一种消毒机器人及控制系统和方法
本发明涉及机器人,具体为一种消毒机器人及控制系统和方法。
背景技术:
1、目前市面上已可见到各式各样的特种机器人,以在不同领域辅助人们工作的展开和进行。在现有技术中,上海擎朗智能科技有限公司发布的消毒机器人m2,其拥有全自主定位导航,可智能自主避障和自主乘坐电梯,提供跨楼层消毒防疫服务等。丹麦机器人公司blue ocean robotics制造的一款uvd机器人也可实现病房自主移动,消毒能力强。但是目前国内外消毒机器人大多数是在现有服务机器人的基础上通过增加紫外线消毒灯等装置,采用uv-c等照射的方式按照事先设置的路线进行自动化消毒。这种照射消毒效率高,但存在一定的安全隐患。消毒机器人的消毒作业都对人体有害,且目前的消毒机器人的使用环境大多为医院等公共场所,需在无人环境下进行,对环境的安全度要求较高。因此,可以在有人环境下长期使用的消毒机器人是差异化的竞品。
2、且医院、学校等场景存在楼梯、坡面等不同路面情况,常规消毒机器人无法实现对需要消毒场所的全覆盖。对于电梯按钮和楼梯扶手等人们经常接触的需要消毒的部位,无法进行充分的消毒,使用喷雾消毒的方式又会造成消毒液的浪费,并影响卫生环境,常规消毒机器人消毒模式单一,无法有效代替人工。
技术实现思路
1、本发明所要解决的技术问题在于:解决现有的消毒机器人在楼梯和坡面不同路面的情况,无法实现对消毒场所的全覆盖,对电梯按钮和楼梯扶手,人们经常接触的需要消毒的部位,无法进行充分消毒的问题。
2、为解决上述技术问题,本发明提供如下技术方案:
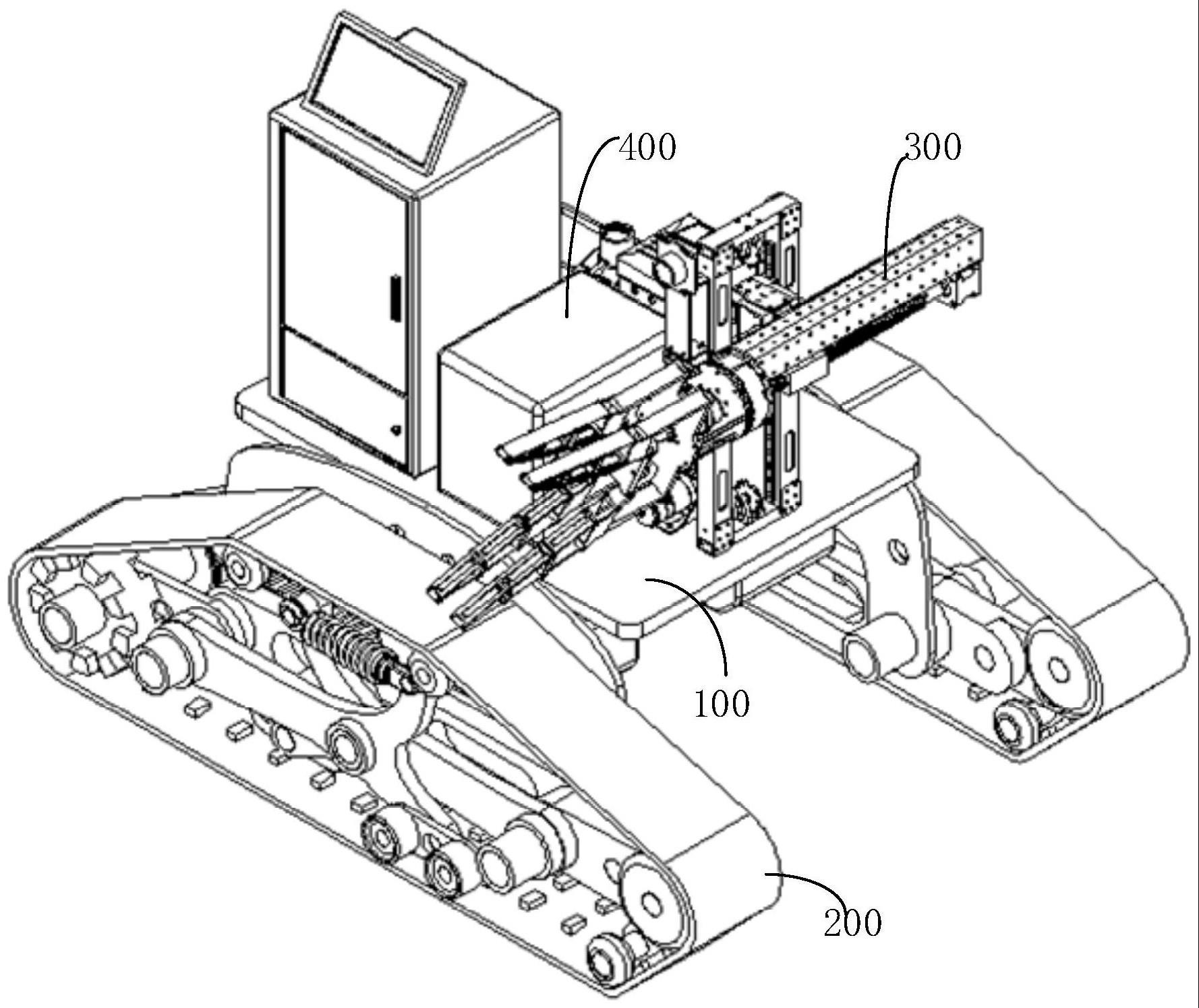
3、一种消毒机器人,包括车体(100)、位于所述车体(100)两侧的履带底盘(200)、位于所述车体(100)上端的机械手(300)和消毒装置(400);所述履带底盘(200)能够攀爬斜面路况和楼梯,所述车体(100)为所述履带底盘(200)提供动力,所述机械手(300)能够对楼梯扶手和电梯按钮进行消毒;所述消毒装置(400)与所述机械手(300)管连接,以及能够对常规路面进行雾化消毒。
4、优点:履带底盘能够攀爬斜面路况和楼梯,机械手能够对楼梯扶手和电梯按钮进行消毒,解决人们经常接触的需要消毒的部位,无法进行充分消毒的问题。
5、在本发明的一实施例,所述履带底盘(200)包括支撑梁(210)、悬挂车架(220)和连接架(230);所述车体(100)的侧板(120)的连接腿、所述支撑梁(210)、所述连接架(230)的一端和所述悬挂车架(220)的主悬挂车架梁(221)依次同轴铰接。
6、在本发明的一实施例,所述悬挂车架(220)包括主悬挂车架梁(221),以及主悬挂车架梁(221)的一端分叉,并沿着分叉的两端延伸形成第一辅悬挂车架梁(222)和第二辅悬挂车架梁(223);且一对所述悬挂车架(220)的主悬挂车架梁(221)在靠近辅悬挂车架一端铰接;所述履带底盘(200)还包括弹簧气缸(240),所述弹簧气缸(240)的两端分别与一对所述悬挂车架(220)的第一辅悬挂车架梁(222)固定连接。
