基于异型工作空间的液压机械臂遥操作主从异构匹配方法与流程
本发明涉及一种机械臂遥操作主从异构匹配方法,涉及多关节液压机械臂遥操作领域,具体涉及一种基于异型工作空间的液压机械臂遥操作主从异构匹配方法。
背景技术:
1、液压机械臂通常应用于重载等严苛的操作任务,但随着工业的发展和人类探索的不断向前,液压机械臂作业任务的复杂性不断加大,其对作业精确性的要求也不断提高。同时,现阶段液压机械臂的本体控制精度远未达到工业机械臂的微米级控制精度程度,并且其对环境信息的处理能力弱,实时反应动作指令生成慢,因此现今技术条件下液压机械臂全自主作业难度较大,操作者人工介入的遥操作仍然是现阶段更为合理的机械臂作业方式。然而,现阶段液压机械臂遥操作实现的最主要问题之一是其与市面上的通用主手物理构型差异过大,两者作业空间的相似性较低,从而导致主端操作指令无法在从端得到准确复现,影响液压机械臂实际遥操作效果;而针对于液压机械臂的物理构型针对性定制主手虽然可以避免主从异构的问题,但是无疑极大地增加了作业成本。因此,如何解决液压机械臂遥操作过程中面临的主从异构问题从而在节省作业成本的同时提升实际作业效果是急需解决的问题。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种基于异型工作空间的液压机械臂遥操作主从异构匹配twam方法。本发明方法解决主从端物理构型差异过大、主从工作空间相似性过低情况下液压机械臂遥操作效果差的问题。本发明具体来说是一种针对液压机械臂遥操作过程中的主从异构情况所提出的一种基于异型工作空间的异构匹配方法,能够在液压机械臂与主端设备构型差异过大的情况下实现实际操作指令在从端(操作段)的准确复现,从而确保液压机械臂能够按照主端操作者的指令完成任务,提高液压机械臂实际遥操作效果。
2、本发明采用的技术方案是:
3、本发明的基于异型工作空间的液压机械臂遥操作主从异构匹配方法,包括:
4、第一步、在液压机械臂的从端液压机械臂和主端设备之间的自由度不一致的情况下,建立从端液压机械臂和主端设备的异型工作空间。
5、第二步、基于从端液压机械臂和主端设备的异型工作空间,使用遥操作指令自适应映射方法将从端液压机械臂和主端设备之间的维度进行匹配,最终实现液压机械臂遥操作主从异构匹配。
6、考虑到从端液压机械臂与主端设备自由度可能存在的自由度数目不一致从而导致的工作空间维度不对应的问题,提出异型工作空间构建方法,将两者的工作空间维度整合一致。基于已创建的异型工作空间,提出新型遥操作指令自适应映射方法,实现从端工作空间的充分利用并保证实际操作过程中液压机械臂遥操作指令的准确复现。
7、所述的第一步中,液压机械臂的从端液压机械臂和主端设备之间的自由度不一致具体为从端液压机械臂和主端设备的关节的自由度的数目和/或旋转方向不一致。
8、在采用市面上的通用主手作为主端设备时,主端设备和从端液压机械臂的物理构型往往不同,其自由度数量与设置也差别较大,从而导致主从工作空间维度不一致,进而导致主端操作指令无法在从端准确复现。因此,为了解决液压机械臂遥操作主从异构问题,首先需要对主从工作空间进行重新整合,统一两者的维度。因此,本发明提出了一种区别于传统笛卡尔空间的“异型工作空间”概念,以从端液压机械臂自由度数为根据,设置多维异型工作空间。
9、所述的第一步中,从端液压机械臂和主端设备的异型工作空间具体如下:
10、a)从端液压机械臂的从端异型工作空间:
11、将从端异型工作空间的维度设置为和从端液压机械臂的自由度数量n一致;在三维空间的六个自由度中,将从端液压机械臂所不包含的若干自由度使用广义欧拉定律法整合至从端液压机械臂所包含的若干自由度上,最终将从端液压机械臂的工作空间转换至从端异型工作空间。
