一种打印用七轴机械手的制作方法
本发明属于机械手设备,具体的说是一种打印用七轴机械手。
背景技术:
1、机械手是一种具有多个旋转轴的工业机器人,也被称为多自由度机器人。它具有灵活的动作、高精度的控制、强大的负载能力和广泛的适用性,被广泛应用于制造、装配、焊接、涂装、搬运、3d打印等工业领域。
2、目前机械手大多采用导轨导向移动的方式,采用导轨导向移动时,机械手与导轨之间产生相对滑动,在导轨的支撑与导向下,能够有效的降低移动时的震感,增强机械手移动过程中的稳定性,然而由于导轨移动依赖提前布置的轨道,当机械手需要进行长距离平移,以满足不同生产线、码放位置之间的距离需求或者需要切换机械手的移动路径时,轨道的拆卸、改装难度较大,且轨道运动局限性较高,致使机械手的可移动效果较差。
3、相关技术中为了增强机械手的移动灵活性,通常会采用可自由运动的移动底座,对机械手进行移动,进而增强机械手的移动便捷性,然而在实施过程中发现,采用移动底座进行移动时,当运动场地的平整度无法满足要求时,机械手的运动存在较大的震动,不仅会增大机械手上拾取的零件脱落的几率,而且会导致机械手侧翻的几率增大,影响机械手使用时的安全性,容易发生安全事故,因此不便于机械手移动路径的频繁切换,鉴于此,本发明提出了一种打印用七轴机械手,用于解决上述技术问题。
4、公开于该背景技术部分的信息仅仅旨在加深对本发明总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现思路
1、为了弥补现有技术的不足,解决上述技术问题,本发明提出了一种打印用七轴机械手。
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种打印用七轴机械手,包括机械手本体和连接座,所述机械手本体安装在连接座上,所述机械手本体上安装有打印头;
3、还包括移动机构,所述连接座安装在移动机构上,所述移动机构用于辅助机械手本体进行移动;
4、所述移动机构包括移动底座,所述连接座安装在移动底座上;
5、滑块,所述连接座底部固定安装有滑块,所述移动底座上方开设有平移槽,所述滑块延伸至平移槽内,所述连接座与移动底座通过滑块、平移槽滑动连接;
6、展开轨,所述移动底座两端均安装有展开轨,所述展开轨与平移槽对接,所述滑块与展开轨相匹配;
7、驱动轮,所述滑块上转动连接有驱动轮,所述滑块内开设有驱动槽,所述驱动槽内安装有驱动电机,所述驱动电机输出端与驱动轮固定连接,所述驱动轮与平移槽、展开轨内壁均接触;
8、行走轮,所述移动底座上安装有连接轴,所述连接轴两端均延伸至移动底座外部,且转动安装有行走轮,所述行走轮为自带锁止结构的车轮;
9、平衡机构,所述平衡机构安装在移动机构上,所述平衡机构用于增强机器人连接座的力平衡系数。
10、具体的,所述移动机构还包括升降槽,所述移动底座上开设有升降槽,所述连接轴延伸至升降槽内,
11、调节轴,所述调节轴为双向螺杆,所述调节轴转动连接在升降槽内;
12、移动螺母与压板,所述调节轴上螺旋传动安装有对称的两个移动螺母,所述升降槽内滑动安装有压板,所述压板位于移动螺母与连接轴之间,所述压板靠近移动螺母一侧呈弧形设计;
13、手轮,所述调节轴一端延伸至升降槽外部,并于升降槽外固定安装有手轮。
14、具体的,所述展开轨与平移槽底部均开设有齿槽,所述驱动轮为齿轮,所述驱动轮与齿槽啮合。
15、具体的,所述展开轨与移动底座铰接连接,所述展开轨远离移动底座一端开设有转动槽,所述展开轨通过转动槽转动连接有支撑腿。
16、具体的,所述转动槽呈扇形,且转动槽中心角为钝角,所述转动槽一侧与展开轨上表面平行。
17、具体的,所述平衡机构包括滑环,所述滑环套设在连接座外侧;
18、卡板,所述滑环上固定安装有对称设计的卡板,所述卡板均为l形设计,用于与平移槽、展开轨滑动连接;
19、平衡支杆,所述滑环上安装有平衡支杆,所述平衡支杆于展开轨两侧对称分布。
20、具体的,所述滑环与连接座间隙配合,且两者之间通过弹簧弹性连接。
