一体式关节及外骨骼机器人
本技术涉及机器人,特别是涉及一种一体式关节及外骨骼机器人。
背景技术:
1、驱动关节是外骨骼机器人的核心组成部分,驱动关节的好坏对外骨骼机器人的运动性能以及人机交互性能有直接影响。传统外骨骼机器人的驱动关节内的电机和减速器的集成度较低,导致驱动关节的体积和重量过大,从而导致驱动关节的灵活性下降以及实时响应性能变差,进而影响驱动关节甚至外骨骼机器人的运动性能和运动精度,减小驱动关节的转矩密度。并且,现有驱动关节采用电机和减速器之间的传动机构的结构复杂且重量大,难以满足驱动关节轻量化和小型化的要求。
技术实现思路
1、基于此,有必要提供一种一体式关节及外骨骼机器人,以解决现有的驱动关节电机和减速器的集成度较低,电机和减速器之间的传动机构的结构复杂且重量大,导致驱动关节体积过大、转矩密度过低且性能下降的问题。
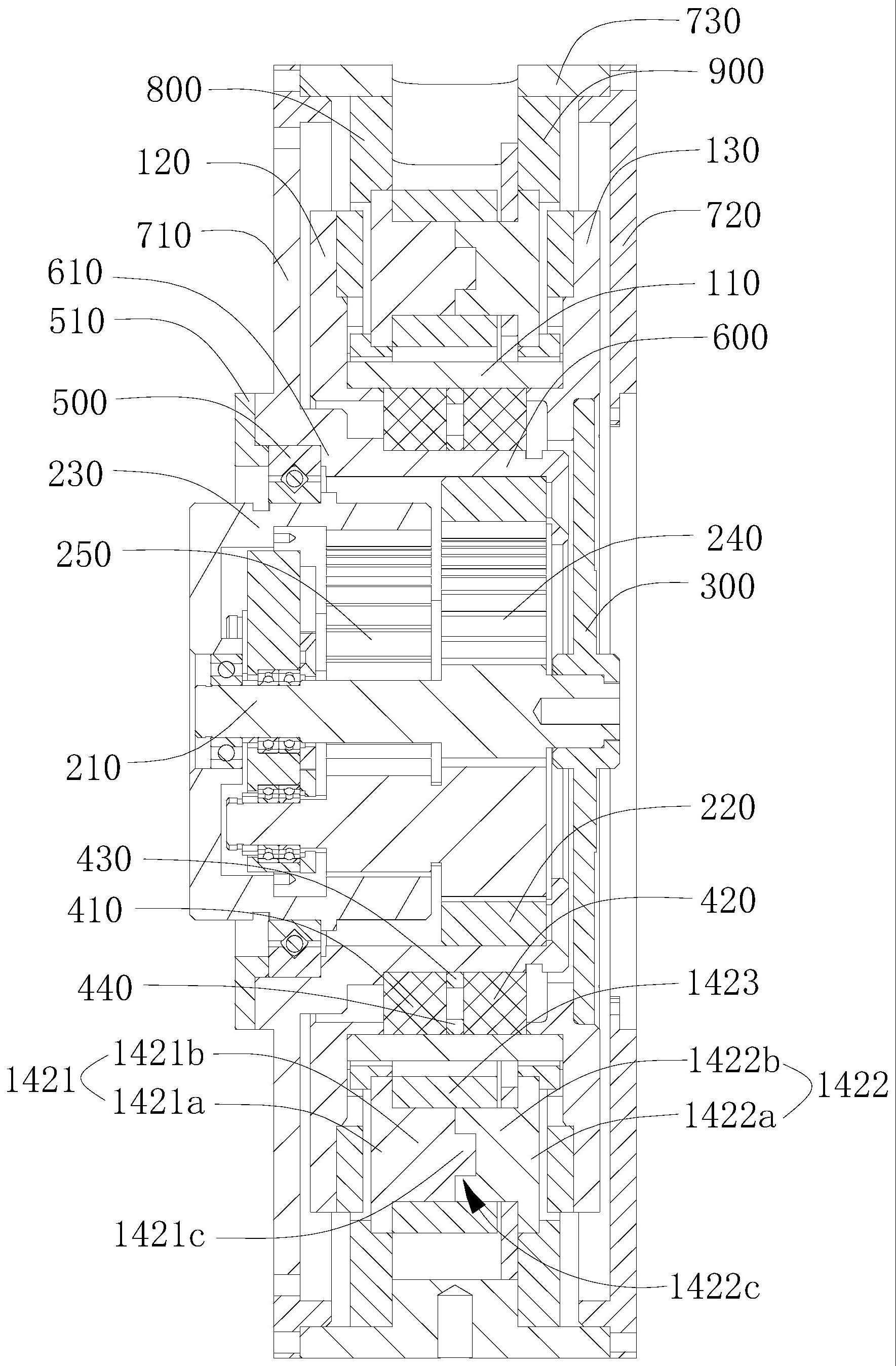
2、本技术提供的一体式关节包括环绕式电机结构、行星齿轮减速器和输出转接件,环绕式电机结构通过输出转接件连接行星齿轮减速器,环绕式电机结构套设于行星齿轮减速器的外侧并与行星齿轮减速器的输出端同轴设置。环绕式电机结构包括转子连接件、第一转子组件、第二转子组件以及夹设于第一转子组件和第二转子组件之间的定子组件,第一转子组件和第二转子组件通过转子连接件固定连接,以使第一转子组件和第二转子组件能够同步转动。并且,第一转子组件、第二转子组件和定子组件均围绕环绕式电机结构的轴线环设于行星齿轮减速器的外周侧。
3、在其中一个实施例中,定子组件包括pcb接线板和多个分块铁芯绕组,pcb接线板呈环形,且pcb接线板设有多个围绕环绕式电机结构的轴线均匀分布的安装孔,每一安装孔对应装设有一个分块铁芯绕组。
4、在其中一个实施例中,分块铁芯绕组包括第一分块铁芯、第二分块铁芯和感应线圈,第一分块铁芯包括第一挡块和第一接头,第二分块铁芯包括第二挡块和第二接头,且第一接头和第二接头中的一者设有卡槽,另一者对应卡槽设有凸起,以使第一接头和第二接头能够通过凸起和卡槽相互卡接配合。感应线圈的两端分别套设于第一接头和第二接头,并且,第一挡块和第二挡块分别止挡于感应线圈的两端,pcb接线板通过安装孔套设于第一接头或者第二接头的外侧,当pcb接线板套设于第一接头的外侧时,pcb接线板夹设于感应线圈和第一挡块之间,当pcb接线板套设于第二接头的外侧时,pcb接线板夹设于感应线圈和第二挡块之间。