12、b)主端设备的主端异型工作空间:
13、将主端异型工作空间的维度设置为和从端液压机械臂的自由度数量n一致;在三维空间的六个自由度中,将主端设备所不包含的若干自由度使用广义欧拉定律法整合至主端设备所包含的若干自由度上,最终将主端设备的工作空间转换至主端异型工作空间。
14、根据主、从端设备的自由度设置关联与实际遥操作任务的需求,对异型工作空间的每一维度进行单独定义。此外,在维度定义时,需要根据广义欧拉定律,将从端液压机械臂无法实现的运动自由度与其他能够实现的运动自由度整合为异型工作空间的一个维度,从而保证从端液压机械臂能够遍历异型工作空间的任意维度的任意位置。
15、所述的从端异型工作空间和主端异型工作空间中,当从端异型工作空间中的第m个维度和主端异型工作空间中的第m个维度的关节运动自由度方向相同,则从端异型工作空间中的第m个维度和主端异型工作空间中的第m个维度为同构维度,从端异型工作空间和主端异型工作空间中其余的维度为非同构维度。
16、维度的序号和关节运动自由度方向均相同时即为同构维度。
17、所述的第二步中,基于从端液压机械臂和主端设备的异型工作空间,使用遥操作指令自适应映射方法将从端液压机械臂和主端设备之间进行匹配,具体如下:
18、2.1)针对从端异型工作空间和主端异型工作空间中的每个同构维度,建立同构维度位置-位置映射模型,将同构维度实际操作指令输入同构维度位置-位置映射模型中,同构维度位置-位置映射模型输出同构维度指令映射结果。
19、2.2)针对从端异型工作空间和主端异型工作空间中的每个非同构维度,建立非同构维度位置-位置映射模型,将主端设备的自适应判定因子输入非同构维度位置-位置映射模型中,非同构维度位置-位置映射模型输出非同构维度指令映射结果。
20、2.3)建立遥操作指令自适应映射模型,将同构维度指令映射结果和非同构维度指令映射结果输入遥操作指令自适应映射模型中,遥操作指令自适应映射模型输出最终遥操作指令自适应映射结果,将在主端设备的各个维度的坐标转换至从端液压机械臂上,最终实现液压机械臂遥操作主从异构匹配。
21、所述的步骤2.1)中,同构维度位置-位置映射模型具体如下:
22、
23、其中,和pm分别为同构维度指令映射结果和同构维度实际操作指令,f()为位置-位置映射函数。
24、同构维度指令映射结果和同构维度实际操作指令pm分别具体为从端异型工作空间和主端异型工作空间的同构维度上的坐标。
25、当维度一(d1)为“同构维度”,将主、从异型工作空间维度(d1)的映射模式定义为比例位置-位置映射,即:
26、
27、其中,和分别为主、从端异型工作空间维度一(d1)上的坐标,λ为比例转换因子。
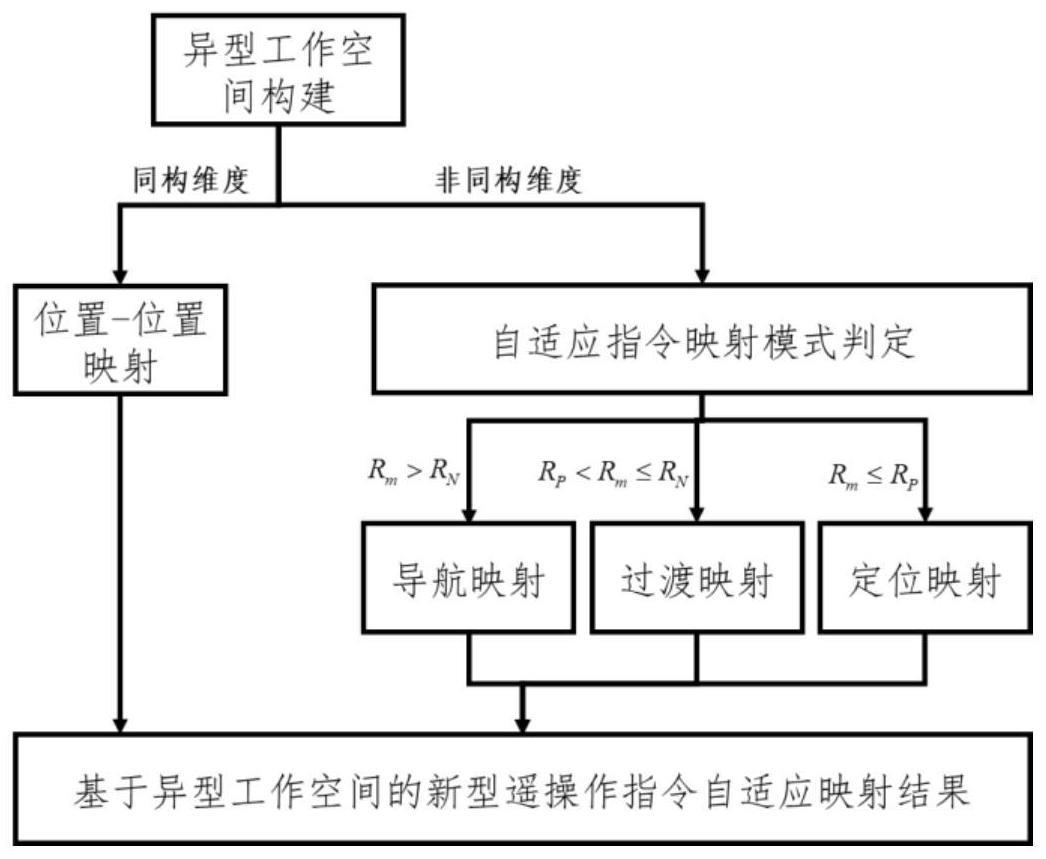
28、所述的步骤2.2)中,为了能够充分遍历从端工作空间并实现遥操作任务的精准实现,设置三种指令映射模式,并通过自适应切换的方式实现“非同构维度”上的指令映射。三种指令映射模式分别为:导航映射模式,定位映射模式以及过渡映射模式;同构维度位置-位置映射模型具体如下:
29、
30、其中,为非同构维度指令映射结果;pn、pt和pp分别为导航映射结果、过渡映射结果和定位映射结果;rm为主端设备末端点在主端异型工作空间的非同构维度中的位置与非同构维度中心点之间的距离,即自适应判定因子;rn和rp分别为预设第一模式切换距离阈值和预设第二模式切换距离阈值,通过该阈值可以在“非同构维”异型工作空间内划分出三种映射区域,当主端设备末端点在主端“非同构维”异型工作空间中的位置处于不同映射区域时执行相应的指令映射模式。
