一种基于脉搏波信号的机械臂按压力度控制方法和系统
本发明涉及计算机应用,更具体地,涉及一种基于脉搏波信号的机械臂按压力度控制方法和系统,尤其适应于股动脉穿刺点按压止血场景。
背景技术:
1、心脏介入治疗技术已成为冠心病、心律失常、先天性心脏病、瓣膜性心脏病等心血管疾病的常用治疗方法。桡动脉和股动脉是心脏介入治疗的主要手术路径。股动脉由于管径较粗便于穿刺和导管操作,在应对一些复杂病变时具有其他介入路径无法比拟的优势。然而,正是由于股动脉血管直径大、血流速度快,术后即刻止血难是困扰介入手术医生的另一问题。通常股动脉穿刺点止血法有三种:人工压迫止血法、机械压迫法及血管闭合器止血法。传统手工压迫法压迫时间长(拔管后压迫止血时间多在25分钟左右)、不易控制、止血效果差、患者肢体制动时间长,不仅增加了医生的劳动量,而且加重了患者的不适和痛苦,甚至导致尿潴留或背痛等症状。最近发展起来的动脉穿刺闭合器及股动脉压迫止血器,由于病人个体具有生理差异性(如血管条件、胖瘦),无法模拟人类操作者对不同个体穿刺点进行局部压迫的力度,往往因为加压错位或者加压力度不合适,反而增加了术后并发症的风险。
2、目前,临床常用的股动脉压迫止血器有升降支架式、充气式、旋扭式等。近年来,电子加压式止血器由于在工学稳定性与操控性能上有所突破而兴起。但是相关临床应用研究结果显示,虽然这些装置设备缩短了术后卧床和住院时间、一定程度上提高了患者舒适度,但由于缺乏对患者足背动脉搏动等生理信号的实时监测反馈、无法实时调节按压力度,使用该类装置的患者临床并发症发生率并不一定比人工按压低。因此,迫切需要借助机器人相关技术,设计专用的穿刺点即刻止血操作机构,使其能根据实时监测的患者体征信息自适应选择合适的按压方案,将按压操作与患者生命体征监护构成闭环,提高便捷性、灵活性、病人舒适度,减少术后并发症发生率。
3、在按压止血机器人的力控策略方面,常用的力控方法包括阻抗控制法、混合力/位置控制和智能控制等方式。阻抗控制方式通过实际检测机器人与环境之间的作用力不断的调整目标的阻抗参数,然后通过位置控制器控制机器人的位置,最终实现力控制。混合力/位置控制方式通过选择矩阵将机器人的运动空间分解为力控制空间与位置控制空间,为每个关节分配一种控制方式,实现对整个机器人进行力与位置分开控制。智能控制方式包含神经网络控制、优化算法控制、深度强化学习等。然而,数据驱动的智能控制方式存在模型复杂、参数较多、数据集不易收集等问题,并且训练后的模型鲁棒性较差、代价高昂。混合力/位置控制方式在按压止血的任务中不容易将按压的动作清晰地划分到合适的选择矩阵中。
4、综上,现有的穿刺点按压止血技术存在以下缺陷:按压力度无法根据不同患者的体型、血压等生理参数自适应调整;按压过程中患者制动时间长,无法根据患者的姿态变换自适应调整按压力度;基于数据驱动的按压力度智能控制方法鲁棒性差,训练成本高。
技术实现思路
1、本发明的目的是克服上述现有技术的缺陷,提供一种基于脉搏波信号的机械臂按压力度控制方法和系统。
2、根据本发明的第一方面,提供一种基于脉搏波信号的机械臂按压力度控制方法。该方法包括以下步骤:
3、采集目标的脉搏波信号;
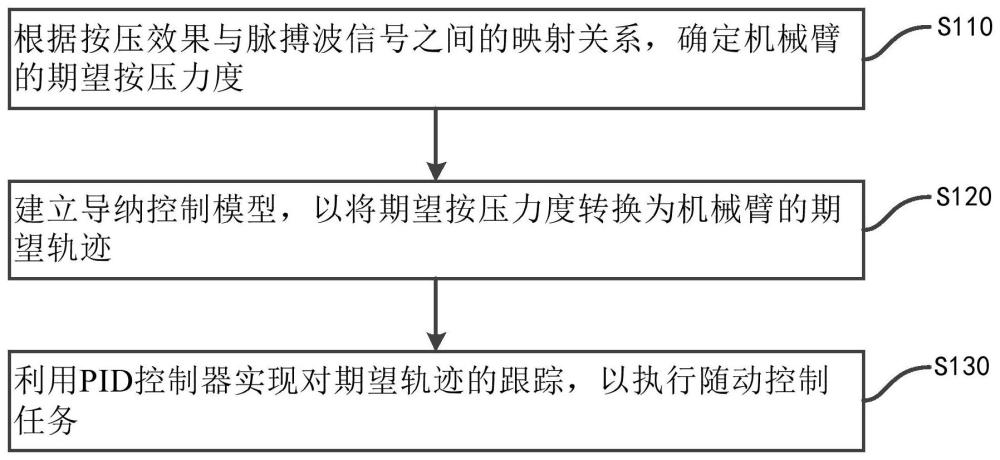
4、获取机械臂末端与目标之间的交互力,并根据按压效果与所述脉搏波信号之间的映射关系确定期望按压力度;
