一种用于爆炸性环境的外壳隔爆机器人关节的制作方法
本发明涉及机器人,具体为一种用于爆炸性环境的外壳隔爆机器人关节。
背景技术:
1、随着人工智能及机器人技术的进步,越来越多的人工操作可以用机器人代替,协作机器人因其体积小巧,操作便捷且安全可靠,可满足人机协作等特点越来越被市场青睐;协作机器人由6个一体化关节及机械连杆组成,若是实现关节隔爆,便可很容易组装出用于爆炸性环境的协作机器人;目前市场上生产协作机器人的厂家众多,机器人型号也多种多样,但用于爆炸性环境的却没有。
技术实现思路
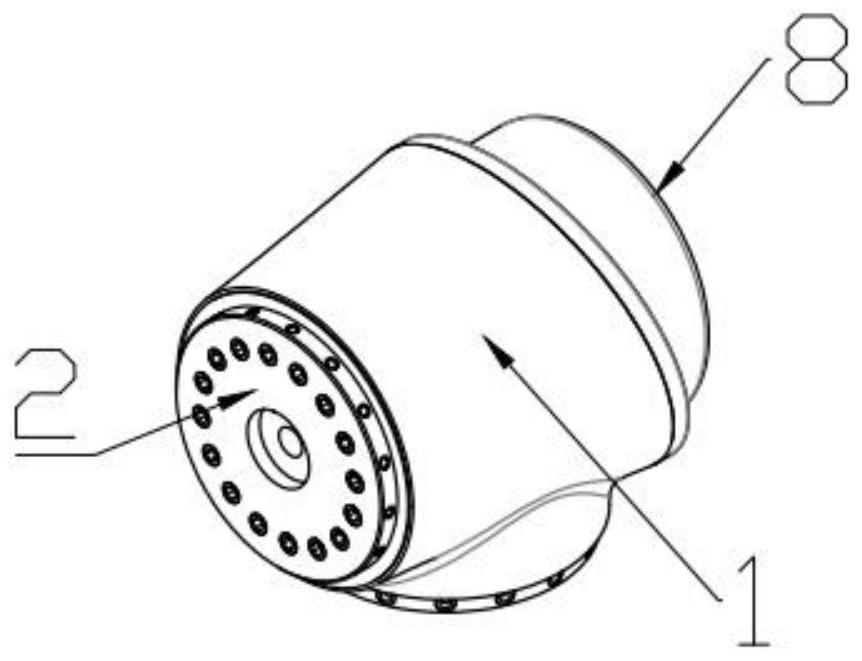
1、鉴于此,有必要针对上述问题,提供一种用于爆炸性环境的外壳隔爆机器人关节,其包括隔爆外壳、输出法兰、谐波减速机、无框力矩电机、制动齿、输入端编码器、输出端编码器、后盖以及伺服驱动器;
2、所述输出法兰安装于个隔爆外壳上,所述后盖通过螺钉与隔爆外壳连接,通过隔爆外壳、输出法兰以及后盖形成隔爆腔体;
3、所述谐波减速机固定在隔爆外壳上,所述谐波减速机与输出法兰连接;
4、所述无框力矩电机定子固定在隔爆外壳上,所述无框力矩电机与谐波减速机连接;
5、所述谐波减速机输入轴尾端设计有编码器连接孔,所述输入端编码器安置其上,在谐波减速机输入轴旋转时,输入端编码器即可判断其旋转角度及旋转速度;
6、所述谐波减速机输入轴后端设计有制动齿安装槽,所述制动齿安装在谐波减速机输入轴上的制动齿安装槽上,当需要制动时,即可将输入轴制动,停止动力输出;
7、所述伺服驱动器安装在隔爆外壳上,通过排线与输入端编码器、输出端编码器及无框力矩电机联通,所述输入端编码器及输出端编码器将其采集值传输给伺服驱动器,所述伺服驱动器通过其内置算法对防爆机器人关节输出转速、力矩进行判断并进行下一步规划。
8、优选的,所述谐波减速机输出端通过螺钉与输出法兰连接。
9、优选的,所述谐波减速机设计有整体式输入轴。
10、优选的,所述无框力矩电机转子压接于整体式输入轴上,当无框力矩电机转子转动时即可带动谐波减速机输入轴旋转,通过减速后,带动输出法兰旋转,实现动力输出。
11、优选的,所述隔爆外壳与输出法兰连接处设计隔爆接合面一。
12、优选的,所述隔爆接合面一的宽度≤0.15mm,且长度≥12.5mm。
13、优选的,所述隔爆外壳与后盖连接处设置隔爆接合面二。
14、优选的,所述隔爆接合面二宽度≤0.15mm,且长度≥12.5mm。
15、优选的,所述谐波减速机输出端与输出法兰连接处设计螺纹隔爆接合面三。
16、优选的,所述螺纹隔爆接合面三长度≥14mm。
17、有益效果:本发明结构合理,设计新颖,具备隔爆功能,可用于爆炸性环境,具有双编码器,可消除机械传动过程中的误差,模块化设计,易于拼装成各种结构形式机器人。
技术特征:
1.一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于,其包括隔爆外壳(1)、输出法兰(2)、谐波减速机(3)、无框力矩电机(4)、制动齿(5)、输入端编码器(6)、输出端编码器(7)、后盖(8)以及伺服驱动器(9);
2.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述谐波减速机(3)输出端通过螺钉与输出法兰(2)连接。
3.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述谐波减速机(3)设计有整体式输入轴。
4.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述无框力矩电机(4)转子压接于整体式输入轴上,当无框力矩电机(4)转子转动时即可带动谐波减速机(3)输入轴旋转,通过减速后,带动输出法兰(2)旋转,实现动力输出。
5.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述隔爆外壳(1)与输出法兰(2)连接处设计隔爆接合面一。
6.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述隔爆接合面一的宽度≤0.15mm,且长度≥12.5mm。
7.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述隔爆外壳(1)与后盖(8)连接处设置隔爆接合面二。
8.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述隔爆接合面二宽度≤0.15mm,且长度≥12.5mm。
9.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述谐波减速机(3)输出端与输出法兰(2)连接处设计螺纹隔爆接合面三。
10.根据权利要求1所述的一种用于爆炸性环境的外壳隔爆机器人关节,其特征在于:所述螺纹隔爆接合面三长度≥14mm。
技术总结
本发明涉及一种用于爆炸性环境的外壳隔爆机器人关节,其包括隔爆外壳、输出法兰、谐波减速机、无框力矩电机、制动齿、输入端编码器、输出端编码器、后盖以及伺服驱动器;所述输出法兰安装于个隔爆外壳上,所述后盖通过螺钉与隔爆外壳连接,通过隔爆外壳、输出法兰以及后盖形成隔爆腔体;本发明结构合理,设计新颖,具备隔爆功能,可用于爆炸性环境,具有双编码器,可消除机械传动过程中的误差,模块化设计,易于拼装成各种结构形式机器人。
技术研发人员:刘华,曲小龙,张军,石世杰,张博
受保护的技术使用者:沈阳新松数字驱动有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!