采用多种结构光相机实现工业机器人末端路径自动规划装备的制作方法
本发明属于机器人自动化,其中的关键技术是采用多种结构光相机实现工业机器人末端路径自动规划方法。
背景技术:
1、随着工业化的进程,机器人末端执行器的姿态控制在空间曲面加工中面临着很大的挑战,传统的示教方法无法提供对机器人末端执行器姿态的准确控制,这意味着无法精确地确定机器人末端执行器的位置、方向和姿态,从而影响其在空间曲面上的加工效果。基于结构光相机实现工业机器人末端轨迹自动规划装备利用结构光技术的优势来解决传统方法的局限性,通过投射结构光图案并获取其在工件表面上的变形,可以获得更准确的工件表面形貌信息,从而实现对机器人末端执行器姿态的准确控制。
2、目前,常用的基于结构光的工件表面缝隙识别方法有基于线结构光的工件表面缝隙识别方法和基于面结构光的工件表面缝隙识别方法。如公开号为cn109676234a的中国专利文献公开了一种基于双线激光结构光的焊缝识别与跟踪系统及方法,所述激光发射器通过投射激光产生结构光平面,形成激光条纹。图像采集系统采集焊缝图像,计算机处理图像确定焊缝位置。通过标定相机和激光平面,计算焊缝的三维空间姿态。电机控制焊枪进行焊接,实现焊接过程的纠偏和焦点深度控制。公开号为cn116275383a的中国专利文献公开了一种焊缝识别参数自动生成的方法,所述方法利用面结构光提高对复杂焊缝的跟踪和适应能力,同时通过多个摄像机实现“眼随手动”,避免了焊工技术和经验带来的焊缝位置和间隙的偏差。
3、然而,基于线结构光的工件表面缝隙识别方法,需要人为的进行示教其缝隙的起点和终点。这意味着在使用该方法时,操作人员需要手动指定工件表面缝隙的起点和终点位置,以便系统能够准确地识别工件表面缝隙并进行相应的处理。这种示教过程必须通过人工操作或者使用特定的工具来完成,以确保工业机器人末端路径规划的准确性和可靠性。基于面结构光的工件表面缝隙识别方法,这种方法可以有效地识别工件表面缝隙,但由于使用面结构光的工件表面缝隙识别方法是先通过上位机将缝隙的三维信息提取完成后进行工业机器人末端路径的规划,所以在工业机器人工作过程中工件表面的形貌信息无法实时地对其进行提取。
技术实现思路
1、本发明的目的在于提供采用多种结构光相机实现工业机器人末端路径自动规划方法,能够解决已有技术的上述问题。
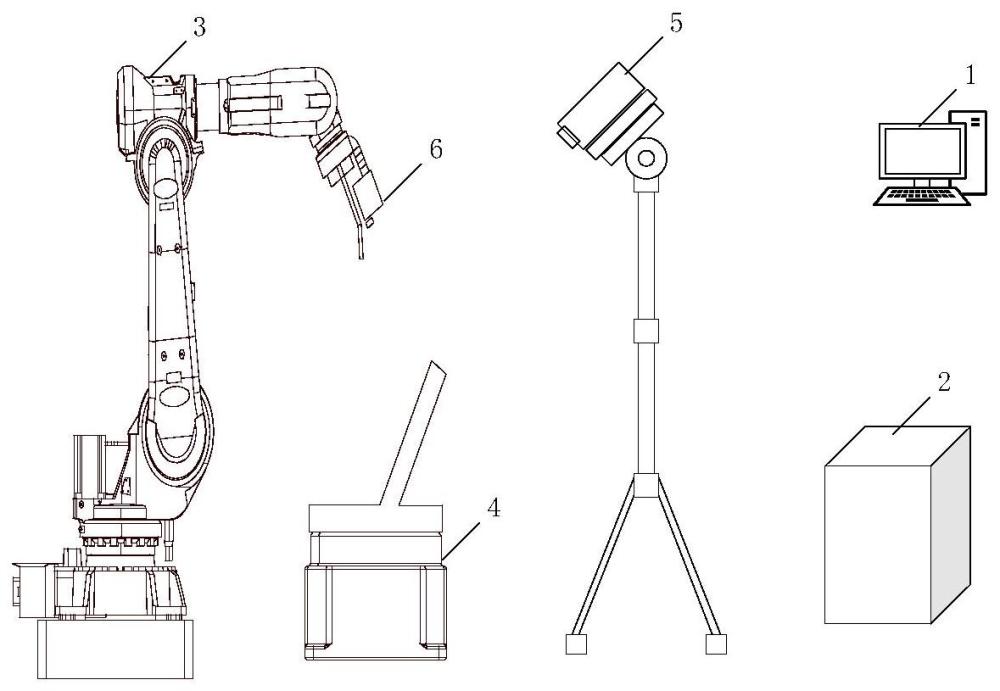
2、采用多种结构光相机实现焊缝自动识别装备,该装备至少包括上位机、机器人工作站和结构光相机,能够实现对工业机器人末端的路径规划。
3、所述机器人工作站至少包括:控制器、工业机器人和变位机;所述结构光相机至少包括面结构光相机和线结构光相机;
4、所述机器人工作站的控制器连接工业机器人和上位机;所述面结构光相机与上位机连接,并位于机器人工作站的变位机上方空间,用于获取工件表面的点云信息;所述线结构光相机安装在工业机器人的末端并与上位机连接,用于获取工件的线结构光条纹图像,并将该图像信息上传给上位机;
5、所述上位机一方面用于接收和处理面结构光相机获取的工件表面的点云信息,完成对工业机器人末端路径点的粗定位;另一方面接收和处理线结构光相机获取的线结构光条纹图像,完成对工业机器人末端路径点的精定位;最终根据所述路径点的精定位信息实现对工业机器人末端的路径规划。
6、本发明提供了一种工业机器人末端路径规划方法,过程至少包括以下步骤:
7、(1)完成工业机器人和结构光相机之间的手眼标定;
8、(2)当工件位于面结构光相机视场范围内时,面结构光相机对工件进行拍摄,再将面结构光相机获取的点云数据上传到上位机并记录变位机的位姿信息;