5、建立导纳控制模型,以将所述期望按压力度转换为机械臂的期望轨迹;
6、基于机械臂的实际轨迹与期望轨迹之间的误差,利用pid控制器确定机械臂后续移动的控制量,以实现对所述期望轨迹的跟踪。
7、根据本发明的第二方面,提供一种基于脉搏波信号的机械臂按压力度控制系统。该系统包括信号采集和处理模块、导纳控制模型、pid控制器和机械臂,其中,所述信号采集和处理模块用于采集目标的脉搏波信号,并获取机械臂末端与目标之间的交互力,进而根据按压效果与所述脉搏波信号之间的映射关系确定期望按压力度;所述导纳控制模型用于将所述期望按压力度转换为机械臂的期望轨迹;所述pid控制器用于基于机械臂的实际轨迹与期望轨迹之间的误差,确定机械臂后续移动的控制量,以实现对所述期望轨迹的跟踪。
8、与现有技术相比,本发明的优点在于,提出了一种按压止血机器人按压力度自适应控制方法。根据临床经验,对股动脉的按压力度不同,反映在下肢末端采集到的脉搏波的幅值会相应变化,随着对股动脉穿刺点按压力度的增加,脉搏波的幅值会逐渐减小,当按压力度完全切断脉搏波传播时,下肢末端采集到的脉搏波幅值为零。本发明根据脉搏波幅值与穿刺点按压力度的这一关系,提出一种基于脉搏波反馈的穿刺点按压止血机械臂按压力度自适应调整方法,提升了按压止血的有效性及舒适性。
9、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种基于脉搏波信号的机械臂按压力度控制方法,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述导纳控制模型表示为:
3.根据权利要求1所述的方法,其特征在于,所述pid控制器表示为:
4.根据权利要求1所述的方法,其特征在于,所述机械臂末端与目标之间的交互力利用设置在机械臂末端的柔性压力阵列传感器获得。
5.根据权利要求1所述的方法,其特征在于,所述脉搏波信号利用设置在目标同侧肢体末端的脉搏波测量传感器获得。
6.根据权利要求1所述的方法,其特征在于,根据以下步骤实现对所述期望轨迹的跟踪:
7.根据权利要求1所述的方法,其特征在于,所述按压效果是按压止血效果,该按压止血效果与按压状态的脉搏波信号幅值与正常脉搏波信号幅值的比例之间存在映射关系。
8.一种基于脉搏波信号的机械臂按压力度控制系统,包括信号采集和处理模块、导纳控制模型、pid控制器和机械臂,其中:
9.一种计算机可读存储介质,其上存储有计算机程序,其中,该计算机程序被处理器执行时实现根据权利要求1至7中任一项所述的方法的步骤。
10.一种计算机设备,包括存储器和处理器,在所述存储器上存储有能够在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明公开了一种基于脉搏波信号的机械臂按压力度控制方法和系统。该方法包括:采集目标的脉搏波信号;获取机械臂末端与目标之间的交互力,并根据按压效果与所述脉搏波信号之间的映射关系确定期望按压力度;建立导纳控制模型,以将所述期望按压力度转换为机械臂的期望轨迹;基于机械臂的实际轨迹与期望轨迹之间的误差,利用PID控制器确定机械臂后续移动的控制量,以实现对所述期望轨迹的跟踪。本发明实现了按压目标移动时低阻抗且柔顺的交互效果。
技术研发人员:孙方敏,李春阳,李烨,谢晓亮,唐闽
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!