31、考虑到操作者可以直接控制主端设备末端点自由到达主端异型工作空间中的任意位置,所以以主端设备末端点在主端“非同构维”异型工作空间中的位置与主端“非同构维”异型工作空间中心点的距离rm为自适应判定因子,进行自适应指令映射模式判定。
32、所述的导航映射结果pn具体如下:
33、
34、
35、其中,为当前时刻从端液压机械臂末端在从端异型工作空间的非同构维度中所处的位置;为导航映射结果的一阶导,dt为映射指令更新时间;vmax为预设映射最大速度,其目的是保证映射指令在短时间内不会发生突变;vec(rm)为自适应判定因子rm的单位方向向量。
36、导航映射方式与常见的位置-速度映射方式类似,通过的矢量方向与距离长度决定映射指令变化速度的方向与大小。
37、所述的过渡映射结果pt具体如下:
38、
39、
40、其中,αt为过渡映射因子,其随自适应判定因子rm的变化而变化;和分别为当前时刻通过导航映射和定位映射方法所得到的参考结果。
41、所述的定位映射结果pp具体如下:
42、
43、
44、
45、
46、其中,分别为第一、二、…、i、…、m个非同构维度的单轴映射结果;λvom为单轴映射伸缩因子;和分别为非同构维度实际操作指令与从端“非同构维”异型工作空间焦点在第i个非同构维度dni轴上的坐标;为从端“非同构维”异型工作空间在第i个非同构维度dni轴上的映射中点;σvom为预设放缩比例因子;和分别为从端异型工作空间的非同构维度在第i个非同构维度轴dni上的最大值和最小值。
47、所述的步骤2.3)中,遥操作指令自适应映射模型具体如下:
48、
49、其中,pmap为最终遥操作指令自适应映射结果,和分别为同构维度指令映射结果和非同构维度自适应指令映射结果;o()为按照异型工作空间维度排序函数。
50、以示例机械臂为例,其最终的指令映射结果如下:
51、
52、其中,和分别为在“非同构维度”d2、d3和d4上的自适应指令映射结果。
53、通过第一步,考虑液压机械臂与主端设备的物理构型差异,建立了不同于传统笛卡尔空间的异型工作空间。通过第二步,将第一步中构建的异型工作空间维度分为“同构维度”和“非同构维度”,并对其分别进行位置-位置映射与自适应映射处理,最终得到自适应指令映射结果。所提出的基于异型工作空间的新型遥操作指令自适应映射方法twam能够实现液压机械臂遥操作过程中主从异构情况下主端操作指令在从端的完美复现,从而提高液压机械臂遥操作任务的实际完成效果,增强液压机械臂的遥操作能力。
54、在获得最终遥操作指令自适应映射结果pmap后,通过路径插值算法将映射结果点转化成带有时间轴的连续目标轨迹;然后,采用逆运动学解算器将连续目标轨迹结算至液压机械臂关节空间中,获得关节跟踪轨迹;另外,通过液压机械臂非线性控制器控制各关节跟随关节跟踪轨迹,最终实现主端操作者发出的操作指令并完成遥操作任务。
55、本发明的有益效果是:
56、1、本发明提出了一种新型的异型工作空间构建方法,实现了主从工作空间维度一致性整合,解决了从端液压机械臂与主端设备自由度不同导致主从作业空间维度不一致进而影响实际操作指令在从端无法准确复现的问题。
57、2、本发明提出了一种基于异型工作空间的新型遥操作指令自适应映射方法,实现从端工作空间的充分利用并保证实际操作过程中液压机械臂遥操作指令的准确复现,最终显著提升了主从异构情况下液压机械臂的遥操作效果。
- 还没有人留言评论。精彩留言会获得点赞!