7、在本发明的一实施例,所述履带底盘(200)还包括减速组件(250)、主动组件(260)、张紧组件(270)和履带(280);所述减速组件(250)与所述车体(100)的电机及减速器组件(130)的输出轴同步连接;所述主动组件(260)的主动轴(262)穿过所述连接架(230)的第一连接架(231)后再与所述减速组件(250)同轴连接,并与所述减速组件(250)同步运动;所述张紧组件(270)与所述连接架(230)的第二连接架(232)铰接;所述张紧组件(270)和所述主动组件(260)分别位于所述支撑梁(210)的两端,所述履带(280)包裹述张紧组件(270)和所述主动组件(260),且所述电机及减速器组件(130)的输出轴带动所述减速组件(250)转动,同步带动所述主动组件(260)转动,所述主动组件(260)带动的所述履带(280)转动,所述履带(280)转动带动所述张紧组件(270)转动。
8、在本发明的一实施例,所述履带底盘(200)还包括支撑轮组(2910)和平衡轮组(2920);一对所述支撑轮组(2910)位于所述第一辅悬挂车架梁(222)之上,其所述支撑轮组(2910)的支撑轴(2911)与所述车体(100)的侧板(120)连接;一对所述平衡轮组(2920)位于所述第二辅悬挂车架梁(223)之下;所述连接架(230)的第三连接架(233)与所述第二辅悬挂车架梁(223)铰接,并与所述平衡轮组(2920)连接;所述履带(280)包裹一对所述支撑轮组(2910)和一对所述平衡轮组(2920),以及一对所述支撑轮组(2910)和一对所述平衡轮组(2920)能够在沿着所述履带(280)转动。
9、在本发明的一实施例,所述机械手(300)包括提升装置(310)、导轨装置(3240)和机械爪装置(350);所述提升装置(310)与所述导轨装置(3240)链传动,为所述导轨装置(3240)提供动力;所述机械爪装置(350)与所述导轨装置(3240)连接,所述导轨装置(3240)带动所述机械爪装置(350)定位到楼梯扶手或电梯按钮处。
10、在本发明的一实施例,所述提升装置(310)包括提升电机(311)、与所述提升电机(311)输出轴固定连接的第一提升轮(312)、分别固定位于所述导轨装置(3240)上端和下端的第二提升轮(313)和第三提升轮(314),以及与所述第一提升轮(312)、所述第二提升轮(313)和所述第三提升轮(314)链传动的提升链;且所述提升电机(311)固定位于所述导轨装置(3240)的一侧,所述第一提升轮(312)、所述第二提升轮(313)和所述第三提升轮(314)的分布布置,使所述提升链呈三角形状。