21、具体的,所述平衡机构还包括对称设计的液压传动杆,所述液压传动杆呈l形设置,所述液压传动杆固定安装在滑环上;
22、环板,所述液压传动杆顶端固定安装有环板,所述环板位于机械手本体的运动路径上;
23、所述平衡支杆固定安装于液压传动杆水平段远离滑环一端,所述平衡支杆底部固定安装有万向轮。
24、具体的,所述环板为不完全环形设计,且两个环板的间隙与展开轨的宽度相同。
25、本发明的有益效果如下:
26、1.本发明所述的一种打印用七轴机械手,通过将展开轨安装在移动底座上,并通过滑块、连接座,将机器人主体与展开轨、移动底座滑动连接,在机械手的使用过程中,当需要对机械手的使用位置进行长距离变动时,直接推动设备整体进行运动,对设备的整体位置进行调整,而当需要对机械手本体进行中短距离变化,或在作业过程中,需要机械手本体产生运动时,通过滑块在展开轨、移动底座上的滑动,增强机械手本体移动的便捷性。
27、2.本发明所述的一种打印用七轴机械手,通过设置由两个液压伸缩杆呈l形组合而成的液压传动杆,当液压传动杆的一端受到压力作用后,在其内部填充的液压油的力传导作用下,促使另一端伸长,进而带动平衡支杆向远离展开轨的方向运动,促使展开轨与液压传动杆、平衡支杆形成t形支撑结构,增强对机械手本体的支撑效果。
技术特征:
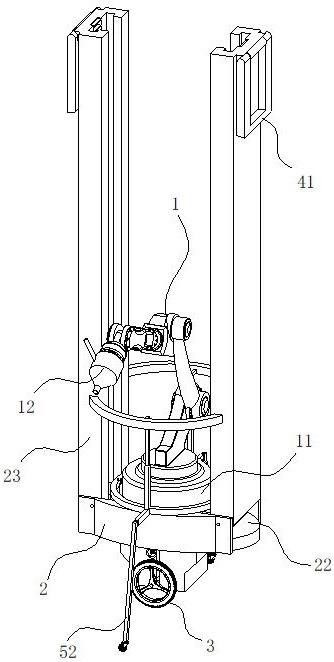
1.一种打印用七轴机械手,包括机械手本体(1)和连接座(11),所述机械手本体(1)安装在连接座(11)上,所述机械手本体(1)上安装有打印头(12);
2.根据权利要求1所述的一种打印用七轴机械手,其特征在于:所述移动机构还包括升降槽(32),所述移动底座(2)上开设有升降槽(32),所述连接轴(31)延伸至升降槽(32)内,
3.根据权利要求2所述的一种打印用七轴机械手,其特征在于:所述展开轨(23)与平移槽(22)底部均开设有齿槽(37),所述驱动轮(24)为齿轮,所述驱动轮(24)与齿槽(37)啮合。
4.根据权利要求3所述的一种打印用七轴机械手,其特征在于:所述展开轨(23)与移动底座(2)铰接连接,所述展开轨(23)远离移动底座(2)一端开设有转动槽(4),所述展开轨(23)通过转动槽(4)转动连接有支撑腿(41)。
5.根据权利要求4所述的一种打印用七轴机械手,其特征在于:所述转动槽(4)呈扇形,且转动槽(4)中心角为钝角,所述转动槽(4)一侧与展开轨(23)上表面平行。
6.根据权利要求5所述的一种打印用七轴机械手,其特征在于:所述平衡机构包括滑环(5),所述滑环(5)套设在连接座(11)外侧;
7.根据权利要求6所述的一种打印用七轴机械手,其特征在于:所述滑环(5)与连接座(11)间隙配合,且两者之间通过弹簧弹性连接。
8.根据权利要求7所述的一种打印用七轴机械手,其特征在于:所述平衡机构还包括对称设计的液压传动杆(53),所述液压传动杆(53)呈l形设置,所述液压传动杆(53)固定安装在滑环(5)上;
9.根据权利要求8所述的一种打印用七轴机械手,其特征在于:所述环板(54)为不完全环形设计,且两个环板(54)的间隙与展开轨(23)的宽度相同。
技术总结
本发明属于机械手设备技术领域,具体的说是一种打印用七轴机械手,包括机械手本体和连接座,所述机械手本体安装在连接座上;还包括移动机构,所述连接座安装在移动机构上,所述移动机构用于辅助机械手本体进行移动;平衡机构,所述平衡机构安装在移动机构上,所述平衡机构用于增强机器人连接座的力平衡系数,本发明通过将展开轨安装在移动底座上,并通过滑块、连接座,将机器人主体与展开轨、移动底座滑动连接,当需要对七轴机械手的使用位置进行长距离变动时,直接推动设备整体进行运动,对设备的整体位置进行调整,而当需要对机械手本体进行中短距离变化时,通过滑块在展开轨、移动底座上的滑动,增强机械手本体移动的便捷性。
技术研发人员:李进,余晓敏,段治江,陈晓敏
受保护的技术使用者:南京嘉翼精密机器制造股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!