工业机器人位置校正方法和工业机器人与流程
本发明涉及工业机器人,特别涉及一种工业机器人位置校正方法和工业机器人。
背景技术:
1、工业机器人,是广泛用于工业领域的多关节机械手或多自由度的机器装置,包括码垛机器人、搬运机器人、焊接机器人、装配机器人和检测机器人等。只要对工业机器人的进行编程后,机器人就能按照设定的步骤对产品进行码垛、搬运、焊接、装配和检测。
2、但是,多数大型工业机器人无法安装在设备内部,而是安装在流水线一侧的地面上,由于厂房地面的平面度无法保证,也很难被测量,因此极大的影响了工业机器人工作时的精度,需要工程师对机器人不断地进行调试。
技术实现思路
1、本发明的主要目的是提供一种工业机器人位置校正方法,旨在解决现有工业机器人位置精度调试复杂的问题。
2、为实现上述目的,本发明提出一种工业机器人位置校正方法,包括:
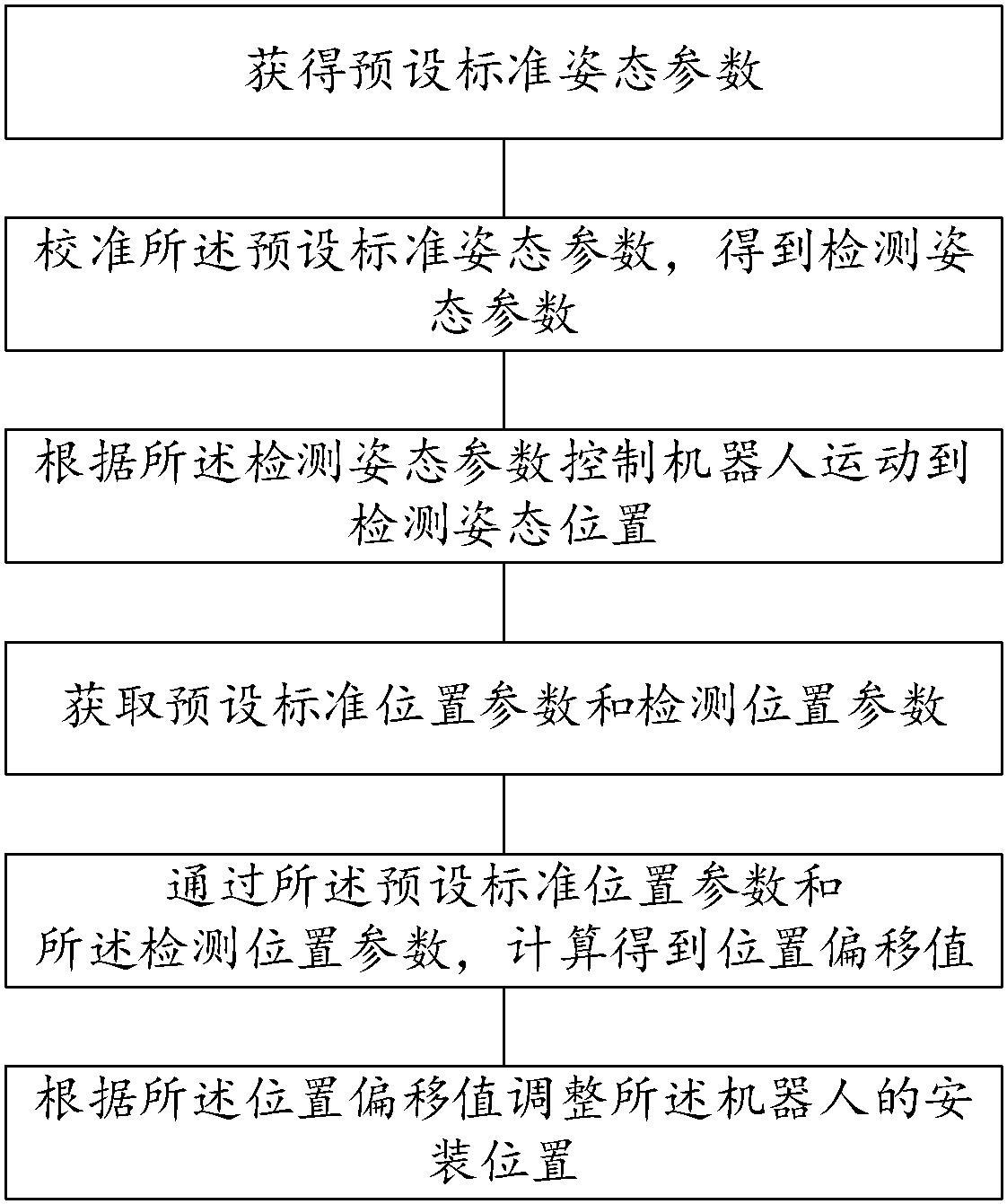
3、获得预设标准姿态参数;
4、校准所述预设标准姿态参数,得到检测姿态参数;
5、根据所述检测姿态参数控制机器人运动到检测姿态位置;
6、获取预设标准位置参数和检测位置参数;
7、通过所述预设标准位置参数和所述检测位置参数,计算得到位置偏移值;
8、根据所述位置偏移值调整所述机器人的安装位置。
9、可选地,所述校准所述预设标准姿态参数,得到检测姿态参数的步骤包括:
10、获得机器人的空程参数;
11、根据所述空程参数校准所述标准姿态参数,得到检测姿态参数。
12、可选地,所述获得机器人的空程参数的步骤包括:
13、控制机器人位于第一姿态;
14、控制所述机器人顺时针从第一姿态运动到第二姿态,得到第一位置参数;
15、控制所述机器人逆时针从第一姿态运动到第三姿态,得到第二位置参数;
16、通过所述第一位置参数和所述第二位置参数,计算得到所述机器人的空程参数。
17、可选地,所述机器人的第一姿态为所述机器人的机械臂呈竖直的姿态,所述机械臂两相背的侧壁的等距位置分别设有第一检测点和第二检测点,用于获得所述第一检测点或所述第二检测点距离所述机械臂的侧壁的距离;
18、所述控制所述机器人顺时针从第一姿态运动到第二姿态,得到第一位置参数的步骤包括:
19、基于力矩t,控制所述机械臂从第一姿态顺时针旋转到第二姿态,所述第一检测点距离与所述机械臂的一侧壁的距离值为第一位置参数α1;
20、所述控制所述机器人逆时针从第一姿态运动到第三姿态,得到第二位置参数的步骤包括:
21、基于力矩t,控制所述机械臂从第一姿态逆时针旋转到第三姿态,所述第二检测点距离与所述机械臂的另一侧壁的距离值为第二位置参数α2。
22、可选地,所述机器人包括多个机械臂,多个机械臂之间通过运动关节连接,每一所述机械臂两相背的侧壁的等距位置分别设有第一检测点和第二检测点,所述控制机器人位于第一姿态的步骤包括:
23、控制所述机器人的其中一个所述机械臂进入第一姿态,关闭其他所述机械臂;
24、所述基于力矩t,控制所述机械臂从第一姿态顺时针旋转到第二姿态,所述第一检测点距离与所述机械臂的一侧壁的距离值为第一位置参数α1的步骤包括:
25、基于力矩t,控制所述机械臂以预设次数反复从第一姿态顺时针旋转到第二姿态,每旋转一次获得所述检测点距离与所述机械臂的侧壁的距离值为第一位置参数α1i,i为当前反复的次数;