11、在本发明的一实施例,所述导轨装置(3240)包括纵向导轨(320)、与所述纵向导轨(320)垂直固定连接的横向导轨(330)以及与所述横向导轨(330)固定连接的旋转导轨(340),所述机械爪装置(350)与所述旋转导轨(340)输出端固定连接;所述纵向导轨(320)包括纵向导轨架(321),所述纵向导轨架(321)的一端与所述车体(100)固定连接和能够沿着所述纵向导轨架(321)纵向移动的纵向移动块(322);所述第二提升轮(313)和所述第三提升轮(314)分别固定位于所述纵向导轨架(321)内的上端和下端;所述提升链穿过所述纵向移动块(322),能到带动所述纵向移动块(322)纵向移动;所述横向导轨(330)包括横向导轨架(331)、一端与所述纵向移动块(322)固定连接,另一端与所述横向导轨架(331)卡合的横向固定块(332)、与所述横向导轨架(331)一端固定连接的横向导轨电机(333)、与所述横向导轨架(331)连接,且一端还与所述横向导轨电机(333)输出端固定连接的丝杆(334)以及套设在所述丝杆(334)上,能够沿着所述丝杆(334)横向移动的横向移动块(335),且所述横向移动块(335)还与所述横向固定块(332)的下端面固定连接,能够带动所述横向导轨架(331)横线移动;所述旋转导轨(340)包括与所述横向导轨架(331)的另一端固定连接的固定支架(341)、与所述固定支架(341)固定连接的固定盘(342)和与所述固定盘(342)固定连接的旋转电机(343)。
12、在本发明的一实施例,所述机械爪装置(350)包括与所述旋转电机(343)的旋转面固定连接的固定板(351)、一端与所述固定板(351)固定连接的多个连接杆(352)、一端与多个所述连接杆(352)的另一端铰接的连接片(353)、与所述连接片(353)另一端铰接的活动板(354)和与所述连接片(353)铰接的柔性夹爪(355);所述机械爪装置(350)还包括一端与所述旋转电机(343)的旋转面固定连接的夹紧电机(356),且所述夹紧电机(356)的另一端依次穿过所述固定板(351)和所述活动板(354);以及所述夹紧电机(356)与所述活动板(354)的连接段上设置有螺纹杆(3561),所述夹紧电机(356)正反转时,能够使所述活动板(354)在所述螺纹杆(3561)上移动,连动带动所述柔性夹爪(355)夹紧或松开。
13、在本发明的一实施例,所述柔性夹爪(355)包括一端与所述连接片(353)铰接的连接板(3551)、一端与所述连接板(3551)铰接的多个连杆架(3552),且多个所述连杆架(3552)从靠近所述连接片(353)一侧至所述连接板(3551)的另一端,其高度依次降低、与所述连接片(353)和所述连接架(3552)、相邻两个连接架(3552和所述连接架(3552)与所述连接板(3551)铰接的多个擦拭板(3553);每个所述擦拭板(3553)都包括擦拭框架(3554)和位于所述擦拭框架(3554)之间,且与所述擦拭框架(3554)连接的海绵滚筒(3555);所述擦拭框架(3554)上粘贴有棉质层,所述海绵滚筒(3555)内设置有与所述消毒装置(400)的管接的消毒管道,所述消毒管道传输消毒水,以浸润所述海绵滚筒(3555)。