9、(3)在上位机中对面结构光相机获取的点云信息进行处理,提取出工件结合处的点云信息;
10、(4)完成工业机器人末端路径点的粗定位,根据粗定位的路径点信息,规划出工业机器人末端线结构光相机拍摄的运动路径;
11、(5)将运动轨迹信息下发到控制器,再由机器人控制器控制工业机器人沿着规划完成的路径进行运动,同时由线结构光相机获取工件的线结构光条纹图像,在上位机中对工业机器人末端路径点进行精定位,并完成工业机器人末端部分路径规划;
12、(6)机器人工作站的变位机工作,改变工件相对于面结构光相机的位置,并确保工件处在面结构光相机的有效视场范围内,重复步骤2~5,直到工业机器人末端路径规划完成。
13、与现有技术相比,本发明具有以下有益效果:
14、1、本发明能够提高工业机器人末端路径规划精度,并可以适应不同类型的工件结合处进行识别,具有广泛的适用性和通用性。
15、2、本发明提出了一种新的工件结合处识别方法,该方法使用面结构光相机对工件进行扫描,获取工件表面的三维点云数据,并通过图像转换和分析算法,自动检测出工件表面结合处的起点和终点位置,从而避免了传统方法中需要人工示教的繁琐步骤,提高了工业机器人末端路径规划的效率和精度。
16、3、本发明提出了一种工业机器人末端路径规划方法,该方法根据线结构光相机拍摄工件表面结合处的形貌信息,计算出工件表面缝隙与预设路径之间的偏差,并通过控制器和执行机构,及时而准确地将工业机器人末端调整回到预设路径上,从而实现对工业机器人末端路径的智能实时纠偏。该方法解决了传统方法中使用面结构光相机进行工件表面缝隙识别之后,无法对工业机器人末端路径规划中因为工件变形、装配误差等原因导致的工业机器人末端路径偏离进行有效纠正的问题。
技术特征:
1.采用多种结构光相机实现工业机器人末端路径自动规划装备,其特征在于:
2.根据权利要求1所述采用多种结构光相机实现工业机器人末端路径自动规划装备,其特征在于,所述实现对工业机器人末端的路径规划,至少包括以下步骤:
3.根据权利要求2的基于结构光相机实现工业机器人末端路径自动规划装备,其特征在于,步骤3中,所述提取出工件结合处的点云信息,具体步骤至少包括:
4.根据权利要求2的采用多种结构光相机实现工业机器人末端路径自动规划装备,其特征在于,步骤4中,所述完成工业机器人末端路径点的粗定位,具体步骤至少包括:
5.根据权利要求2的采用多种结构光相机实现工业机器人末端路径自动规划装备,其特征在于,步骤5中,所述在上位机中对工业机器人末端路径点进行精定位,并完成工业机器人末端部分路径规划具体为:
技术总结
本发明公开了一种采用多种结构光相机实现工业机器人末端路径自动规划装备,该装备至少包括上位机、机器人工作站和结构光相机,机器人工作站至少包括控制器、工业机器人和变位机,结构光相机至少包括面结构光相机和线结构光相机,机器人工作站的控制器连接工业机器人和上位机,面结构光相机与上位机连接,并位于机器人工作站的变位机上方空间,线结构光相机安装在工业机器人的末端并与上位机连接,上位机用于接收和处理面结构光相机获取的工件表面的点云信息和线结构光相机获取的线结构光条纹图像信息;最终实现对工业机器人末端的路径规划。本发明的装备相比传统的工业机器人末端路径自动规划方法,提高了工业机器人末端路径规划的效率和精度。
技术研发人员:潘海鸿
受保护的技术使用者:广西安博特智能科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!