机器人DH参数标定方法、装置、电子设备及存储介质与流程
本技术涉及机器人,特别涉及一种机器人dh参数标定方法、装置、电子设备及存储介质。
背景技术:
1、关节式串联机器人在位置环的控制模式上,通常可以分为半闭环控制和全闭环控制。机器人在这两种不同的控制模式下利用高精度测量设备所标定出的dh参数是不同的,在某些情况下,机器人需要保存全闭环控制模式和半闭环控制模式下的dh参数,则需要分别在全闭环控制模式和半闭环控制模式下对机器人的dh参数各标定一次。
2、dh参数标定不仅需要采用高精度测量设备对机器人的末端中心点的位姿等参数进行测量,还需要对测量数据进行处理。如果分别在全闭环控制模式下和半闭环控制模式下对机器人的dh参数各标定一次,则会导致机器人在dh参数标定环节耗时较长,不利于缩短生产周期和提高生产效率。
技术实现思路
1、有鉴于现有技术中存在的上述问题,本技术提供了一种机器人dh参数标定方法、机器人dh参数标定装置、电子设备及计算机可读存储介质,本技术实施例采用的技术方案如下所示。
2、本技术第一方面提供了一种机器人dh参数标定方法,包括:
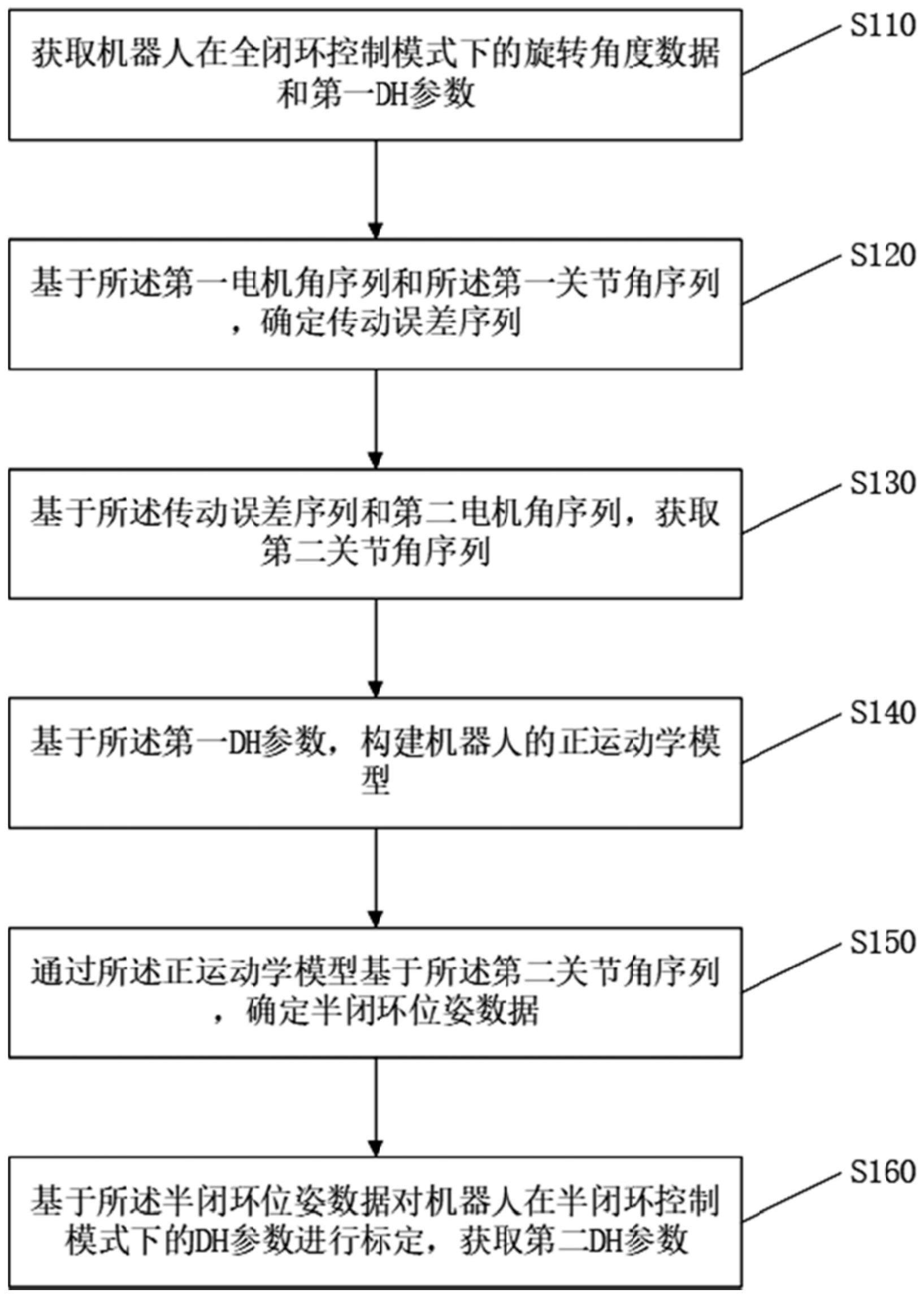
3、获取机器人在全闭环控制模式下的旋转角度数据和第一dh参数;所述旋转角度数据包括机器人在多个第一目标姿态下第一电机角序列和第一关节角序列,所述第一电机角序列包括机器人各个关节模组的电机输出侧的旋转角度,所述第一关节角序列包括机器人各个关节模组的关节输出侧的旋转角度;所述第一dh参数为机器人在全闭环控制模式下标定的dh参数;
4、基于所述第一电机角序列和所述第一关节角序列,确定传动误差序列,所述传动误差序列包括所述机器人各个关节模组的电机输出侧和关节输出侧之间的传动误差;
5、基于所述传动误差序列和第二电机角序列,获取第二关节角序列;所述第二电机角序列包括机器人各个关节模组的电机输出侧的旋转角度,所述第二电机角序列能够在半闭环控制模式下控制机器人运动至第二目标姿态;所述第二关节角序列包括机器人在第二目标姿态下各个关节模组的关节输出侧的旋转角度;
6、基于所述第一dh参数,构建机器人的正运动学模型,所述正运动学模型能够表征机器人末端中心点的位姿与各个关节模组的关节输出侧的旋转角度之间的关联关系;
7、通过所述正运动学模型基于所述第二关节角序列,确定半闭环位姿数据,所述半闭环位姿数据用于描述机器人在第二目标姿态下末端中心点的位姿;