14、在本发明的一实施例,所述消毒装置(400)包括固定位于所述车体(100)上端面的消毒水箱(410)、水泵(420)和消毒柜(430)和固定位于所述车体(100)下端面的喷头(440);所述消毒水箱(410)、所述水泵(420)和所述喷头(440)通过所述消毒管道管接;所述消毒柜(430)内部设置有两层,一层用于放置消毒产品,另一层用于放置所述消毒机器人的控制系统的硬件;所述消毒机器人还包括摄像装置(500),所述摄像装置(500)固定位于所述固定支架(341)上。
15、本发明还提供一种消毒机器人的控制系统,用于控制上述所述消毒机器人的动作,包括:上位控制系统解析模块(610)、上位控制系统显示模块(620)、车辆操纵模块(630)、指令模块(640)、远程模块(650)和动作控制模块(660);摄像装置(500)与所述上位控制系统解析模块(610)通信连接,所述上位控制系统解析模块(610)将所述摄像装置(500)采集的视频图像进行解析,并将解析数据发送给所述上位控制系统显示模块(620)用以显示;所述车辆操纵模块(630)用于实时对所述消防机器人定位,并根据定位数据控制所述消毒机器人行动的操纵系统,并将定位数据传递给所述上位控制系统显示模块(620)显示实时定位;所述指令模块(640)用于生成所述消毒机器人的动作指令,并将所述动作指令传递给所述远程模块(650),所述远程模块(650)将所述动作指令传递给动作控制模块(660),所述动作控制模块(660)根据动作指令操纵所述消毒机器人工作。
16、本发明还提供一种消毒机器人的控制方法,所述控制方法还包括:
17、s110,获取摄像装置采集的图像;
18、s120,执行目标检测算法,通过所述目标检测算法检测判断采集的图像是否为目标物体;若是则执行下一步s130,若否则返步骤s110;
19、s130,获取所述目标物体所在位置;
20、s140,通过单目测距算法,对所述消毒机器人至所述目标物体所在位置进行测距;
21、s150,根据测距结果,获取所述目标物体的实际坐标,所述消毒机器人按照实际坐标方向行使。
22、在本发明的一实施例,所述通过单目测距算法,对所述消毒机器人至所述目标物体所在位置进行测距,包括以下步骤:
23、设置物理成像平面坐标系为xyz,基于摄像装置建立的真实世界坐标系为x’y’z’;
24、获取所述物理成像平面坐标系与真实世界坐标系的对应关系;
25、对摄像装置进行横纵长像素匹配的缩放,对应的获取所述目标物体在所述真实世界坐标系的移动坐标,以及获取所述目标物体在所述真实世界坐标系;
26、其中,所述获取所述目标物体在所述真实世界坐标系,通过以下公式获取:
27、u=αx′+cα
28、v=βy′+cβ;
29、
30、
31、式中,u表示为摄像装置自身的轴系,目标物体到摄像装置镜头的距离;v表示为摄像装置自身的轴系,成像到摄像装置镜头的距离;x′、y′表示为真实世界坐标;x、y和z表示为物理成像平面坐标系;f表示为光心o与物理成像平面的距离;α表示为在u轴上缩放的倍数;β表示为在v轴上的缩放倍数;cα和cβ表示为摄像装置在进行横纵长像素缩放后,目标物体在真实世界x′和y′坐标上的移动坐标。