5、在其中一个实施例中,一体式关节还包括第一定子固定盘和第二定子固定盘,第一定子固定盘和第二定子固定盘沿着环绕式电机结构的轴向分布,并且,第一定子固定盘和第二定子固定盘分别固定夹设于定子组件的两端,以对定子组件进行轴向限位。
6、在其中一个实施例中,第一定子固定盘设有围绕环绕式电机结构轴线分布的多个第一限位槽,第一限位槽和第一分块铁芯一一对应设置,且多个第一限位槽远离环绕式电机结构轴线一侧的圆弧面对应的半径相等且圆弧面的圆心均位于环绕式电机结构的轴线上,并且,第一分块铁芯远离环绕式电机结构轴线的一侧端面分别抵接于对应第一限位槽远离环绕式电机结构轴线一侧的圆弧面;
7、及/或,第二定子固定盘设有围绕环绕式电机结构轴线分布的多个第二限位槽,第二限位槽和第二分块铁芯一一对应设置,且多个第二限位槽远离环绕式电机结构轴线一侧的圆弧面对应的半径相等且圆弧面的圆心均位于环绕式电机结构的轴线上,并且,第二分块铁芯远离环绕式电机结构轴线的一侧端面分别抵接于对应第二限位槽远离环绕式电机结构轴线一侧的圆弧面。
8、在其中一个实施例中,第一转子组件包括第一背铁和多个第一永磁体,第一背铁呈环形,且第一背铁设有多个围绕环绕式电机结构的轴线均匀分布的第一安装槽,每一第一安装槽对应装设有一个第一永磁体。第二转子组件包括第二背铁和多个第二永磁体,第二背铁呈环形,且第二背铁设有多个围绕环绕式电机结构的轴线均匀分布的第二安装槽,每一第二安装槽对应装设有一个第二永磁体。
9、在其中一个实施例中,转子连接件呈圆筒状,且转子连接件的两端通过紧固件分别可拆卸连接于第一背铁和第二背铁,并且,定子组件套设于转子连接件的外侧。
10、在其中一个实施例中,行星齿轮减速器包括太阳轴、固定内齿圈、输出内齿圈、第一行星齿轮和第二行星齿轮,固定内齿圈和输出内齿圈分别套设于太阳轴的外侧并沿着太阳轴的轴向分布。太阳轴和固定内齿圈之间设有多个沿着太阳轴周向分布的第一行星齿轮,第一行星齿轮分别啮合连接太阳轴和固定内齿圈的齿形内壁,且固定内齿圈固定设置,以使太阳轴能够带动多个第一行星齿轮围绕自身轴线相对固定内齿圈转动。