头部机构用于响应于所述连接机构的驱动,与所述身体机构产生相对运动。
12、通过本申请提供的一种连接机构及机器人,可以通过将第一活动架收容于第一间隙,将第二驱动件收容于第二间隙,从而减少连接机构整体的占用空间,从而降低连接机构工作时,机器人可活动空间由于连接机构占用空间过大而受影响的情况,降低连接机构的占用空间对机器人活动空间的限制。
技术特征:
1.一种连接机构,应用于机器人,所述机器人包括头部机构和身体机构,其特征在于,所述连接机构包括:
2.如权利要求1所述的连接机构,其特征在于,所述连接机构包括:所述第一驱动件的驱动轴固定连接有第一联轴器,所述第一联轴器穿设所述主架体并进入所述第一间隙,所述第一联轴器与所述主架体转动连接,所述第一联轴器进入所述第一间隙的一端与所述第一活动架固定连接。
3.如权利要求1所述的连接机构,其特征在于,所述连接机构包括:
4.如权利要求3所述的连接机构,其特征在于,所述第一活动架的转动中心轴,所述第二活动架的转动中心轴,以及所述第三活动架的转动中心轴的相交于一点。
5.如权利要求3所述的连接机构,其特征在于,所述第二活动架还包括第二连接部,所述第二连接部连接于所述第一基座背离所述第一凸出部的一侧,所述第二连接部与所述第一连接部间隔设置,且所述第二连接部可相对所述第二驱动件转动。
6.如权利要求3所述的连接机构,其特征在于,所述第三活动架包括第二基座和第二凸出部,所述第二基座用于与所述头部机构固定,所述第二凸出部与所述第三驱动件固定连接,所述第二凸出部内中空设置,所述第二凸出部可相对所述第一凸出部转动。
7.如权利要求3所述的连接机构,其特征在于,所述第一基座上开设有第一开口,所述第一凸出部上开设有第二开口,所述第二开口和所述第一开口相通,所述第二开口和所述第一开口用于供所述机器人的线束通过。
8.如权利要求3所述的连接机构,其特征在于,所述第二驱动件的驱动端连接有第二联轴器,所述第二联轴器穿设所述第一活动架,所述第二联轴器与所述第一活动架转动连接,所述第二联轴器与所述第一连接部固定连接。
9.如权利要求1所述的连接机构,其特征在于,所述第一活动架开设有定位孔,所述定位孔与所述第二间隙连通,所述第二驱动件至少部分通过所述定位孔。
10.一种机器人,其特征在于,包括:
技术总结
本申请提供一种连接机构及机器人,机器人包括头部机构和身体机构,连接机构包括:承载架,包括主架体和附架体,主架体内开设有第一间隙,附架体安装在主架体一侧,主架体用于连接身体机构;第一活动架,收容于第一间隙并与主架体转动连接,第一活动架内开设有第二间隙;第一驱动件,安装于附架体上且位于主架体侧部,第一驱动件为具有驱动轴的转动驱动件,第一驱动件的驱动轴与主架体转动连接,且与第一活动架固定连接,第一驱动件用于驱动第一活动架转动;第二驱动件,收容于第二间隙,第二驱动件为具有驱动轴的转动驱动件,第二驱动件的驱动轴用于连接头部机构,第二驱动件用于驱动头部机构转动。
技术研发人员:何俊培,张腾涛,黄诗轩,高松,丁云鹏
受保护的技术使用者:深圳鹏行智能研究有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!