32、在本发明的一实施例,所述控制方法还包括履带底盘的控制方法:
33、建立所述消毒机器人的运动模型,根据所述运动模型实现对两侧的履带底盘的运动速度控制,通过对两侧的履带底盘之间的速差,实现所述消毒机器人的转向;
34、其中,建立所述运动模型,包括以下步骤:
35、s210,根据速度和对时间的积分,获取所述车体两侧的左履带底盘、右履带底盘和左、右两个履带地盘之间的横向距离中心点的行使路程;
36、s220,根据所述左履带底盘的行驶路程、所述右履带底盘的行驶路程和所述横向距离中心点的行使路程,以及所述消毒机器人同时前进和旋转产生的转弯半径和左、右两个履带地盘之间的横向距离,获取所述消毒机器人在一定时间内的旋转角度;
37、s230,根据所述旋转角度,获取所述消毒机器人绕所述横向距离中心点的中心点目标旋转速度;
38、s240,根据所述中心点目标旋转速度,获取所述左履带底盘和所述右履带底盘的实时速度;
39、其中,所述车体两侧的左履带底盘、右履带底盘和左、右两个履带地盘之间的横向距离中心点的行使路程,通过以下公式获取:
40、arc_l=v_l*t;
41、arc_m=vx*t;
42、arc_r=v_r*t;
43、式中,arc_l、arc_r和arc_m表示为车体两侧的左履带底盘、右履带底盘和左、右两个履带地盘之间的横向距离中心点的行使路程;v_l和v_r表示为左履带底盘和右履带底盘的行使速度;vx表示为横向距离中心点的目标前进速度;t表示为时间;
44、所述消毒机器人在一定时间内的旋转角度通过以下公式获取:
45、θ=arc_l/(r–w/2)=arc_m/r=arc_r/(r+w/2);
46、式中,θ表示为旋转角度;r表示为消毒机器人同时前进和旋转产生的转弯半径;w表示为左、右两个履带地盘之间的横向距离;
47、所述中心点目标旋转速度通过以下公式获取:
48、vz=v_l/(r–w/2)=vx/r=v_r/(r+w/2);
49、式中,vz表示为消毒机器人绕所述横向距离中心点的中心点目标旋转速度;vx表示为消毒机器人绕所述横向距离中心点的目标前进速度;
50、对中心点目标旋转速度公式变形,可获取:
51、r=vx/vz;
52、vx/r=v_l/(r–w/2)=v_r/(r+w/2);
53、所述左履带底盘和所述右履带底盘的实时速度,通过以下公式获取:
54、v_lt=vx–w/2*vz;
55、v_rt=vx+w/2*vz;
56、式中,v_lt表示为左履带底盘的实时速度;v_rt表示为右履带底盘的实时速度。
57、与现有技术相比,本发明的有益效果是:采用履带底盘的设计,使消毒机器人的应用范围更加广阔,能够开展更多地形下的消毒作业。将机器视觉和柔性机械爪技术等用于消毒领域,可接触式消毒方法能够有效地对楼梯扶手和电梯按钮等部位进行消毒,消毒液残留少,效率高。通过发明的控制方案可实现自动消毒功能,智能化程度高,搭配喷雾消毒及紫外线消毒柜,可以有效替代人工作业,提高机器人的多作业环境适应性。
- 还没有人留言评论。精彩留言会获得点赞!