8、基于所述半闭环位姿数据对机器人在半闭环控制模式下的dh参数进行标定,获取第二dh参数。
9、在一些实施例中,获取机器人在全闭环控制模式下的第一dh参数,包括:
10、获取机器人在全闭环控制模式下的全闭环位姿数据,所述全闭环位姿数据用于描述机器人在第一目标姿态下的末端中心点的位姿;
11、基于所述全闭环位姿数据对机器人在全闭环控制模式下的dh参数进行标定,获取所述第一dh参数。
12、在一些实施例中,获取机器人在全闭环控制模式下的全闭环位姿数据,包括:
13、在全闭环控制模式下,基于所述第一关节角序列控制机器人运动至第一目标姿态;
14、通过检测装置检测机器人末端中心点的位姿,获取所述全闭环位姿数据。
15、在一些实施例中,机器人的各个关节模组的电机输出侧和关节输出侧分别设置有电机编码器和关节编码器;
16、获取机器人在全闭环控制模式下的旋转角度数据,包括:
17、在全闭环控制模式下,控制机器人分别运动至各个第一目标姿态;
18、通过机器人各个关节模组的电机编码器检测各个电机输出侧的旋转角度,形成第一电机角序列;
19、通过机器人各个关节模组的关节编码器检测各个关节输出侧的旋转角度,形成第一关节角序列。
20、本技术第二方面提供了一种机器人dh参数标定装置,包括:
21、第一获取模块,用于获取机器人在全闭环控制模式下的旋转角度数据和第一dh参数;所述旋转角度数据包括机器人在多个第一目标姿态下第一电机角序列和第一关节角序列,所述第一电机角序列包括机器人各个关节模组的电机输出侧的旋转角度,所述第一关节角序列包括机器人各个关节模组的关节输出侧的旋转角度;所述第一dh参数为机器人在全闭环控制模式下标定的dh参数;
22、第一确定模块,用于基于所述第一电机角序列和所述第一关节角序列,确定传动误差序列,所述传动误差序列包括所述机器人各个关节模组的电机输出侧和关节输出侧之间的传动误差;
23、第二获取模块,用于基于所述传动误差序列和第二电机角序列,获取第二关节角序列;所述第二电机角序列包括机器人各个关节模组的电机输出侧的旋转角度,所述第二电机角序列用于在半闭环控制模式下控制机器人运动至第二目标姿态;所述第二关节角序列包括机器人在第二目标姿态下各个关节模组的关节输出侧的旋转角度;
24、构建模块,用于基于所述第一dh参数,构建机器人的正运动学模型,所述正运动学模型能够表征机器人末端中心点的位姿与各个关节模组的关节输出侧的旋转角度之间的关联关系;