26、所述基于力矩t,控制所述机械臂从第一姿态逆时针旋转到第三姿态,所述第二检测点距离与所述机械臂的另一侧壁的距离值为第二位置参数α2的步骤包括:
27、基于力矩t,控制所述机械臂以预设次数反复从第一姿态逆时针旋转到第三姿态,每旋转一次获得另一所述检测点距离与所述机械臂的侧壁的距离值为第二位置参数α2j,j为当前反复的次数,i=j;
28、所述通过所述第一位置参数和所述第二位置参数,计算得到所述机器人的空程参数的步骤之后包括:
29、关闭所述机器人已计算所述空程参数的所述机械臂,选择未计算所述空程参数的机械臂进入所述第一姿态,直到所述机器人的所有所述机械臂均计算对应的所述空程参数。
30、可选地,所述计算所述第一位置参数和所述第二位置参数得到所述机器人的空程参数的计算公式如下所示:
31、;
32、s代表关节空程计算结果,单位为弧分;
33、α1i代表第i次从第一姿态旋转到第二姿态时第一位置参数,单位mm;
34、α2j代表第j次从第一姿态旋转到第三姿态时第二位置参数,单位mm;
35、r代表所述第一检测点或所述第二检测点距离位于所述第一姿态的所述机械臂的所述运动关节的轴线的距离,单位mm。
36、可选地,所述获得预设标准姿态参数的步骤包括:
37、在仿真模拟系统内控制机器人运动到标准姿态;
38、获得所述机器人在仿真模拟系统内的多个运动关节的角度参数,作为预设标准姿态参数。
39、可选地,所述机器人的末端设有位置测量点,所述获取预设标准位置参数和检测位置参数的步骤包括:
40、获得所述机器人在仿真模拟系统内的所述位置测量点距离工件的标准空间坐标p(x1,y1,z1),作为预设标准位置参数;
41、获得所述机器人在实际场合中所述位置测量点距离工件的检测空间坐标o(x2,y2,z2),作为检测位置参数。
42、可选地,所述通过所述预设标准位置参数和所述检测位置参数,计算得到位置偏移值的步骤包括:
43、将所述检测空间坐标和所述标准空间坐标相减p-o=(x1-x2,y1-y2,z1-z2),得到位置偏移值∣x1-x2∣、∣y1-y2∣和∣z1-z2∣;
44、所述根据所述位置偏移值调整所述机器人的安装位置的步骤包括:
45、根据所述∣x1-x2∣、∣y1-y2∣和∣z1-z2∣以及方向调整所述机器人的安装位置,使得p(x1,y1,z1)=o(x2,y2,z2)。
46、本发明还提出一种工业机器人,执行上述任意一种工业机器人位置校正方法,所述工业机器人包括:
47、多个机械臂,多个所述机械臂之间通过运动关节连接;
48、安装底座,所述机械臂连接于所述安装底座,所述安装底座用于调节所述机械臂的空间位置;
49、空程检测装置,所述空程检测装置安装于所述机械臂的侧壁;及
50、位置检测装置,所述位置检测装置安装于所述机械臂的末端。
51、本发明技术方案中,在机器人的仿真模拟系统中,获取到工程师设计的工业机器人的标准姿态参数,以及工业机器人距离工件的预设标准位置参数。将标准姿态参数输入工业机器人中,使得工业机器人运动到检测姿态,从而可以获得检测姿态下,工业机器人距离工件的检测位置参数。比较预设标准位置参数和检测位置参数可得其中的位置偏移值,基于位置偏移值调整工业机器人的安装位置。使得工业机器人与工件的相对位置符合工程师的设计,从而减少厂房地板平面度对工业机器人的影响,提高工业机器人的位置精度。
- 还没有人留言评论。精彩留言会获得点赞!