太阳轴和输出内齿圈之间设有多个沿着太阳轴周向分布的第二行星齿轮,第二行星齿轮和第一行星齿轮一一对应设置并连接对应的第一行星齿轮,以使第一行星齿轮能够带动第二行星齿轮同步转动,并且,第二行星齿轮啮合连接输出内齿圈的齿形内壁,输出连接件连接太阳轴和第一转子组件,或者,输出连接件连接太阳轴和第二转子组件,以使环绕式电机结构能够依次通过太阳轴、第一行星齿轮和第二行星齿轮带动输出内齿圈围绕自身轴线转动。
11、在其中一个实施例中,输出连接件呈圆盘状并与太阳轴同轴设置,且输出连接件连接于太阳轴远离输出内齿圈的一端。
12、在其中一个实施例中,一体式关节还包括固定连接的第一轴承组、第二轴承组、内壳体和外壳体,外壳体覆盖于环绕式电机结构的外侧,内壳体一端连接于外壳体靠近输出内齿圈的内圈边缘处,另一端沿着环绕式电机结构的轴向延伸并隔挡于环绕式电机结构和行星齿轮减速器之间。第一轴承组设于环绕式电机结构和内壳体之间,且转子连接件通过第一轴承组连接于内壳体。第二轴承组设于输出内齿圈和内壳体之间,且输出内齿圈通过第二轴承组连接于内壳体。
13、本技术还提供一种外骨骼机器人,该外骨骼机器人包括以上任意一个实施例所述的一体式关节。
14、与现有技术相比,本技术提供的一体式关节及外骨骼机器人,相比于现有技术中,减速器设于电机的输出端,在本技术中,环绕式电机结构套设于行星齿轮减速器的外侧,如此设置,大大缩短了整个一体式关节的轴向长度,满足外骨骼机器人对一体式关节的扁平化需求,减小了一体式关节的体积和重量,从而减小了一体式关节的惯性和移动阻力,进而大大提高了一体式关节的响应速率和运行精度。并且,环绕式电机结构与行星齿轮减速器的输出端同轴设置,以及,环绕式电机结构通过输出转接件连接行星齿轮减速器,因此可知,如此设置,大大提高了一体式关节的结构集成度。
15、进一步地,由于环绕式电机结构包括通过转子连接件固定连接的第一转子组件和第二转子组件,因此,环绕式电机结构的输出转矩等于第一转子组件的输出转矩和第二转子组件的输出转矩之和。如此,大大提高了环绕式电机结构的输出转矩,结合一体式关节的重量减小可知,如此设置,提高了一体式关节的转矩密度。
16、更进一步地,由于行星齿轮减速器具有较强的反向驱动能力,因此,在一些特殊情况下,例如外骨骼机器人电量耗尽等情况下,人体能够驱动一体式关节进行反转,确保了外骨骼机器人的正常运转,防止外骨骼机器人卡死。
- 还没有人留言评论。精彩留言会获得点赞!