25、第二确定模块,用于通过所述正运动学模型基于所述第二关节角序列,确定半闭环位姿数据,所述半闭环位姿数据用于描述机器人在第二目标姿态下末端中心点的位姿;
26、标定模块,用于基于所述半闭环位姿数据对机器人在半闭环控制模式下的dh参数进行标定,获取第二dh参数。
27、在一些实施例中,所述第一获取模块具体用于:
28、获取机器人在全闭环控制模式下的全闭环位姿数据,所述全闭环位姿数据用于描述机器人在第一目标姿态下的末端中心点的位姿;
29、基于所述全闭环位姿数据对机器人在全闭环控制模式下的dh参数进行标定,获取所述第一dh参数。
30、在一些实施例中,所述第一获取模块具体用于:
31、在全闭环控制模式下,基于所述第一关节角序列控制机器人运动至第一目标姿态;
32、通过检测装置检测机器人末端中心点的位姿,获取所述全闭环位姿数据。
33、在一些实施例中,机器人的各个关节模组的电机输出侧和关节输出侧分别设置有电机编码器和关节编码器;所述第一获取模块具体用于:
34、在全闭环控制模式下,控制机器人分别运动至各个第一目标姿态;
35、通过机器人各个关节模组的电机编码器检测各个电机输出侧的旋转角度,形成第一电机角序列;
36、通过机器人各个关节模组的关节编码器检测各个关节输出侧的旋转角度,形成第一关节角序列。
37、本技术第三方面提供了一种电子设备,至少包括存储器和处理器,所述存储器上存储有程序,所述处理器在执行所述存储器上的程序时实现如上任一实施例所述的方法。
38、本技术第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,在执行所述计算机可读存储介质中的所述计算机可执行指令时实现如上任一实施例所述的方法。
39、本技术实施例的机器人dh参数标定方法,获取机器人在全闭环控制模式下的旋转角度数据和第一dh参数;基于所述第一电机角序列和所述第一关节角序列,确定传动误差序列;基于所述传动误差序列和第二电机角序列,获取第二关节角序列;基于所述第一dh参数,构建机器人的正运动学模型;通过所述正运动学模型基于所述第二关节角序列,确定半闭环位姿数据;基于所述半闭环位姿数据对机器人在半闭环控制模式下的dh参数进行标定,获取第二dh参数。如此,在已完成机器人在全闭环模式下的dh参数标定的基础上,能够计算出半闭环位姿数据,并不需要控制机器人运动至多个第二目标姿态来测量机器人的末端中心点的位姿,能够显著缩短生产周期并提高生产效率。
- 还没有人留言评论。精彩留言会获得点赞!